NUnderwature and biological creatures are ser exploration, much like space exploration, has been at the frontier of science and engineering ventures. Some of the main sources of inspiration for humans. Engineers have aspired to emulate these natural systems. As rigid systems become increasingly limited in their capabilities to perforearly robotic systems sent by humans to explore marine life are known as remotely operated vehicles (ROVs). ROVs are underwater robots, manually operated by a pilot, using tethered communication. Soft robots made from complex tasks and adapt to their environment like living creatures, the need foriant materials can achieve shrinking and bending motion that allow them to navigate within narrow areas. The ability of soft systems has become more prominent due to the similarrobots to deform, change their shapes, exhibit infinite degrees of freedom, and perform complex, compliant, and flexible characteristics they share with intelligent natural systems. The field of soft robotics has been growing rapidly, with recent advances in the motion, makes them a suitable candidate for the basis of biological emulation, especially that of underwater application frontier, through the developmentcreatures, which are one of the sources of biomimetic underwater softinspiration for robotic and engineering systems.
- Soft Robotics
- Underwater Robots
- Design
- Modeling
- Control
- Reinforcement Learning
1. Introduction
Underwater exploration, much like space exploration, has been at the frontier of science and engineering ventures. As with the many Mars missions, where rovers and mobile robots are deployed instead of humans, deep underwater missions are mostly carried out using underwater robots. However, to this day, delving deep within the oceans of our planet still poses many challenges for these robotic systems. Some of the early robotic systems sent by humans to explore marine life are known as remotely operated vehicles (ROVs) [1]. ROVs are underwater robots, manually operated by a pilot, using tethered communication. They mainly have a rigid body hull and are actuated using electric thrusters. Autonomous underwater vehicles (AUVs) are similar to ROVs but differ in that they are untethered and do not require a pilot or an operator, as they are programmed to autonomously perform specific tasks. Both ROVs and AUVs vary in size, depending on the type of tasks they are manufactured to perform.
These underwater robotic systems are used to execute a wide range of underwater applications such as maintenance and monitoring applications. Such applications include underwater pipe inspection, offshore infrastructure repairs, and condition monitoring. Biological applications include seabed and abyssal exploration, sample gathering from marine environments such as coral reefs, and ecological aquatic phenomena monitoring and data collection [2]. More specifically, repairing and sampling tasks are carried out using underwater vehicle manipulator systems (UVMSs). UVMSs are unmanned underwater vehicles (UUVs) such as ROVs and AUVs that are equipped with different types of underwater manipulators that are suitable for the mentioned tasks [3]. The majority of manipulators used for underwater applications are actuated using hydraulic or electric systems. They can be used for the installation and maintenance 0f infrastructure such as pipes and cables [4], salvaging debris and sunken objects, mineral exploration [5], and biological samples gathering [6].
2. Underwater Locomotion
Marine environments can seem extraterrestrial for humans at times. Hence, the study of the locomotion techniques and the morphology of aquatic creatures is essential. These types of biological studies offer insights providing keys toward the successful mimicry of these marine creatures. The aquatic environment plays a large role in defining the types of underwater locomotion, as governed by the four main forces acting on bodies underwater [15][7]: vertical weight and buoyancy alongside hydrodynamic lift, and horizontal thrust and drag (Figure 1a). Fish are able to generate lift and thrust in order to swim. They can achieve swimming using their fins or swimming propulsors (Figure 1b). According to the motion of these fins, fish swimming methods can be classified into several categories.
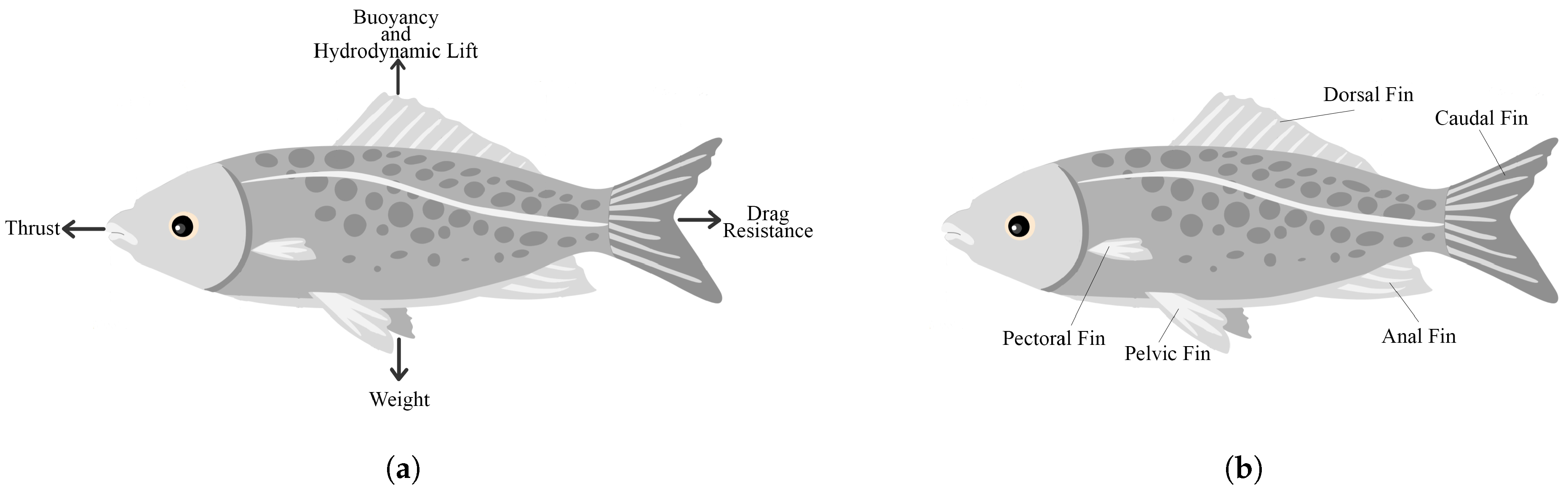
Figure 1. (a) The underwater forces acting on the fish during swimming. (b) Fish anatomy showing the different fins fish use to swim and stabilize.
The two main categorizations of fish motion are based on which fins are performing the bending motion and the frequency at which the fins move. In terms of the first category, fish use their body and/or caudal fin to generate thrust (BCF). Examples include carangiform and anguilliform such as tuna and eel. Other types of fish use their median and/or paired fins (MPF). Examples include rajiform and labriform such as batoids. The frequency of movement of the fish’s body and fins indicates whether the motion is undulatory or oscillatory. During undulatory motion, the fish’s body performs a wave-shaped pattern, whereas oscillatory swimming uses only swivel-like motion.
Additional underwater locomotion modes fall outside the previous categorizations [16][8]. One example is the jet propulsion performed by jellyfish, octopus, and squid. Drag-induced swimming is exhibited by turtles as they generate thrust by moving their flippers in the opposing direction of motion. Friction-based crawling is performed by crustaceans, and echinoderms such as starfish use adhesive-based crawling.
In terms of assessing swimming performance, one of the most important metrics is the swimming speed of fish and, in particular, the critical swimming speed (Ucrit), which is commonly measured in centimeters per second (cm/s) or body lengths per second (BL/s) [17,18][9][10]. One of the main factors that affects fish swimming speed is the tail beat frequency in Hertz (Hz). It relates to the fish’s velocity through the stride length, which is the distance traveled by the fish per tail beat, expressed as ratio of the body length (L) [19,20][11][12]. The Reynolds number (Re) and Strouhal number (St) are also important factors to assess the hydrodynamic performance of the fish’s swimming. Several robotic fish platforms inspired from actual fish morphology and swimming, such as tuna, use the same metrics to assess their robots’ performance [13,21,22,23][13][14][15][16]. Another important factor is to analyze the efficiency of fish propulsion. However, it is hard to establish an accurate measure of propulsive efficiency for real biological fish. In general, efficiency is defined as the ratio of useful output to total input. For a self-propelled body, the measure of such work depends on the drag the body needs to overcome to move, which is hard to quantify as it differs with the shape of the body, as well as the body-propulsor hydrodynamics [24]. It is also challenging to determine input power in fish, which relates to muscle shaft power and the fish’s metabolism and oxygen (fuel) consumption [25]. A common metric used to quantify the fitness of fish and their efficiency is the cost of transport (COT), defined as the energy expended per traveled distance. The COT is a good indication of the fish’s swimming efficiency, and there have been several attempts to define and normalize COT for fish propulsive efficiency [24,26,27,28].
3. Challenges and Potentials of Soft Robots
3.1. Design
3.1.1. Bioinspiration
3.1.2. Design Optimization
Even when taking inspiration from nature, designing soft robots with the desired mechanical behaviors that allow them to perform specific tasks presents another challenge. The complexity of such robotic systems, due to their unconventional components from materials to actuation, makes it hard to use currently known design and simulation tools to build soft robots [42,43][31][32]. Optimization techniques have been proposed to help automate the design process, and bridge the gap between simulation, fabrication, and the actual performance of soft robots. The general optimization framework can be summarized as choosing the design behavior to be optimized, such as crawling or grasping; identifying the design variables to be optimized, such as the material and the actuation; and defining the constraints of the system. The optimization process iteratively evaluates the design candidates using analysis tools and searches for the optimal design.
One approach uses evolutionary optimization algorithms to automate the design and manufacturing of freeform soft robots. This approach uses voxel-based dynamic simulation to evaluate the morphology and locomotion of the robot [44][33]. Voxels are soft cubic blocks with specific parameters, such as stiffness and Poisson’s ratio, that undergo volumetric change when forces are applied to them. Another voxel-based method aims to optimize the morphology to achieve adaptability using the property of criticality, which allows the robot to perform more diverse tasks [45][34].
Another conceptual design approach provides a spatial grammar to build soft robots and optimize their design for locomotion and actuation [46][35]. The spatial grammar generates sub-assemblies of interconnected balls based on a set of defined rules. The generated models are then evaluated and optimized in terms of locomotion abilities.
Performing design optimization for underwater soft robots is an even more challenging problem, as the effect of the environment on the robot’s morphology needs to be taken into account. DiffAqua [47][36], a computational design pipeline, relies on differentiable simulation to perform gradient-based optimization for the geometry and control of soft underwater swimmers. The benefits of exploiting the morphology of soft robots and optimizing it to simplify the control are further discussed in the upcoming modeling and control sections.
Fabricating and assessing these designs are also challenging processes due to the traditional manufacturing methods being unsuitable for these unconventional soft materials. Additive manufacturing (AM) is one of the impactful technologies that helped enable this process [48,49][37][38]. One approach is to use AM to only fabricate the mold that would be used to pour the soft material in them. A more hybrid approach takes advantage of AM techniques, such as the fused filament fabrication (FFF) method, in addition to molding techniques to fabricate and assemble complex soft robotic systems. The third approach is the total additive manufacturing (TAM) approach. It exploits all the benefits of AM to fabricate soft robots, whether by 3D printing multiple soft parts and assemble them, or manufacturing the complete soft robot as a whole part. Such advances in 3D printing techniques for soft materials increased the ability to produce and test different designs of soft robots and optimize their morphological and material parameters.
3.2. Actuation
| Reference | Robot | Biomimicry | Actuation | Swimming | Compliance |
|---|---|---|---|---|---|
| [37][26] | Multi-Joint Fish | Carangiform Fish | Electric Actuators (Servomotors) | BCF Undulation | Medium |
| [69,70][58][59] | Biomimetic Fish | Fish | IPMC | BCF/MPF Oscillation | Medium |
| [40,59,63][29][48][52] | SoFi | Fish | FEA (Pneumatic/Hydraulic) | BCF Undulation | High |
| [41][30] | Stingray Robot | Stingray | Electric Actuators (Servomotors) | MPF Undulation | Medium |
| [51][40] | Octopus Arm | Octopus | Motor-driven Cables | Crawling | High |
| [72][61] | Octopus Arm | Octopus | Motor-Driven Cables/SMA Springs | - | High |
| [76][65] | Octopus Robot | Octopus | Motor-Driven Cables/SMA | Crawling | Medium |
| [66][55] | Cuttlefish Robot | Cuttlefish | DEA | Jet Propulsion | Medium |
| [74][63] | Robojelly | Jellyfish | SMA | Propulsion | High |
| [61][50] | Octobot | Octopus | FEA (Chemical Reaction) | - | High |
| [64][53] | Morphing Underwater Walking Robot | - | FEA (Hydraulic) | Walking/Crawling | Medium |
| [67][56] | Jellyfish-Inspired Soft Robot | Jellyfish | DEA | Propulsion | High |
| [69][58] | Robotic Manta Ray | Manta Ray | IPMC | MPF Undulation | Medium |
| [75][64] | Micro Biomimetic Manta Ray | Manta Ray | SMA | MPF Undulation | Medium |
| [71][60] | Starfish Robot | Starfish | SMA Wires | Propulsion | High |
| [77][66] | Starfish-Like Soft Robot | Starfish | SMA | Crawling | High |
| [78][67] | RoboScallop | Scallop | FEA | Jet Propulsion | Medium |
| [79][68] | Eel-like Robot | Leptocephalus (Eel Larva) | Fluid Electrode DEA (FEDEA) | BCF Undulation | High |
| [80][69] | Morphing Limb Amphibious Turtle Robot | Turtle/Tortoise | Variable Stiffness Material-pneumatic Actuators | Drag-induced Swimming/Walking | Medium |
| [81][70] | FinRay Robotic Jellyfish | Jellyfish | FinRay Actuators driven with Servomotors | Propulsion | Medium |
| [82][71] | PATRICK: Brittle Star-Inspired Soft Robot | Brittle Star | SMA Wires | Crawling | High |
| [83][72] | Soft Underwater Starfish | Starfish | Servo-driven Tendon Wires | Propulsion | High |
3.3. Modeling
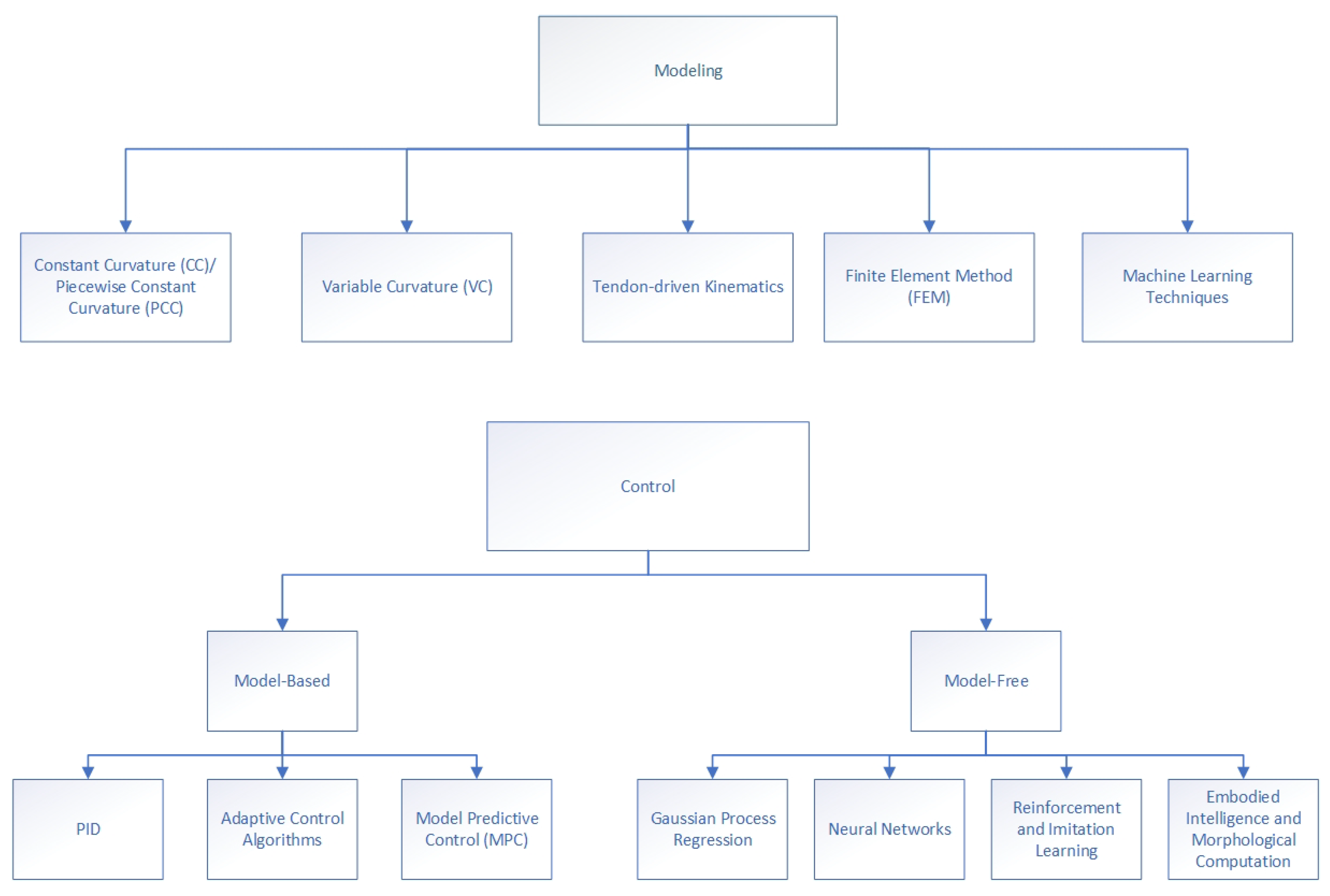
3.4. Control
4. Prospective Directions
References
- Chutia, S.; Kakoty, N.M.; Deka, D. A review of underwater robotics, navigation, sensing techniques and applications. Proc. Adv. Robot. 2017, 8, 1–6.
- Aracri, S.; Giorgio-Serchi, F.; Suaria, G.; Sayed, M.E.; Nemitz, M.P.; Mahon, S.; Stokes, A.A. Soft robots for ocean exploration and offshore operations: A perspective. Soft Robot. 2021, 8, 625–639.
- Sivčev, S.; Coleman, J.; Omerdić, E.; Dooly, G.; Toal, D. Underwater manipulators: A review. Ocean. Eng. 2018, 163, 431–450.
- Christ, R.D.; Wernli, R.L., Sr. The ROV Manual: A User Guide for Remotely Operated Vehicles; Butterworth-Heinemann: Oxford, UK, 2013.
- Di Vito, D.; De Palma, D.; Simetti, E.; Indiveri, G.; Antonelli, G. Experimental validation of the modeling and control of a multibody underwater vehicle manipulator system for sea mining exploration. J. Field Robot. 2021, 38, 171–191.
- Jones, D.O. Using existing industrial remotely operated vehicles for deep-sea science. Zool. Scr. 2009, 38, 41–47.
- Sfakiotakis, M.; Lane, D.M.; Davies, J.B.C. Review of fish swimming modes for aquatic locomotion. IEEE J. Ocean. Eng. 1999, 24, 237–252.
- Hermes, M.; Ishida, M.; Luhar, M.; Tolley, M.T. Bioinspired Shape-Changing Soft Robots for Underwater Locomotion: Actuation and Optimization for Crawling and Swimming. In Bioinspired Sensing, Actuation, and Control in Underwater Soft Robotic Systems; Springer: Berlin/Heidelberg, Germany, 2021; pp. 7–39.
- Cano-Barbacil, C.; Radinger, J.; Argudo, M.; Rubio-Gracia, F.; Vila-Gispert, A.; García-Berthou, E. Key factors explaining critical swimming speed in freshwater fish: A review and statistical analysis for Iberian species. Sci. Rep. 2020, 10, 1–12.
- Palstra, A.P.; Kals, J.; Böhm, T.; Bastiaansen, J.W.; Komen, H. Swimming performance and oxygen consumption as non-lethal indicators of production traits in Atlantic salmon and gilthead seabream. Front. Physiol. 2020, 11, 759.
- Videler, J.; Wardle, C. Fish swimming stride by stride: Speed limits and endurance. Rev. Fish Biol. Fish. 1991, 1, 23–40.
- Bainbridge, R. The speed of swimming of fish as related to size and to the frequency and amplitude of the tail beat. J. Exp. Biol. 1958, 35, 109–133.
- Zhu, J.; White, C.; Wainwright, D.K.; Di Santo, V.; Lauder, G.V.; Bart-Smith, H. Tuna robotics: A high-frequency experimental platform exploring the performance space of swimming fishes. Sci. Robot. 2019, 4, eaax4615.
- Chen, B.; Jiang, H. Swimming performance of a tensegrity robotic fish. Soft Robot. 2019, 6, 520–531.
- Zhao, W.; Ming, A.; Shimojo, M. Development of high-performance soft robotic fish by numerical coupling analysis. Appl. Bionics Biomech. 2018, 2018.
- Li, K.; Jiang, H.; Wang, S.; Yu, J. A soft robotic fish with variable-stiffness decoupled mechanisms. J. Bionic Eng. 2018, 15, 599–609.
- Verma, A. Status of animal phyla in different kingdom systems of biological classification. Int. J. Biol. Innov. 2020, 2, 149–154.
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521, 467–475.
- Trivedi, D.; Rahn, C.D.; Kier, W.M.; Walker, I.D. Soft robotics: Biological inspiration, state of the art, and future research. Appl. Bionics Biomech. 2008, 5, 99–117.
- Walker, I.D. Continuous backbone “continuum” robot manipulators. Int. Sch. Res. Not. 2013, 2013.
- Hannan, M.W.; Walker, I.D. Kinematics and the implementation of an elephant’s trunk manipulator and other continuum style robots. J. Robot. Syst. 2003, 20, 45–63.
- Hannan, M.W.; Walker, I.D. Analysis and experiments with an elephant’s trunk robot. Adv. Robot. 2001, 15, 847–858.
- Camarillo, D.B.; Carlson, C.R.; Salisbury, J.K. Configuration tracking for continuum manipulators with coupled tendon drive. IEEE Trans. Robot. 2009, 25, 798–808.
- Barrett, D.S. Propulsive Efficiency of a Flexible Hull Underwater Vehicle. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1996.
- Anderson, J.M.; Chhabra, N.K. Maneuvering and stability performance of a robotic tuna. Integr. Comp. Biol. 2002, 42, 118–126.
- Liu, J.; Hu, H. Biological inspiration: From carangiform fish to multi-joint robotic fish. J. Bionic Eng. 2010, 7, 35–48.
- Clapham, R.J.; Hu, H. iSplash-I: High performance swimming motion of a carangiform robotic fish with full-body coordination. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 322–327.
- Mazumdar, A.; Alvarado, P.V.Y.; Youcef-Toumi, K. Maneuverability of a robotic tuna with compliant body. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 683–688.
- Katzschmann, R.K.; DelPreto, J.; MacCurdy, R.; Rus, D. Exploration of underwater life with an acoustically controlled soft robotic fish. Sci. Robot. 2018, 3, eaar3449.
- Cloitre, A.; Subramaniam, V.; Patrikalakis, N.; Valdivia y Alvarado, P. Design and control of a field deployable batoid robot. In Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 4–27 June 2012; pp. 707–712.
- Chen, F.; Wang, M.Y. Design optimization of soft robots: A review of the state of the art. IEEE Robot. Autom. Mag. 2020, 27, 27–43.
- Lipson, H. Challenges and opportunities for design, simulation, and fabrication of soft robots. Soft Robot. 2014, 1, 21–27.
- Hiller, J.; Lipson, H. Automatic design and manufacture of soft robots. IEEE Trans. Robot. 2011, 28, 457–466.
- Talamini, J.; Medvet, E.; Nichele, S. Criticality-Driven Evolution of Adaptable Morphologies of Voxel-Based Soft-Robots. Front. Robot. AI 2021, 8, 172.
- Van Diepen, M.; Shea, K. A spatial grammar method for the computational design synthesis of virtual soft locomotion robots. J. Mech. Des. 2019, 141, 101402.
- Ma, P.; Du, T.; Zhang, J.Z.; Wu, K.; Spielberg, A.; Katzschmann, R.K.; Matusik, W. DiffAqua: A Differentiable Computational Design Pipeline for Soft Underwater Swimmers with Shape Interpolation. arXiv 2021, arXiv:2104.00837.
- Walker, S.; Yirmibeşoğlu, O.; Daalkhaijav, U.; Mengüç, Y. Additive manufacturing of soft robots. In Robotic Systems and Autonomous Platforms; Elsevier: Amsterdam, The Netherlands, 2019; pp. 335–359.
- Stano, G.; Percoco, G. Additive manufacturing aimed to soft robots fabrication: A review. Extrem. Mech. Lett. 2021, 42, 101079.
- Coyle, S.; Majidi, C.; LeDuc, P.; Hsia, K.J. Bio-inspired soft robotics: Material selection, actuation, and design. Extrem. Mech. Lett. 2018, 22, 51–59.
- Calisti, M.; Giorelli, M.; Levy, G.; Mazzolai, B.; Hochner, B.; Laschi, C.; Dario, P. An octopus-bioinspired solution to movement and manipulation for soft robots. Bioinspiration Biomim. 2011, 6, 036002.
- Polygerinos, P.; Correll, N.; Morin, S.A.; Mosadegh, B.; Onal, C.D.; Petersen, K.; Cianchetti, M.; Tolley, M.T.; Shepherd, R.F. Soft robotics: Review of fluid-driven intrinsically soft devices; manufacturing, sensing, control, and applications in human-robot interaction. Adv. Eng. Mater. 2017, 19, 1700016.
- Chou, C.P.; Hannaford, B. Measurement and modeling of McKibben pneumatic artificial muscles. IEEE Trans. Robot. Autom. 1996, 12, 90–102.
- Tondu, B.; Lopez, P. Modeling and control of McKibben artificial muscle robot actuators. IEEE Control Syst. Mag. 2000, 20, 15–38.
- Shepherd, R.F.; Ilievski, F.; Choi, W.; Morin, S.A.; Stokes, A.A.; Mazzeo, A.D.; Chen, X.; Wang, M.; Whitesides, G.M. Multigait soft robot. Proc. Natl. Acad. Sci. USA 2011, 108, 20400–20403.
- Marchese, A.D.; Komorowski, K.; Onal, C.D.; Rus, D. Design and control of a soft and continuously deformable 2d robotic manipulation system. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 2189–2196.
- TolleyMichael, T.; ShepherdRobert, F.; GallowayKevin, C.; WoodRobert, J.; WhitesidesGeorge, M. A resilient, untethered soft robot. Soft Robot. 2014, 1.
- Marchese, A.D.; Onal, C.D.; Rus, D. Towards a self-contained soft robotic fish: On-board pressure generation and embedded electro-permanent magnet valves. In Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2013; pp. 41–54.
- Marchese, A.D.; Onal, C.D.; Rus, D. Autonomous soft robotic fish capable of escape maneuvers using fluidic elastomer actuators. Soft Robot. 2014, 1, 75–87.
- Onal, C.D.; Chen, X.; Whitesides, G.M.; Rus, D. Soft mobile robots with on-board chemical pressure generation. In Robotics Research; Springer: Berlin/Heidelberg, Germany, 2017; pp. 525–540.
- Wehner, M.; Truby, R.L.; Fitzgerald, D.J.; Mosadegh, B.; Whitesides, G.M.; Lewis, J.A.; Wood, R.J. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature 2016, 536, 451–455.
- Katzschmann, R.K.; De Maille, A.; Dorhout, D.L.; Rus, D. Cyclic hydraulic actuation for soft robotic devices. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 3048–3055.
- Katzschmann, R.K.; Marchese, A.D.; Rus, D. Hydraulic autonomous soft robotic fish for 3D swimming. In Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 405–420.
- Ishida, M.; Drotman, D.; Shih, B.; Hermes, M.; Luhar, M.; Tolley, M.T. Morphing structure for changing hydrodynamic characteristics of a soft underwater walking robot. IEEE Robot. Autom. Lett. 2019, 4, 4163–4169.
- Guo, Y.; Liu, L.; Liu, Y.; Leng, J. Review of Dielectric Elastomer Actuators and Their Applications in Soft Robots. Adv. Intell. Syst. 2021, 3, 2000282.
- Yang, T.; Xiao, Y.; Zhang, Z.; Liang, Y.; Li, G.; Zhang, M.; Li, S.; Wong, T.W.; Wang, Y.; Li, T.; et al. A soft artificial muscle driven robot with reinforcement learning. Sci. Rep. 2018, 8, 14518.
- Christianson, C.; Bayag, C.; Li, G.; Jadhav, S.; Giri, A.; Agba, C.; Li, T.; Tolley, M.T. Jellyfish-inspired soft robot driven by fluid electrode dielectric organic robotic actuators. Front. Robot. AI 2019, 6, 126.
- Chen, Z.; Um, T.I.; Bart-Smith, H. Bio-inspired robotic manta ray powered by ionic polymer–metal composite artificial muscles. Int. J. Smart Nano Mater. 2012, 3, 296–308.
- Yang, T.; Chen, Z. Development of 2D maneuverable robotic fish propelled by multiple ionic polymer-metal composite artificial fins. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; pp. 255–260.
- Ye, Z.; Hou, P.; Chen, Z. 2D maneuverable robotic fish propelled by multiple ionic polymer–metal composite artificial fins. Int. J. Intell. Robot. Appl. 2017, 1, 195–208.
- Jin, H.; Dong, E.; Alici, G.; Mao, S.; Min, X.; Liu, C.; Low, K.; Yang, J. A starfish robot based on soft and smart modular structure (SMS) actuated by SMA wires. Bioinspiration Biomim. 2016, 11, 056012.
- Laschi, C.; Cianchetti, M.; Mazzolai, B.; Margheri, L.; Follador, M.; Dario, P. Soft robot arm inspired by the octopus. Adv. Robot. 2012, 26, 709–727.
- Chu, W.S.; Lee, K.T.; Song, S.H.; Han, M.W.; Lee, J.Y.; Kim, H.S.; Kim, M.S.; Park, Y.J.; Cho, K.J.; Ahn, S.H. Review of biomimetic underwater robots using smart actuators. Int. J. Precis. Eng. Manuf. 2012, 13, 1281–1292.
- Villanueva, A.; Smith, C.; Priya, S. A biomimetic robotic jellyfish (Robojelly) actuated by shape memory alloy composite actuators. Bioinspiration Biomim. 2011, 6, 036004.
- Wang, Z.; Wang, Y.; Li, J.; Hang, G. A micro biomimetic manta ray robot fish actuated by SMA. In Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics (ROBIO), Guilin, China, 19–23 December 2009; pp. 1809–1813.
- Cianchetti, M.; Calisti, M.; Margheri, L.; Kuba, M.; Laschi, C. Bioinspired locomotion and grasping in water: The soft eight-arm OCTOPUS robot. Bioinspiration Biomim. 2015, 10, 035003.
- Mao, S.; Dong, E.; Jin, H.; Xu, M.; Zhang, S.; Yang, J.; Low, K.H. Gait study and pattern generation of a starfish-like soft robot with flexible rays actuated by SMAs. J. Bionic Eng. 2014, 11, 400–411.
- Robertson, M.A.; Efremov, F.; Paik, J. RoboScallop: A bivalve inspired swimming robot. IEEE Robot. Autom. Lett. 2019, 4, 2078–2085.
- Christianson, C.; Goldberg, N.N.; Deheyn, D.D.; Cai, S.; Tolley, M.T. Translucent soft robots driven by frameless fluid electrode dielectric elastomer actuators. Sci. Robot. 2018, 3, eaat1893.
- Baines, R.L.; Booth, J.W.; Fish, F.E.; Kramer-Bottiglio, R. Toward a bio-inspired variable-stiffness morphing limb for amphibious robot locomotion. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 704–710.
- Gatto, V.L.; Rossiter, J.M.; Hauser, H. Robotic Jellyfish Actuated by Soft FinRay Effect Structured Tentacles. In Proceedings of the 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), New Haven, CT, USA, 15 May–15 July 2020; pp. 144–149.
- Patterson, Z.J.; Sabelhaus, A.P.; Chin, K.; Hellebrekers, T.; Majidi, C. An Untethered Brittle Star-Inspired Soft Robot for Closed-Loop Underwater Locomotion. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2020; pp. 8758–8764.
- Du, T.; Hughes, J.; Wah, S.; Matusik, W.; Rus, D. Underwater Soft Robot Modeling and Control With Differentiable Simulation. IEEE Robot. Autom. Lett. 2021, 6, 4994–5001.
- Webster, R.J., III; Jones, B.A. Design and kinematic modeling of constant curvature continuum robots: A review. Int. J. Robot. Res. 2010, 29, 1661–1683.
- Gravagne, I.A.; Rahn, C.D.; Walker, I.D. Large deflection dynamics and control for planar continuum robots. IEEE/ASME Trans. Mechatron. 2003, 8, 299–307.
- Jones, B.A.; Walker, I.D. Kinematics for multisection continuum robots. IEEE Trans. Robot. 2006, 22, 43–55.
- Mahl, T.; Mayer, A.E.; Hildebrandt, A.; Sawodny, O. A variable curvature modeling approach for kinematic control of continuum manipulators. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 4945–4950.
- Mahl, T.; Hildebrandt, A.; Sawodny, O. A variable curvature continuum kinematics for kinematic control of the bionic handling assistant. IEEE Trans. Robot. 2014, 30, 935–949.
- Camarillo, D.B.; Carlson, C.R.; Salisbury, J.K. Task-space control of continuum manipulators with coupled tendon drive. In Experimental Robotics; Springer: Berlin/Heidelberg, Germany, 2009; pp. 271–280.
- Penning, R.S.; Jung, J.; Ferrier, N.J.; Zinn, M.R. An evaluation of closed-loop control options for continuum manipulators. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 5392–5397.
- George Thuruthel, T.; Ansari, Y.; Falotico, E.; Laschi, C. Control strategies for soft robotic manipulators: A survey. Soft Robot. 2018, 5, 149–163.
- Wang, H.; Chen, W.; Yu, X.; Deng, T.; Wang, X.; Pfeifer, R. Visual servo control of cable-driven soft robotic manipulator. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 57–62.
- Katzschmann, R.K.; Della Santina, C.; Toshimitsu, Y.; Bicchi, A.; Rus, D. Dynamic motion control of multi-segment soft robots using piecewise constant curvature matched with an augmented rigid body model. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 454–461.
- Till, J.; Bryson, C.E.; Chung, S.; Orekhov, A.; Rucker, D.C. Efficient computation of multiple coupled Cosserat rod models for real-time simulation and control of parallel continuum manipulators. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 6–30 May 2015; pp. 5067–5074.
- Lang, H.; Linn, J.; Arnold, M. Multi-body dynamics simulation of geometrically exact Cosserat rods. Multibody Syst. Dyn. 2011, 25, 285–312.
- Xavier, M.S.; Fleming, A.J.; Yong, Y.K. Finite Element Modeling of Soft Fluidic Actuators: Overview and Recent Developments. Adv. Intell. Syst. 2021, 3, 2000187.
- Zhang, Z.; Bieze, T.M.; Dequidt, J.; Kruszewski, A.; Duriez, C. Visual servoing control of soft robots based on finite element model. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 2895–2901.
- Duriez, C. Control of elastic soft robots based on real-time finite element method. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 3982–3987.
- Largilliere, F.; Verona, V.; Coevoet, E.; Sanz-Lopez, M.; Dequidt, J.; Duriez, C. Real-time control of soft-robots using asynchronous finite element modeling. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 2550–2555.
- Runge, G.; Wiese, M.; Günther, L.; Raatz, A. A framework for the kinematic modeling of soft material robots combining finite element analysis and piecewise constant curvature kinematics. In Proceedings of the 2017 3rd International Conference on Control, Automation and Robotics (ICCAR), Nagoya, Japan, 24–26 April 2017; pp. 7–14.
- Chenevier, J.; González, D.; Aguado, J.V.; Chinesta, F.; Cueto, E. Reduced-order modeling of soft robots. PLoS ONE 2018, 13, e0192052.
- Goury, O.; Duriez, C. Fast, generic, and reliable control and simulation of soft robots using model order reduction. IEEE Trans. Robot. 2018, 34, 1565–1576.
- Katzschmann, R.K.; Thieffry, M.; Goury, O.; Kruszewski, A.; Guerra, T.M.; Duriez, C.; Rus, D. Dynamically closed-loop controlled soft robotic arm using a reduced order finite element model with state observer. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Korea, 14–18 April 2019; pp. 717–724.
- Thieffry, M.; Kruszewski, A.; Duriez, C.; Guerra, T.M. Control design for soft robots based on reduced-order model. IEEE Robot. Autom. Lett. 2018, 4, 25–32.
- Huang, W.; Huang, X.; Majidi, C.; Jawed, M.K. Dynamic simulation of articulated soft robots. Nat. Commun. 2020, 11, 1–9.
- Calisti, M.; Corucci, F.; Arienti, A.; Laschi, C. Dynamics of underwater legged locomotion: Modeling and experiments on an octopus-inspired robot. Bioinspiration Biomim. 2015, 10, 046012.
- George Thuruthel, T.; Renda, F.; Iida, F. First-order dynamic modeling and control of soft robots. Front. Robot. AI 2020, 7, 95.
- Kim, D.; Kim, S.H.; Kim, T.; Kang, B.B.; Lee, M.; Park, W.; Ku, S.; Kim, D.; Kwon, J.; Lee, H.; et al. Review of machine learning methods in soft robotics. PLoS ONE 2021, 16, e0246102.
- Soliman, M.; Mousa, M.A.; Saleh, M.A.; Elsamanty, M.; Radwan, A.G. Modelling and implementation of soft bio-mimetic turtle using echo state network and soft pneumatic actuators. Sci. Rep. 2021, 11, 1–11.
- Melingui, A.; Merzouki, R.; Mbede, J.B.; Escande, C.; Benoudjit, N. Neural networks based approach for inverse kinematic modeling of a compact bionic handling assistant trunk. In Proceedings of the 2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE), Istanbul, Turkey, 1–4 December 2014; pp. 1239–1244.
- Runge, G.; Wiese, M.; Raatz, A. FEM-based training of artificial neural networks for modular soft robots. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics (ROBIO), Macau, China, 5–8 December 2017; pp. 385–392.
- Giorelli, M.; Renda, F.; Calisti, M.; Arienti, A.; Ferri, G.; Laschi, C. Neural network and jacobian method for solving the inverse statics of a cable-driven soft arm with nonconstant curvature. IEEE Trans. Robot. 2015, 31, 823–834.
- Thuruthel, T.G.; Shih, B.; Laschi, C.; Tolley, M.T. Soft robot perception using embedded soft sensors and recurrent neural networks. Sci. Robot. 2019, 4, eaav1488.
- Zhang, Y.; Gao, J.; Yang, H.; Hao, L. A novel hysteresis modelling method with improved generalization capability for pneumatic artificial muscles. Smart Mater. Struct. 2019, 28, 105014.
- Soliman, M.; Saleh, M.A.; Mousa, M.A.; Elsamanty, M.; Radwan, A.G. Theoretical and experimental investigation study of data driven work envelope modelling for 3D printed soft pneumatic actuators. Sens. Actuators A Phys. 2021, 331, 112978.
- Thuruthel, T.G.; Falotico, E.; Renda, F.; Laschi, C. Learning dynamic models for open loop predictive control of soft robotic manipulators. Bioinspiration Biomim. 2017, 12, 066003.
- Gillespie, M.T.; Best, C.M.; Townsend, E.C.; Wingate, D.; Killpack, M.D. Learning nonlinear dynamic models of soft robots for model predictive control with neural networks. In Proceedings of the 2018 IEEE International Conference on Soft Robotics (RoboSoft), Livorno, Italy, 24–28 April 2018; pp. 39–45.
- Thuruthel, T.G.; Falotico, E.; Manti, M.; Laschi, C. Stable open loop control of soft robotic manipulators. IEEE Robot. Autom. Lett. 2018, 3, 1292–1298.
- Boyer, F.; Porez, M.; Khalil, W. Macro-continuous computed torque algorithm for a three-dimensional eel-like robot. IEEE Trans. Robot. 2006, 22, 763–775.
- Franco, E.; Garriga-Casanovas, A. Energy-shaping control of soft continuum manipulators with in-plane disturbances. Int. J. Robot. Res. 2021, 40, 236–255.
- Hyatt, P.; Johnson, C.C.; Killpack, M.D. Model reference predictive adaptive control for large-scale soft robots. Front. Robot. AI 2020, 7, 132.
- Diteesawat, R.S.; Fishman, A.; Helps, T.; Taghavi, M.; Rossiter, J. Closed-loop Control of Electro-ribbon Acutators. Front. Robot. AI 2020, 7, 144.
- Schiller, L.; Seibel, A.; Schlattmann, J. A gait pattern generator for closed-loop position control of a soft walking robot. Front. Robot. AI 2020, 7, 87.
- Bhagat, S.; Banerjee, H.; Ho Tse, Z.T.; Ren, H. Deep reinforcement learning for soft, flexible robots: Brief review with impending challenges. Robotics 2019, 8, 4.
- Zhang, H.; Cao, R.; Zilberstein, S.; Wu, F.; Chen, X. Toward effective soft robot control via reinforcement learning. In International Conference on Intelligent Robotics and Applications; Springer: Berlin/Heidelberg, Germany, 2017; pp. 173–184.
- Soter, G.; Conn, A.; Hauser, H.; Rossiter, J. Bodily aware soft robots: Integration of proprioceptive and exteroceptive sensors. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 2448–2453.
- Shih, B.; Shah, D.; Li, J.; Thuruthel, T.G.; Park, Y.L.; Iida, F.; Bao, Z.; Kramer-Bottiglio, R.; Tolley, M.T. Electronic skins and machine learning for intelligent soft robots. Sci. Robot. 2020, 5, eaaz9239.
- Zambrano, D.; Cianchetti, M.; Laschi, C.; Hauser, H.; Füchslin, R.; Pfeifer, R. The Morphological Computation Principles as a New Paradigm for ROBOTIC design. Opinions and Outlooks on Morphological Computation. 2014, pp. 214–225. Available online: https://philpapers.org/rec/HAUOAO (accessed on 1 January 2022).
- Hauser, H.; Ijspeert, A.J.; Füchslin, R.M.; Pfeifer, R.; Maass, W. Towards a theoretical foundation for morphological computation with compliant bodies. Biol. Cybern. 2011, 105, 355–370.
- Hauser, H.; Ijspeert, A.J.; Füchslin, R.M.; Pfeifer, R.; Maass, W. The role of feedback in morphological computation with compliant bodies. Biol. Cybern. 2012, 106, 595–613.