Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 1 by Anselme Muzirafuti and Version 2 by Conner Chen.
The most common role of drones in agriculture is to assess and monitor crops. For this, remote sensing is carried out, but this task is not enough when agricultural applications become more widespread. For this, autonomous mobile robots such as drones and other UAVs with technologically different features are designed for various agricultural purposes.
- autonomous robots
- smart agriculture
- Remote sensing
1. Unmanned Aerial Robots’ Applications in Agriculture
IoT and similar technologies such as WSN, which have become popular in recent years, are used to meet the needs in the agriculture fields. Along with the IoT, the widespread use of autonomous robots such as Unmanned Aerial Robots (UAVs) increases productivity in agriculture. In recent years, studies related to this subject have gained acceleration [1][2][3][4][21,22,23,24]. In [5][25], the authors used UAVs to detect possible drainage pipes. Often, farmers need to repair or construct drain lines to efficiently remove water from soil. Therefore, in this study, they wanted to increase resource consumption and productivity in agriculture by focusing on this issue. In [6][26], the combined application of UAV and Unmanned Ground Robot (UGV) was proposed to monitor and manage crops. The authors proposed a system that can periodically monitor the condition of crops, capture multiple images of them, and determine the state of the crops. In addition to many UAV-based studies and products, recently, the concepts of IoT and autonomous robots have begun to be presented together. In this way, the data detected by the UAVs or each autonomous robot reach the place where they need to be sent instantly, the necessary actions can be taken on this data, and it can quickly provide a decision mechanism to the farmer or other technological devices. For example, in [7][27], the authors presented a farm monitoring system via UAV, IoT, and Long-Range Wide Area Network (LoRAWAN) technologies for efficient resource management and data delivery. In this regard, they monitored water quality. In [8][28], the authors proposed a new model to minimize the post-disaster inspection cost to serve a disaster-affected area. In this study, battery charging costs, service costs, drone hovering, turning, acceleration, cruise, and deceleration costs were considered. In this regard, the authors used two heuristics (not meta-heuristics) algorithms, but it was not possible to avoid the fundamental problems of heuristics [9][19]. In [10][29], the study aimed to deliver to a number of customers by UAVs, namely drones. Here, it focused on three issues. One was the launch points of the drones, the second was the launch points of the customers, and the third was the distance between the customer and the drone. The proposed method goal was to minimize the total operational cost, including an explicit calculation of the energy consumption of the drone as a function of the drone speed.
The most common role of drones in agriculture is to assess and monitor crops. For this, remote sensing is carried out, but this task is not enough when agricultural applications become more widespread. For this, autonomous mobile robots such as drones and other UAVs with technologically different features are designed for various agricultural purposes. In [11][30], the authors used satellite images to crop mapping. They used the remote sensing feature and utilized advantages of combined radar data and optical images to identify the type of crops. The authors claim that this combination provides an increased chance of examining details and provides more reliable information compared to a single-sensor classification method. We can generally categorize UAV/drone-based agricultural applications into three categories: Monitoring Applications, (b) Spraying Applications, and (c) Multi-robots Applications. In the first category, crops are tracked, and certain appropriate information and vegetation indices are extracted. For this, it is necessary to provide the imaging data that are processed later. Thus, we can identify problem areas in the crop that suffer from various diseases and pests. The data received by UAVs sensors can be characterized based on their spectral, spatial, and temporal properties. The selection of suitable sensors and data depends on the nature of their applications. There are many studies in the literature related to this [12][13][14][31,32,33]. Most studies in the second category have focused on applications that can spray pesticides and fertilizers in appropriate and correct amounts. Most of the papers reviewed install a spray device and take into account various conditions that can affect this process, such as weather [15][16][17][34,35,36]. We should not forget that these agricultural chemical products can cause various problems such as environmental disasters and human diseases such as cancer. Currently, most of the existing studies in the literature generally focus on a single autonomous, mobile robot performing a monitoring operation. For example, in some cases such as large crops, a single mobile device (e.g., UAV) cannot complete the monitoring process as it is characterized by limited power sources (limited battery). On the contrary, a multi-robot application can overcome this difficulty by dividing the area into multiple sub-areas corresponding to the number of UAVs/drones [18][19][20][37,38,39]. In addition, different purposes and applications are carried out on a single drone. However, the need for more than one mobile robot to work is increasing day by day. In particular, parallel processing is very important in terms of performance and process speed. In this regard, one of the most important issues is that these autonomous mobile robots can work together as soon as possible and use fewer resources without colliding with each other. The situation becomes even more difficult, especially in large-scale agricultural land, which consists of various barriers. Thus, the problem of path planning seems to be quite important, and an efficient mechanism can be used in many various agricultural applications; it can also be coded and embedded with different hardware devices. Therefore, in the next subsection, the topic of three-dimensional path planning in the literature is discussed.
2. Path Planning in Agricultural Applications
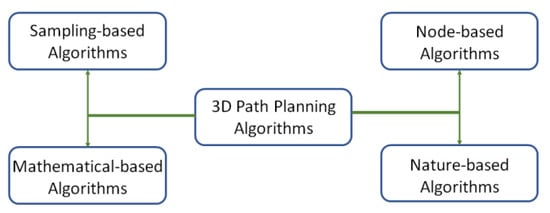
It is very important that autonomous robots used in smart agriculture perform their duties efficiently and that resources are used efficiently. In this regard, a vital issue is that these robots do their tasks with the most optimum mechanism. Therefore, it is necessary to focus on the NP-hard type of 3D path planning problem. A general classification of 3D path planning consists of four types, as shown in Figure 1. These types are sampling-based algorithms [21][40], node-based algorithms [22][41], mathematical-based algorithms [23][42], and nature-based algorithms [24][43]. The methods in the first three categories suffer from high time complexity and local minima trap, especially when mobile robots face multiple constraints when planning a path. Metaheuristic algorithms, a set of nature-inspired algorithms, are the fourth category in this taxonomy that imitate natural, biological, interactive behaviors or physical events [25][26][44,45]. These methods try to find an almost optimal path by eliminating the process of creating complex environment models based on stochastic approaches. The stochastic approaches can be efficient and fast in solving large and complex optimization problems, especially in non-differentiable, multi-objective, and multimodal problems [27][28][20,46].
Finding the best shortest path entails some problems such as the existence of many possible obstacles in its route. In addition, this path should be smooth without sharp turns and must consider movement restrictions. These problems may be even more cumbersome when considering large land areas and similar agricultural environments. Solution techniques in path planning algorithms for mobile autonomous mobile robots may include a visibility graph [31][48], probable road maps [32][49], and random exploring algorithms [33][50]. However, judging from the results of numerous studies in the literature, metaheuristic methods may be better overall [34][35][36][51,52,53]. Metaheuristic methods try to find an almost optimal path by eliminating the process of creating complex environment models based on stochastic approaches. These methods are among the most appropriate approaches to solve unifying and nonlinear global optimization problems [37][54]. Worth mentioning here is the No-Free-Lunch (NFL) [38][55] theorem. It asserts that there is no specific metaheuristic algorithm that provides the best solution for every optimization problem. This means that if one algorithm can solve a kind of problem effectively, then it may not be effective to solve another kind of problem. As such, there is a considerable demand to develop new metaheuristic algorithms that can be used in various problems.
As previously stated, the path planning problem has become popular in recent years and the metaheuristic algorithms can be the most appropriate solution for it, but in the literature, there are not many works that study agricultural lands for various purposes. Many agricultural studies in the literature have focused on issues such as the farmer’s income from harvest, the variety of land use, the type and amount of employment, labor productivity, biodiversity indices based on landscape ecological measures, and soil erosion [39][40][41][56,57,58]. In the literature, although there are some studies on path planning in agricultures [42][43][59,60], they have generally not focused either on 3D path planning or on the problem of having many obstacles in the real environment farmlands and how to detect them.
In [44][61], the authors addressed the coverage path problem in a particular region with many known obstacles for mobile robots in agriculture. The study proposed a practical method, considering the geometry properties and obstacles of the area. It used an obstacle avoidance mechanism to find a coverage path for agricultural drones. However, optimal pathfinding and its usability in a 3D space were not taken into account. Additionally, the complexity time and space of their proposed method are not efficient in comparison with metaheuristic-based algorithms. In [42][59], the authors showed the simulation results of an algorithm designed to autonomously perform the path planning process for UAVs in agricultural lands. The purpose of this study was to provide the appropriate conditions to automate the process and carry out further audit activities. The algorithm considers photogrammetric parameters such as ground sample distance (GSD) and overlap between photos. For this, image processing techniques were used. In [45][62], the authors used autonomously acting ground robots for various agricultural applications. They researched different applications for path planning techniques to various agricultural contexts and applied land coverage and point-to-point navigation techniques. They used the D* to find the optimal path in a partial environment. However, this method is not very efficient since it uses a node-based algorithm (D* algorithm), and it is also designed for 2D areas [46][63]. As mentioned before, among the 3D path planning methods, metaheuristics may be the most efficient method. In [47][64], the authors proposed a custom model to navigate semi-autonomous agricultural robots with trailer. However, the geometry features were considered in 2D. In addition, the authors did not focus on finding the optimal path. Therefore, mobile devices moving on the non-optimal path map may not be successful in using their resources efficiently.
In [48][65], the authors proposed a path planning method inspired by the Ant Colony Optimization (ACO) algorithm to multipoint measurements in potato ridge cultivation. However, the related method did not perform successfully in finding optimal paths and is also useful for 2D areas. It may be unlikely to be implemented on real robots due to the fact that they did not focus on the recognition of obstacles and the avoidance of mechanisms of them. In [40][57], three local search metaheuristic algorithms, which were simulated by annealing and tabu search references, were used to calculate annual crop planning with a new irrigation mechanism. The objective function of this study was to maximize the gross benefits associated with the allocation of crops. The authors claimed that the tabu search method gave the best results in comparisons. In [49][66], an evolutionary algorithm was used for a complex strategic land use problem based on the management of a farming system. This study aimed to pursue a multi-purpose strategy that fulfilled spatial constraints in the 50-year planning management of the farm. Although the study is comprehensive, the metaheuristic method used and proposed may not be a very performant and efficient solution.