Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 2 by Jessie Wu and Version 1 by Yassine Yazid.
Unmanned aerial vehicles (UAVs) are becoming integrated into a wide range of modern IoT applications. The growing number of networked IoT devices generates a large amount of data. Therefore, flexible computing services are required to assess several issues related to processing time . Mobile Edge Computing solution integrating processing devices on UAVs promises to provide many facilities in various newly emerged IoT applications. This method is advantageous since it relies on powerful AI techniques.
- UAVs
- IoT
- AI
- Cloud Computing
- Edge Computing
- Mobile Edge Computing
1. UAVs Classification
Deploying a UAV network (known as swarms in IoT contexts) is becoming a practical and necessary requirement for many applications. Various UAVs are currently available on the market, with distinctive features such as supportable altitude, speed, and battery autonomy, for multiple applications. Generally, the selection of any UAV model should fulfill many of the criteria of the targeted application, such as QoS, energy capacity, environmental restrictions, and federal rules [18][1]. There are three types of UAVs: low-altitude platforms (LAPs), high-altitude platforms (HAPs), and satellites. Since this work focuses on UAV-enabled MEC, UAVs are described based on many aspects.
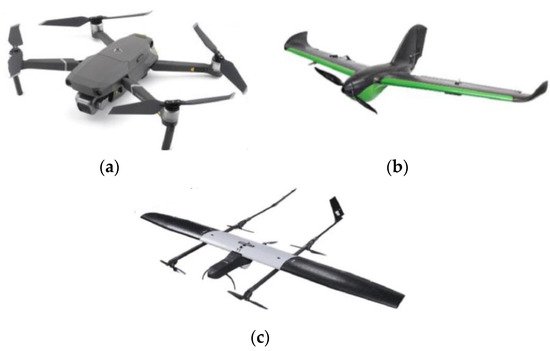
Figure 1 categorizes UAVs into the LAPs category based on their type, size, range, and type of rotors. Figure 2 shows the shape and form of three kinds of commercialized UAVs: a rotary-wing drone (Figure 2a), a fixed-wing drone (Figure 2b), and a fixed-wing hybrid VTOL UAV (Figure 2c).
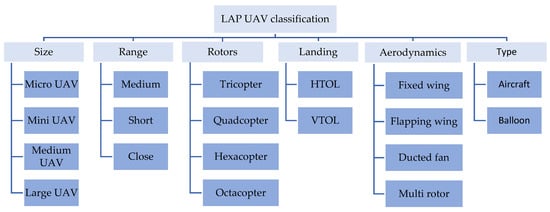
Figure 1. Classification of LAP UAVs.
Typically, UAVs present unique characteristics, being dynamic, agile, easy to repair, easy to deploy, and offering the potential to provide various measurements wherever and whenever required. They provide a low-cost alternative for collecting and providing information to intelligent systems that can undertake the necessary data analysis (e.g., real-time image or video analysis). UAVs will substantially promote the progress of farming, defense, insurance inspection, law enforcement, emergency assistance, pollution monitoring, disaster recovery, and package delivery.
The data are collected remotely through controllable devices installed on UAVs, each triggered via the platform. The collected data are processed locally onboard the UAVs or are offloaded to cloud servers, based on the required power. Deploying a practical UAV-based IoT framework requires an orchestrator platform that recognizes various contextual information about UAVs, such as flight trajectories, IoT equipment, and battery status.
Two main UAV communication networks exist ad-hoc UAV networks and UAV-assisted aided communication networks. The former is characterized by a flexible topology and self-organized architecture, while the latter’s main feature comprises flexible scheduling at the edge side of the network.
UAVs can collect data massively by being equipped with sensors of different sizes, forms, features, and capabilities. Many remote sensing devices for airborne and satellite platforms are now adopting miniature and low-cost versions for UAV platforms, such as multispectral, hyperspectral, short/medium-wave range cameras (e.g., thermal imaging camera), and light LiDAR. Table 1 gives a list of the sensors and cameras integrated with UAVs and their usefulness for monitoring various applications. The characteristics and specifications of each type differ according to specifications. For example, the RGB camera can be helpful for visual analysis, mapping and classifying objects and tracking animals and people. Moreover, UAVs with lightweight thermal infra-red sensors can deal with complex natural tracking such as monitoring volcanoes and forest fires, tracking animals, and hydrothermal scientific studies.
Table 1. Examples of UAV onboard sensors and cameras.
| Sensor/Camera | Utility | Ref. | |||
|---|---|---|---|---|---|
| References | |||||
| Task offloading | RL | Energy consumption, processing time, latency | [115] | [10] | |
| DRL | Energy consumption, latency, cost | [116] | [11] | ||
| GA | Energy consumption, latency | [117,118] | [12][13] | ||
| DL | Security, privacy, task prediction, and computation offloading | [119, | [14 | 120] | ][15] |
| FI | Execution time | [121] | [16] | ||
| Resources allocation | RL | Resources allocation, energy | [122,123] | [17][18] | |
| DRL | Latency, response time, resource utilization, energy consumption | [124,125] | [19][20] | ||
| GA | Energy consumption, latency | [126] | [21] | ||
| RL-ACO | Throughput | [123] | [18] | ||
| Joint optimization issue | RL | Security and privacy, energy consumption | [127] | [22] | |
| DRL | Cost, energy consumption, latency | [128] | [23] | ||
| GA | Energy consumption, makespan | [129] | [24] | ||
| DL | Energy consumption, cost | [130] | [25] | ||
| RL-ACO | Energy consumption | [131] | [26] | ||
| Security | RL | Security caching | [127] | [22] | |
| Path planning | RL | Path planning | [35,132,133] | [27][28][29] | |
| RGB Camera |
| [20] | [3] | ||
| UAV LiDAR |
| [21] | [4] | ||
| Hyperspectral sensors |
| [22] | [5] | ||
| Lightweight cameras |
| [23] | [6] | ||
| Lightweight thermal infra-red sensors |
| [24] | [7] |
2. UAV-Enabled MEC and Assisted MEC Based on AI
MEC is an effective method for overcoming time-constrained computing challenges in resource-constrained mobile IoT devices. The objective is to bring CC services closer to customers to minimize latency and backhaul network congestion. UAVs with storage units, processing, and communication capabilities can function as flying MEC servers at the IoT system’s edge. In this context, resource-constrained IoT devices may offload their computing activities, either partially or totally, to MEC-server-mounted UAVs through direct line-of-sight connectivity. Nevertheless, the system faces many challenges related to task prediction, UAV deployment, users’ association, signal processing, and joint resource allocation. Considering the EC architecture, UAVs with flexibility and mobility are likely to deliver decentralized solution perspectives significantly. The flying edge architecture is intended to improve the CC capabilities of latency-sensitive and real-time IoT applications. This enables computing offloading at the edge of IoT devices rather than centralized data centers, reducing communication latency and facilitating real-time decision-making and control. Since the IoT system operates with many end-devices, a large quantity of data is offloaded to the edge devices; this requires developing mechanisms that manage and exploit the data for various purposes, such as auto-maintenance, self-monitoring, and prediction. There is a considerable difference between EC devices and centralized cloud servers regarding their processing capacities and memory, limiting multiple AI technologies for data processing at the edge. Therefore, numerous criteria should be considered when incorporating any AI technique to profit from their robustness, due to memory capacity and energy consumption constraints [111][8]. EC delivers resources in a decentralized manner, allowing faster addressing of user demands than a regular CC, even with limited computational capability. Various challenges arise, such as task scheduling, resource allocation, and offloading, substantially influencing the overall performance. Nevertheless, most of the proposed solutions are characterized by non-convexity and complexity, as they enable continuous learning ability for the dynamic environment and make a real-time inference with low computational complexity. Applying AI to networking challenges has gained popularity over the past few decades. For instance, ML has been widely used in the networking domain due to its ability to interact with complex environments and make decisions. It may also provide eminent solutions to improve network performance in many subdomains, such as resource allocation, network traffic prediction and classification, congestion control, and routing [32][9].
In most UAV-enabled MEC architectures, a controller called the follow-me cloud (FMC) collects information about overall system states (i.e., users, UAVs, and MEC servers). This control unit is in charge of managing offloading activities using AI technologies. Figure 5 displays an example of a cloudlet mounted on a UAV for a UAV-assisted MEC system. The UAV receives offloaded tasks from an IoT device and sends the results back upon fulfillment of the task’s execution. Furthermore, the UAV could transport the received data to the nearest ground servers in case of complex processing requirements that overfit the onboard cloudlet’s capabilities. The system may contain a set of UAVs that serve a massive area of deployed IoT devices that include mobile phones, sensors, vehicles, and robots. The data generated by the users is analyzed and treated via onboard cloudlets with the help of the AI approach.
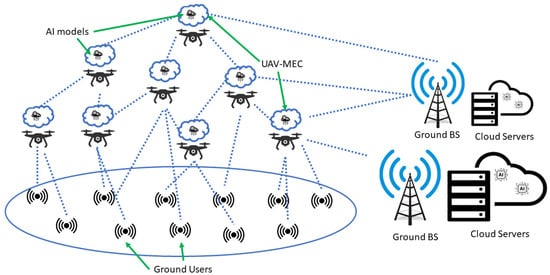
Figure 5. UAV-enabled MEC architecture.
As shown in Table 5, the DRL, DL, and GA can be utilized to solve task offloading challenges such as energy consumption limits, processing, and latency. Furthermore, for resource allocation management issues, the algorithms RL, DRL, GA, and RL-ACO might be utilized to regulate the energy consumption in UAVs and reduce the latency and reaction time. Moreover, the later algorithms, DE and ACO, can be applied to address joint optimization difficulties, whereas DL may enhance UAVs’ security and path planning performance.
Table 5. AI-based approaches used in UAV-enabled MEC.
| Addressed Issues | AI Approach | Metrics |
MEC networks should offer seamless connection, meet the QoS needs of many sensors, and handle a vast volume of data created by physical surroundings. AI approaches offering robust analysis, learning, optimizing, and intelligent recognition capabilities may be integrated into UAV-enabled MEC systems to intelligently carry out performance optimization, information discovery, advanced learning, structure organization, and complex decision-making. Relevant AI techniques include supervised learning, unsupervised learning, and reinforcement learning.
For instance, DRL does not require labeled training data for resource allocation. Thus, it may enhance the process of offloading choices based on various states of the channel environment. This results in reducing the energy bandwidth and computations. To that end, an MDP method was provided to reduce the delay, energy consumption, and bandwidth in UAV-assisted MEC by analyzing the instability of energy arrival, stochastic computation tasks that are provided by wireless users, and a time-varying channel state [112][30]. According to the authors of [113][31], UAV-assisted MEC-based DL and DRL would ease the development of next-generation communications. This is particularly true for joint optimization challenges to improve system efficiency. Furthermore, UAV communication will be incorporated with 6G networks, where IoT device mobility might lead to position uncertainty. In this case, DRL, as a hybrid of DL and RL, can offer decision-making solutions and optimize handover issues in real-time. This approach allows UAVs to move dynamically and in real-time while assuring and minimizing communication delay [114][32].
Authors in [134][33] have proved that the deep supervised learning (DSL) method minimizes the computation and offloading overheads and costs of mobile users in the MEC system. This technique allows terrestrial users to obtain an optimal offloading policy, with energy-saving and processing speed enhancement.
The authors of [91][34] have investigated the challenges associated with applying AI techniques to UAV-NOMA-MEC networks. They proposed an architecture that relies on AI-based approaches, particularly on federated learning and reinforcement learning. The proposed framework was dedicated to enabling terrestrial mobile users to offload their computational tasks simultaneously, intelligently, and flexibly, thus enhancing their connectivity and reducing their transmission latency and energy consumption.
The authors of [135][35] used RL and transfer learning algorithms to reduce the latency and energy consumption in UAV-enabled MEC networks. They proved that transfer learning, when combined with RL, could significantly enhance the system training performance when the users operated dynamically.
An optimization problem based on MDP was formulated by the authors of [35][27] to address UAV trajectory optimization in UAV-mounted MEC networks. The approach aimed to enhance the overall system QoS, maximize the long-term system reward, and meet the QoS constraint, including the computation tasks of mobile users. In [136][36], the authors have used the semi-Markov process and DRL-based algorithms to address the UAV-enabled MEC networks’ offloading decisions and resource management policies.
The authors of [137][37] have developed a platform known as a flying UAV MEC, in which UAVs are outfitted with computing resources and provide task-offloading services to users. The suggested architecture’s primary purpose was to maximize UAV aerial trajectory, user association, and resource allocation. The trajectory control method has been used to address the optimization issue, assisted by an RL-based technique. The results of this approach outperformed the results of the equivalent benchmark methods. Moreover, the authors of [138][38] formulated an ML-based novel framework to optimize UAV trajectories by estimating the user’s mobility data to find optimal initial UAV placement locations. The joint problem, consisting of UAVs trajectories and power control to improve the sum rate and maintain the data rate requirements of mobile users, was also addressed in the employment of a multi-agent Q-learning-based technique. A smart offloading based on the deep Q-learning approach was proposed by the authors of [139][39] to optimize performance in terms of the delay perceived by ground devices connected to the FANET, to enable MEC in the 5G field.
References
- Korchenko, A.G.; Illyash, O.S. The generalized classification of Unmanned Air Vehicles. In Proceedings of the 2013 IEEE 2nd International Conference Actual Problems of Unmanned Air Vehicles Developments Proceedings (APUAVD), Kiev, Ukraine, 15–17 October 2013; pp. 28–34.
- Chamola, V.; Kotesh, P.; Agarwal, A.; Naren; Gupta, N.; Guizani, M. A Comprehensive Review of Unmanned Aerial Vehicle Attacks and Neutralization Techniques. Ad Hoc Netw. 2021, 111, 102324.
- Guo, Y.; Yin, G.; Sun, H.; Wang, H.; Chen, S.; Senthilnath, J.; Wang, J.; Fu, Y. Scaling effects on chlorophyll content estimations with RGB camera mounted on a UAV platform using machine-learning methods. Sensors 2020, 20, 5130.
- Lin, Y.C.; Cheng, Y.T.; Zhou, T.; Ravi, R.; Hasheminasab, S.M.; Flatt, J.E.; Troy, C.; Habib, A. Evaluation of UAV LiDAR for mapping coastal environments. Remote Sens. 2019, 11, 2893.
- Miyoshi, G.T.; Arruda, S.; Osco, L.P.; Junior, M.; Gonçalves, D.N.; Imai, N.N. A Novel Deep Learning Method to Identify Single Tree Species in UAV-Based Hyperspectral Images. Remote Sens. 2020, 12, 1294.
- Cen, H.; Wan, L.; Zhu, J.; Li, Y.; Li, X.; Zhu, Y.; Weng, H. Dynamic monitoring of biomass of rice under different nitrogen treatments using a lightweight UAV with dual image—Frame snapshot cameras. Plant Methods 2019, 15, 32.
- Hill, A.C.; Laugier, E.J. Archaeological Remote Sensing Using Infrared (NIR) Imagery: A Case Study at the Enfield Shaker Village, New Hampshire. Remote Sens. 2020, 12, 690.
- Wang, X.; Han, Y.; Leung, V.C.M.; Niyato, D.; Yan, X.; Chen, X. Convergence of Edge Computing and Deep Learning: A Comprehensive Survey. IEEE Commun. Surv. Tutor. 2020, 22, 869–904.
- Erdelj, M.; Król, M.; Natalizio, E. Wireless Sensor Networks and Multi-UAV systems for natural disaster management. Comput. Netw. 2017, 124, 72–86.
- Xu, J.; Chen, L.; Ren, S. Online Learning for Offloading and Autoscaling in Energy Harvesting Mobile Edge Computing. IEEE Trans. Cogn. Commun. Netw. 2017, 3, 361–373.
- Wang, J.; Hu, J.; Min, G.; Zhan, W.; Ni, Q.; Georgalas, N. Computation Offloading in Multi-Access Edge Computing Using a Deep Sequential Model Based on Reinforcement Learning. IEEE Commun. Mag. 2019, 57, 64–69.
- Bozorgchenani, A.; Member, S.; Mashhadi, F.; Member, S. Multi-Objective Computation Sharing in Energy and Delay Constrained Mobile Edge Computing Environments. IEEE Trans. Mob. Comput. 2020, 20, 2992–3005.
- Tang, L.; Tang, B.; Kang, L.; Zhang, L. A Novel Task Caching and Migration Strategy in Multi-Access Edge Computing Based on the Genetic Algorithm. Futur. Internet 2019, 11, 181.
- Dinh, T.Q.; Member, S.; La, Q.D.; Quek, T.Q.S. Distributed Learning for Computation Offloading in Mobile Edge Computing. IEEE Trans. Commun. 2018, 66, 6353–6367.
- Miao, Y.; Wu, G.; Li, M.; Ghoneim, A.; Al-rakhami, M. Intelligent task prediction and computation offloading based on mobile-edge cloud computing. Futur. Gener. Comput. Syst. 2020, 102, 925–931.
- Li, G.; Zhou, H.; Feng, B.; Li, G.; Li, T.; Xu, Q.; Quan, W. Fuzzy Theory Based Security Service Chaining for Sustainable Mobile-Edge Computing. Mob. Inf. Syst. 2017, 2017, 8098394.
- Vimal, S.; Khari, M.; Dey, N.; González, R.; Robinson, Y.H. Enhanced resource allocation in mobile edge computing using reinforcement learning based MOACO algorithm for IIOT. Comput. Commun. 2020, 151, 355–364.
- Li, J.; Gao, H.; Lv, T.; Lu, Y. Deep reinforcement learning based computation offloading and resource allocation for MEC. In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6.
- Wang, J.; Member, S.; Zhao, L.; Member, S.; Liu, J.; Member, S. Smart Resource Allocation for Mobile Edge Computing: A Deep Reinforcement Learning Approach. IEEE Trans. Emerg. Top. Comput. 2019, 9, 1529–1541.
- Zhang, Q.; Lin, M.; Yang, L.T.; Chen, Z.; Li, P. Energy-Efficient Scheduling for Real-Time Systems Based on Deep Q-Learning Model. IEEE Trans. Sustain. Comput. 2017, 4, 132–141.
- Luo, Z.; Liwang, M.; Lin, Z.; Huang, L.; Du, X. Energy-Efficient Caching for Mobile Edge Computing in 5G Networks. Appl. Sci. 2017, 7, 557.
- Xiao, L.; Wan, X.; Dai, C.; Du, X.; Chen, X.; Guizani, M. Security in Mobile Edge Caching with Reinforcement Learning. IEEE Wirel. Commun. 2018, 25, 116–122.
- Huang, L.; Feng, X.; Zhang, C.; Qian, L.; Wu, Y. Deep reinforcement learning-based joint task of fl oading and bandwidth allocation for multi-user mobile edge computing. Digit. Commun. Netw. 2019, 5, 10–17.
- Li, Z. Genetic Algorithm-Based Optimization of Offloading and Resource Allocation in Mobile-Edge Computing. Information 2020, 11, 83.
- Huang, L.; Feng, X.; Feng, A.; Huang, Y.; Qian, L.P. Distributed Deep Learning-based Offloading for Mobile Edge Computing Distributed Deep Learning-based Offloading for Mobile Edge. Mob. Netw. Appl. 2018, 1–8.
- Guo, F.; Zhang, H.; Ji, H.; Li, X.; Leung, V.C.M. An efficient computation offloading management scheme in the densely deployed small cell networks with mobile edge computing. IEEE/ACM Trans. Netw. 2018, 26, 2651–2664.
- Liu, Q.; Shi, L.; Sun, L.; Li, J.; Ding, M.; Shu, F.S. Path Planning for UAV-Mounted Mobile Edge Computing with Deep Reinforcement Learning. IEEE Trans. Veh. Technol. 2020, 69, 5723–5728.
- Wang, L.; Wang, K.; Pan, C.; Xu, W.; Aslam, N.; Hanzo, L. Multi-Agent Deep Reinforcement Learning-Based Trajectory Planning for Multi-UAV Assisted Mobile Edge Computing. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 73–84.
- Liu, Y.; Member, S.; Chen, Y.; Member, S. Artificial Intelligence Driven UAV-NOMA-MEC in Next Generation Wireless Networks. arXiv 2021, arXiv:2101.11681. Available online: https://arxiv.org/abs/2101.11681v1 (accessed on 12 November 2021).
- Wang, H.; Ke, H.; Sun, W. Unmanned-aerial-vehicle-assisted computation offloading for mobile edge computing based on deep reinforcement learning. IEEE Access 2020, 8, 180784–180798.
- Ullah, Z.; Al-Turjman, F.; Moatasim, U.; Mostarda, L.; Gagliardi, R. UAVs joint optimization problems and machine learning to improve the 5G and Beyond communication. Comput. Netw. 2020, 182, 107478.
- Pourghasemian, M.; Abedi, M.R.; Salarhosseini, S.; Mokari, N.; Javan, M.R.; Jorswieck, E.A. AI-Based and Mobility-Aware Energy Efficient Resource Allocation and Trajectory Design for NFV Enabled Aerial Networks. arXiv 2021, arXiv:2105.10282. Available online: https://arxiv.org/abs/2105.10282v1 (accessed on 12 November 2021).
- Yu, S.; Wang, X.; Langar, R. Computation offloading for mobile edge computing: A deep learning approach. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Bologna, Italy, 9–12 September 2018; pp. 1–6.
- Zhang, B.; Zhang, G.; Ma, S.; Yang, K.; Wang, K. Efficient Multitask Scheduling for Completion Time Minimization in UAV-Assisted Mobile Edge Computing. Mob. Inf. Syst. 2020, 2020, 8791030.
- Chen, L.; Zhao, R.; He, K.; Zhao, Z.; Fan, L. Intelligent ubiquitous computing for future UAV-enabled MEC network systems. Cluster Comput. 2021.
- Liu, Y.; Xie, S.; Zhang, Y. Cooperative Offloading and Resource Management for UAV-Enabled Mobile Edge Computing in Power IoT System. IEEE Trans. Veh. Technol. 2020, 69, 12229–12239.
- Liu, X.; Liu, Y.; Chen, Y.; Hanzo, L. Trajectory design and power control for multi-UAV assisted wireless networks: A machine learning approach. IEEE Trans. Veh. Technol. 2019, 68, 7957–7969.
- Ma, X.; Yin, C.; Liu, X. Machine Learning Based Joint Offloading and Trajectory Design in UAV Based MEC System for IoT Devices. In Proceedings of the 2020 IEEE 6th International Conference on Computer and Communications (ICCC), Chengdu, China, 11–14 December 2020; pp. 902–909.
- Grasso, C.; Raftopoulos, R.; Schembra, G. Deep Q-Learning for Job Offloading Orchestration in a Fleet of MEC UAVs in 5G Environments. In Proceedings of the 2021 IEEE 7th International Conference on Network Softwarization (NetSoft), Tokyo, Japan, 28 June–2 July 2021; pp. 186–190.
More