Voxel-based data structures, algorithms, frameworks, and interfaces have been used in computer graphics and many other applications for decades. There is a general necessity to seek adequate digital representations, such as voxels, that would secure unified data structures, multi-resolution options, robust validation procedures and flexible algorithms for different 3D tasks.
- voxel
- voxelisation
- algorithms
- geometric primitives
1. Introduction
2. Voxelisation Properties
The literature provides many definitions of a voxel space. Here we will refer to a voxels space as to an integer space. A grid point represents a cell commonly referred to as a voxel. Voxels can have multiple properties, which can be organised differently with respect to the application. Binary voxelisation is a term to indicate that a voxel can have a property, which can take only two values: 0 (empty) or 1 (filled).2.1. Common Voxelisation Properties
The shape of a voxel is generally considered as a cube, although applications may use cuboid representations [13]. The neighbourhood properties of a voxel play an important role in all voxel-based algorithms. A voxel can have a maximum of 26 adjacent voxels, from which 6 share a face, 12 share an edge and 8 voxels share only a corner in 3D space (Figure 1). Based on this, the adjacency relation N between two voxels is defined. Face-sharing voxels have adjacency 6, face-sharing and edge-sharing voxels have the adjacency of 18, and 26-adjacent voxels are those that share a face, edge or corner.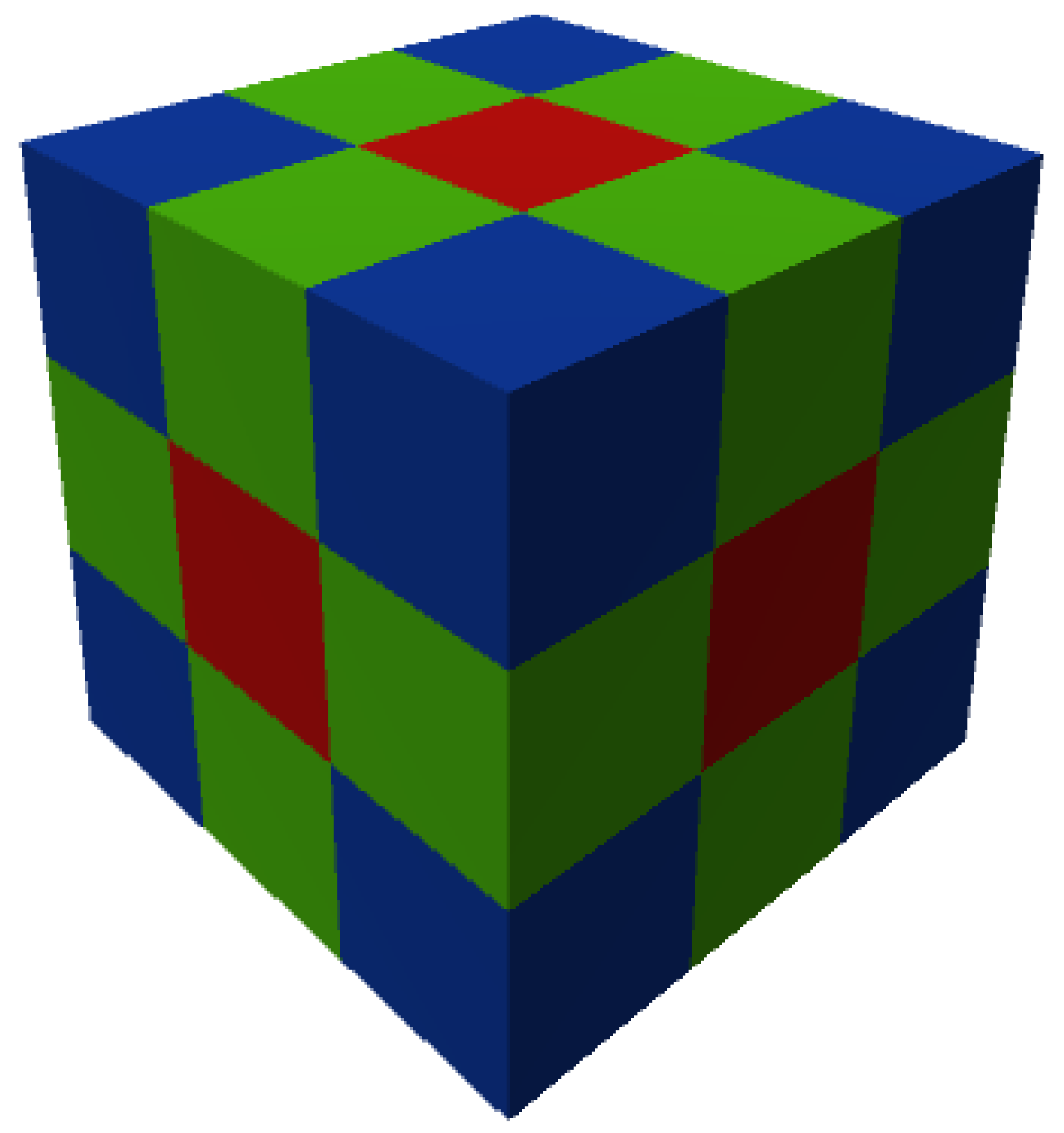
2.2. Binary and Non-Binary Voxelisation
3. Voxelisation of Geometric Primitives
3.1. Point Voxelisation
3.2. Line Voxelisation
3.2.1. 6-Connected Voxelisation Algorithms
A method generating a 6-connected line, named tripod, is proposed suggesting a comparable performance in voxelisation speed with the RLV algorithm [23]. The method is tracking the projections of a line on the three main axes. However, it requires the line of origin to lay at the centre of the voxel to avoid fractions in calculations, which might not achieve the containment of the original line (Figure 4c).
Following the same structure as RLV, a new approach is presented called integer-only line voxelisation (ILV) [41]. The main idea of this method is to avoid floating-point arithmetic and divisions present in RLV. Apart from the shift of the starting point of a line as in the tripod algorithm, this algorithm shifts the endpoint to the voxel centre as well (Figure 4d).
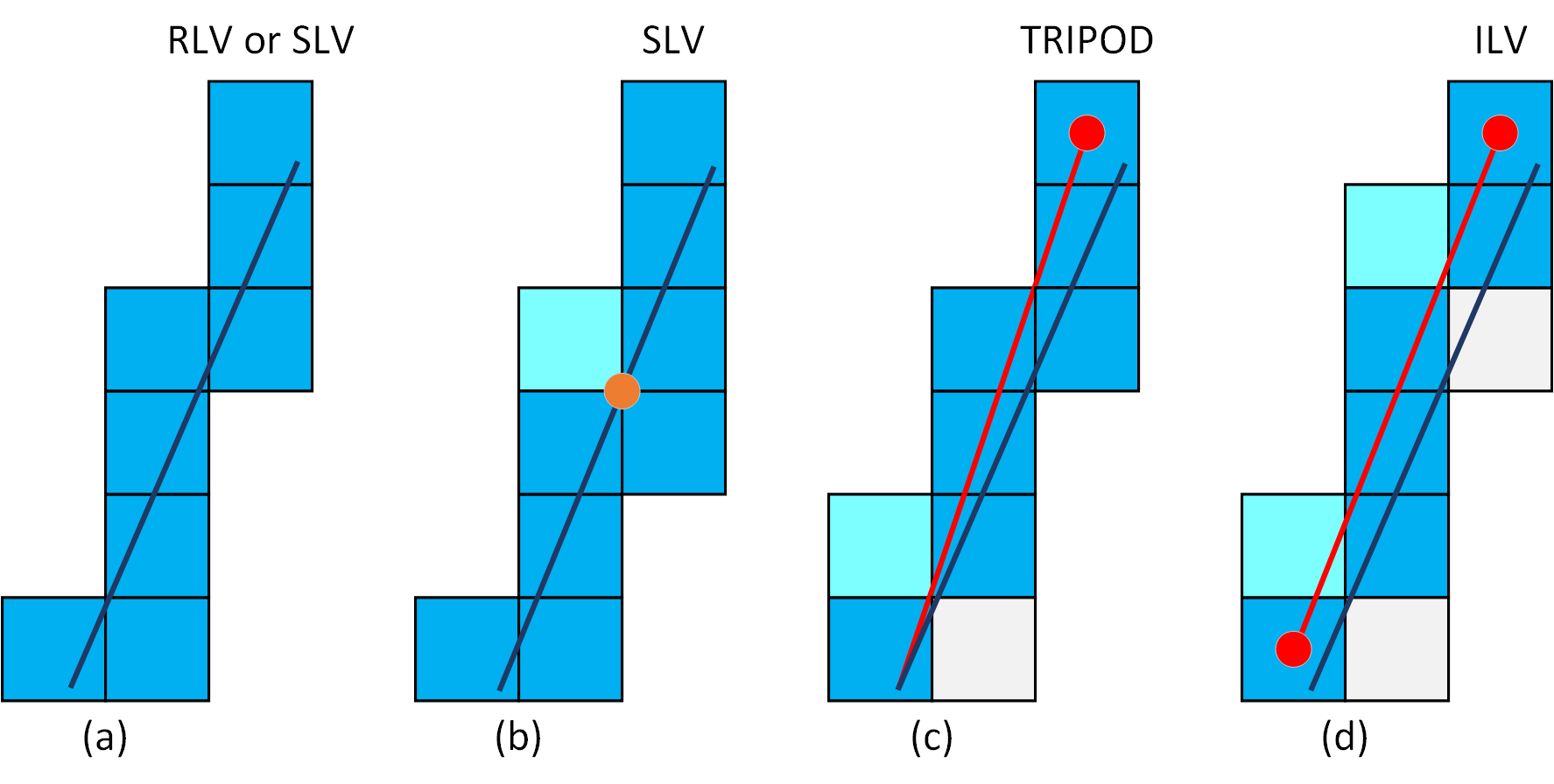
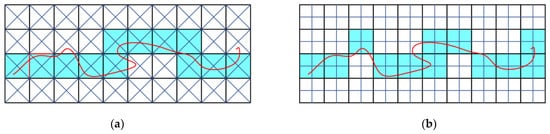
Figure 4. (a) RLV or SLV; (b) SLV generates more voxels than RLV considering all touching voxels; (c,d) small variations of the voxels coverage generated by Tripod and ILV algorithm.
3.2.2. 26-Connected Voxelisation Algorithms
3.2.3. Spline Voxelisation Algorithms
3.2.4. Comparison of Line Voxelisation Algorithms
| Method | Type | Property | General Purpose | ||
|---|---|---|---|---|---|
| 2D Bresenham’s line algorithm [49] | Integer-only | 8-connected | Line primitives rasterisation | ||
| 2D-DDA | Floating-point or integer | 8-connected | Line primitives rasterisation | ||
| 3D-DDA [50] | |||||
| [ | Floating-point or integer | 226-connected | Line primitives voxelisation | ||
| ] | Slice-based | RLV & SLV [1] | Floating-point | Conservative | Line primitives voxelisation |
| Xiaolin Wu’s line algorithm [48] |
3.3.2. Raycasting
3.3.3. Comparison of Triangle Voxelisation Algorithms
| Rendering | |||||||||||
| [14] | Slice-based | ‘26-connected’ | Depth peeling | Rendering | |||||||
| [70] | Slice-based | Conservative | Bounding box | Collision detection | |||||||
| Interior only | Bitwise OR operation | Rendering | [63] | Rasterisation | 26-connected | ||||||
| [ | Bounding box | 28 | Rendering | ] | Slice-based | Interior only | Mask creation | Voxelisation | Floating-point | Conservative | Antialiasing |
| [31] | Tripod [23] | Integer | 6-connected | Line primitives voxelisation | |||||||
| 3D Bresenham’s line algorithm [51] | Integer-only | 26-connected | Line primitives voxelisation | ||||||||
| Targets-based approaches [52] | Floating-point | 6/26-connected | Irregular line primitives voxelisation | ||||||||
| ILV [33] | Integer-only | 6-connected | Surface voxelisation |
3.3. Triangle Voxelisation
3.3.1. Rasterisation
| [ | |||||||||
| 71 | |||||||||
| ] | |||||||||
| Rasterisation | 26-connected | Bounding box | Rendering | ||||||
| Slice-based | Interior only & conservative | Single pass & bitwise OR operation | Voxelisation | [73] | Rasterisation | 26-connected | Tile-based | Voxelisation | |
| [3] | Rasterisation | Interior only | Tile-based, bounding box, sparse octree | Voxelisation & storage | [3] | Rasterisation | Conservative & 26-connected | Bounding box | Voxelisation |
| [75] | Rasterisation | ‘Conservative’ | Two level grids | Rendering | |||||
| [26] | Rasterisation | Conservative & 26-connected | Tile-based & bucketing | Voxelisation & rendering | |||||
| [32] | Rasterisation | 26-connected | Point tessellation | Voxelisation | |||||
| [46] | Raycasting | 6/26-connected | Intersecting targets | Voxelisation | |||||
| [33] | Rasterisation | 6/26-connected | ILV | Voxelisation | |||||
| [37] | Rasterisation & raycasting | Conservative | Tile-based + ray-triangle intersection | Voxelisation & rendering |
| Method | Type | Property | Main Technique |
|---|---|---|---|
| [3][54][56][57][58][62] | Rasterisation | 6/26-connected & conservative | Bounding box, backtrack, zigzag, central-line, and midpoint traversal |
| [3][26][59][60][61] | Rasterisation | 6/26-connected & conservative | Tile-based |
| [46][64][65][66][68] | Raycasting | 6/26-connected | Ray-triangle and ray-polygon intersection |
| [33][53] | Rasterisation | 6/26-connected & conservative | Line rasterisation |
3.4. Surface Voxelisation
3.4.1. Slice-Based
3.4.2. Rasterisation
3.4.3. Comparison of Surface Voxelisation Algorithms
| Method | Type | Property | Main Technique | General Purpose |
|---|---|---|---|---|
| [35] | Slice-based | ‘26-connected’ | Plane slicing |
3.5. Solid Voxelisation
3.5.1. Slice-Based
3.5.2. Rasterisation
3.5.3. Comparison of Solid Voxelisation Algorithms
| Method | Type | Property | Main Technique | General Purpose |
|---|---|---|---|---|
| [35] | Slice-based | Interior only | Plane slicing | Voxelisation |
| [76] | Slice-based | Interior only | Surface voxelisation + 2D scan-filling | Voxelisation |
4. Conclusions
We see that voxelisation is used in many areas, and it can be quite diverse in many aspects. In Section 2, we covered the main concepts considered in voxelisation such as connectivity, separability, coverage, as well as tunnel-freeness. We can say that 26-connected voxelisation usually requires less time and memory to be created and stored compared to 6-connected and conservative voxelisation. A 6-separated voxelisation is usually sufficient for applications such as fluid simulations. For collision detection, occlusion culling and visibility processing conservative voxelisation is highly desirable. Tunnelling can be addressed if 6-connected voxelised lines are used to send rays or to intersect with objects. The other option would be to consider either 6-connected or conservative voxelisation for all objects. The usage of binary and non-binary voxelisation is presented as well, indicating that non-binary voxelisation might be even more applicable than binary one.
Regarding 3D primitives, we examined voxelisation of points, lines, triangles, surfaces, and solids. In terms of line voxelisation, we split the algorithms into three groups, where the first two deal with different types of connectivity, while the third group focuses on voxelisation of curves. For triangles, we examined how rasterisation and raycasting techniques can be used. In terms of surfaces and solids, we identified that slice-based and rasterisation techniques are mainly used to perform voxelisation. We can see that surface voxelisation is investigated by the greatest number of researchers. There are several reasons for this. Firstly, surface voxelisation achieves smaller memory output and is faster compared to solid voxelisation. Secondly, some of the very common requirements such as collision detection, fluid simulations and ray tracing can be easily achieved based on them. We should point out that all algorithms for solid voxelisation concentrate on the voxelisation of watertight models, which is not necessarily sufficient for some application domains like building information modelling (BIM) where objects may have overlaps.
We presented here a vast number of algorithms targeting voxelisation of different geometric primitives. The greatest challenge is the availability of these algorithms for testing and further research, which usually requires building them from scratch in a possibly nonoptimal way. Therefore, creating a library with these algorithms would definitely facilitate the development of new approaches for voxelisations. Another interesting idea is to develop a database that would use some of the presented data structures to effectively store and process voxels.
References
- Amanatides, J.; Woo, A. A Fast Voxel Traversal Algorithm for Ray Tracing; Eurographic: Goslar, Germany, 1987; Volume 87, pp. 3–10.
- Eisemann, E.; Décoret, X. Fast scene voxelization and applications. In Proceedings of the 2006 Symposium on Interactive 3D Graphics and Games, Redwood City, CA, USA, 14–17 March 2006; pp. 71–78.
- Schwarz, M.; Seidel, H.-P. Fast parallel surface and solid voxelization on GPUs. ACM Trans. Graph. 2010, 29, 1–10.
- Gorte, B.G.H.; Zhou, K.; van der Sande, C.J.; Valk, C. A computationally cheap trick to determine shadow in a voxel model. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 4, 67–71.
- Reinbothe, C.K.; Boubekeur, T.; Alexa, M. Hybrid Ambient Occlusion; Eurographics: Goslar, Germany, 2009; pp. 51–57.
- Nichols, G.; Penmatsa, R.; Wyman, C. Interactive, multiresolution image-space rendering for dynamic area lighting. In Computer Graphics Forum; Blackwell Publishing Ltd.: Oxford, UK, 2010; Volume 29, pp. 1279–1288.
- Aleksandrov, M.; Zlatanova, S.; Kimmel, L.; Barton, J.; Gorte, B. Voxel-based visibility analysis for safety assessment of urban environments. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Singapore, 24–27 September 2019; Volume 4.
- Petoussi-Henss, N.; Zankl, M.; Fill, U.; Regulla, D. The GSF family of voxel phantoms. Phys. Med. Biol. 2001, 47, 89–106.
- Caon, M. Voxel-based computational models of real human anatomy: A review. Radiat. Environ. Biophys. 2004, 42, 229–235.
- Nießner, M.; Zollhöfer, M.; Izadi, S.; Stamminger, M. Real-time 3D reconstruction at scale using voxel hashing. ACM Trans. Graph. 2013, 32, 1–11.
- Beckhaus, S.; Wind, J.; Strothotte, T. Hardware-based voxelization for 3D spatial analysis. In Proceedings of the 5th International Conference on Computer Graphics and Imaging, Athens, Greece, 8–10 July 2002; Volume 20.
- Jørgensen, F.; Møller, R.R.; Nebel, L.; Jensen, N.-P.; Christiansen, A.V.; Sandersen, P.B.E. A method for cognitive 3D geological voxel modelling of AEM data. Bull. Eng. Geol. Environ. 2013, 72, 421–432.
- Stafleu, J.; Dubelaar, C.W. Product specification subsurface model GeoTOP. TNO Rep. 2016, R10133.
- Li, W.; Fan, Z.; Wei, X.; Kaufman, A. GPU-based flow simulation with complex boundaries. GPU Gems 2003, 2, 747–764.
- Huang, M.; Wei, P.; Liu, X. An efficient encoding voxel-based segmentation (EVBS) algorithm based on fast adjacent voxel search for point cloud plane segmentation. Remote Sens. 2019, 11, 2727.
- Poux, F.; Billen, R. Voxel-based 3D point cloud semantic segmentation: Unsupervised geometric and relationship featuring vs deep learning methods. ISPRS Int. J. Geo-Inf. 2019, 8, 213.
- Vo, A.-V.; Truong-Hong, L.; Laefer, D.F.; Bertolotto, M. Octree-based region growing for point cloud segmentation. ISPRS J. Photogramm. Remote Sens. 2015, 104, 88–100.
- Kyaw, A.S. Unity 4. X Game AI Programming; Packt Publishing Ltd.: Birmingham, UK, 2013.
- Gorte, B.; Aleksandrov, M.; Zlatanova, S. Towards egress modelling in voxel building models. ISPRS annals of the photogrammetry, remote sensing and spatial information sciences. In Proceedings of the 4th International Conference on Smart Data and Smart Cities, Kuala Lumpur, Malaysia, 1–3 October 2019; Volume 4.
- Gorte, B.; Zlatanova, S.; Fadli, F. Navigation in indoor voxel models. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 4, 279–283.
- Boyles, M.; Fang, S. Slicing-based volumetric collision detection. J. Graph. Tools 1999, 4, 23–32.
- Silver, D.; Gagvani, N. Shape-based volumetric collision detection. In Proceedings of the 2000 IEEE Symposium on Volume Visualization (VV 2000), Salt Lake City, UT, USA, 9–10 October 2000; pp. 57–61.
- Cohen-Or, D.; Kaufman, A. 3D line voxelization and connectivity control. IEEE Comput. Graph. Appl. 1997, 17, 80–87.
- Dachille, F., IX; Kaufman, A. Incremental triangle voxelization. In Proceedings of the Graphics Interface, Montreal, QC, Canada, 15–17 May 2000; pp. 205–212.
- Kaufman, A.; Shimony, E. 3D scan-conversion algorithms for voxel-based graphics. In Proceedings of the 1986 workshop on Interactive 3D graphics, New York, NY, USA, 1 January 1987; pp. 45–75.
- Pantaleoni, J. VoxelPipe: A programmable pipeline for 3D voxelization. In Proceedings of the ACM SIGGRAPH Symposium on High Performance Graphics, Vancouver, BC, Canada, 5–7 August 2011; pp. 99–106.
- Cohen-Or, D.; Kaufman, A. Fundamentals of surface voxelization. Graph. Model. Image Process. 1995, 57, 453–461.
- Liao, D. GPU-accelerated multi-valued solid voxelization by slice functions in real time. In Proceedings of the 24th Spring Conference on Computer Graphics, Budmerice, Slovakia, 21–23 April 2008; pp. 113–120.
- Wang, S.W.; Kaufman, A.E. Volume sampled voxelization of geometric primitives. In Proceedings Visualization’93, San Jose, CA, USA, 25–29 October 1993; IEEE: New York, NY, USA, 1999; pp. 78–84.
- Crassin, C.; Green, S. Octree-based sparse voxelization using the GPU hardware rasterizer. OpenGL Insights 2012, 303–318. Available online: https://research.nvidia.com/publication/octree-based-sparse-voxelization-using-gpu-hardware-rasterizer (accessed on 30 November 2021).
- Eisemann, E.; Décoret, X. Single-pass gpu solid voxelization and applications. In Proceedings of the GI’08: Proceedings of the Graphics Interface, Windsor, ON, Canada, 28–30 May 2008.
- Fei, Y.; Wang, B.; Chen, J. Point-tessellated voxelization. In Proceedings of the Graphics Interface 2012, Toronto, ON, Canada, 28–30 May 2012; pp. 9–18.
- Zhang, Y.; Garcia, S.; Xu, W.; Shao, T.; Yang, Y. Efficient voxelization using projected optimal scanline. Graph. Models 2018, 100, 61–70.
- Sramek, M.; Kaufman, A.E. Alias-free voxelization of geometric objects. IEEE Trans. Vis. Comput. Graph. 1999, 5, 251–267.
- Fang, S.; Chen, H. Hardware accelerated voxelization. Comput. Graph. 2000, 24, 433–442.
- Heidelberger, B.; Teschner, M.; Gross, M.H. Volumetric collision detection for derformable objects. CS Tech. Rep. 2003, 395, 9.
- Young, G.; Krishnamurthy, A. GPU-accelerated generation and rendering of multi-level voxel representations of solid models. Comput. Graph. 2018, 75, 11–24.
- Zhang, Z.; Morishima, S.; Wang, C. Thickness-aware voxelization. Comput. Animat. Virtual Worlds 2018, 29, e1832.
- Sigg, C.; Peikert, R.; Gross, M. Signed distance transform using graphics hardware. In Proceedings of the IEEE Visualization, Seattle, WA, USA, 22–24 October 2003; IEEE: Manhattan, NY, USA, 2003; pp. 83–90.
- Varadhan, G.; Krishnan, S.; Kim, Y.J.; Diggavi, S.; Manocha, D. Efficient max-norm distance computation and reliable voxelization. In Symposium on Geometry Processing; ACM Digital Library: New York, NY, USA, 2003; pp. 116–126.
- Jones, M.W.; Baerentzen, J.A.; Sramek, M. 3D distance fields: A survey of techniques and applications. IEEE Trans. Vis. Comput. Graph. 2006, 12, 581–599.
- Novotny, P.; Dimitrov, L.I.; Sramek, M. Enhanced voxelization and representation of objects with sharp details in truncated distance fields. IEEE Trans. Vis. Comput. Graph. 2009, 16, 484–498.
- Stolte, N. Robust Voxelization of Surfaces; Center for Visual Computing and Computer Science Department, State University of New York at Stony Brook: Stony Brook, NY, USA, 1997; Available online: http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.22.1047&rep=rep1&type=pdf (accessed on 30 November 2021).
- Liao, D.; Fang, S. Fast CSG voxelization by frame buffer pixel mapping. In Proceedings of the 2000 IEEE Symposium on Volume Visualization (VV 2000), Salt Lake City, UT, USA, 9–10 October 2000; IEEE: Manhattan, NY, USA, 2000; pp. 43–48.
- Gorte, B.; Zlatanova, S. Rasterization and Voxelization of Two- and Three-dimensional Space Partitionings. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 283–288.
- Nourian, P.; Gonçalves, R.; Zlatanova, S.; Ohori, K.A.; Vo, A.V. Voxelization Algorithms for Geospatial Applications: Computational Methods for Voxelating Spatial Datasets of 3D City Models Containing 3D Surface, Curve and Point Data Models. MethodsX 2016, 3, 69–86.
- Birdsall, C.K. Particle-in-cell charged-particle simulations, plus Monte Carlo collisions with neutral atoms, PIC-MCC. IEEE Trans. Plasma Sci. 1991, 19, 65–85.
- Wu, X. An efficient antialiasing technique. ACM Siggraph Comput. Graph. 1991, 25, 143–152.
- Bresenham, J.E. Algorithm for computer control of a digital plotter. IBM Syst. J. 1965, 4, 25–30.
- Fujimoto, A.; Tanaka, T.; Iwata, K. Arts: Accelerated ray-tracing system. IEEE Comput. Graph. Appl. 1986, 6, 16–26.
- Liu, X.W.; Cheng, K. Three-dimensional extension of Bresenham’s algorithm and its application in straight-line interpolation. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2002, 216, 459–463.
- Laine, S. A topological approach to voxelization. Comput. Graph. Forum 2013, 32, 77–86.
- Håkansson, T. A Comparison of Optimal Scanline Voxelization Algorithms. Master’s Thesis, Computer Science and Software Engineering, Linköping University, Linköping, Sweden, 2020.
- Pineda, J. A parallel algorithm for polygon rasterization. In Proceedings of the 15th Annual Conference on Computer Graphics and Interactive Techniques, New York, NY, USA, 1–5 August 1988; pp. 17–20.
- Akenine-Möller, T.; Aila, T. Conservative and tiled rasterization using a modified triangle set-up. J. Graph. Tools 2005, 10, 1–8.
- Woo, R.; Choi, S.; Sohn, J.-H.; Song, S.-J.; Bae, Y.-D.; Yoo, H.-J. A low-power 3D rendering engine with two texture units and 29-Mb embedded DRAM for 3G multimedia terminals. IEEE J. Solid-State Circuits 2004, 39, 1101–1109.
- Akenine-Möller, T.; Ström, J. Graphics for the masses: A hardware rasterization architecture for mobile phones. In ACM SIGGRAPH 2003 Papers; Association for Computing Machinery: New York, NY, USA, 2003; pp. 801–808.
- Ma, Y.; Wang, X.; Zhu, M.; Wan, W. Rasterization of geometric primitive in graphics based on FPGA. In Proceedings of the 2010 International Conference on Audio, Language and Image Processing, Shanghai, China, 23–25 November 2010; IEEE: Manhattan, NY, USA, 2010; pp. 1211–1216.
- McCormack, J.; McNamara, R. Tiled polygon traversal using half-plane edge functions. In Proceedings of the ACM SIGGRAPH/EUROGRAPHICS Workshop on Graphics Hardware, Interlaken, Switzerland, 21–22 August 2000; Association for Computing Machinery: New York, NY, USA, 2000; pp. 15–21.
- Abrash, M. Rasterization on Larrabee. Dr. Dobbs J. 1 May 2009. Available online: http://www.cs.cmu.edu/afs/cs.cmu.edu/academic/class/15869-f11/www/readings/abrash09_lrbrast.pdf (accessed on 30 November 2021).
- Sun, C.-H.; Tsao, Y.-M.; Lok, K.-H.; Chien, S.-Y. Universal Rasterizer with edge equations and tile-scan triangle traversal algorithm for graphics processing units. In Proceedings of the 2009 IEEE International Conference on Multimedia and Expo, New York, NY, USA, 28 June–3 July 2009; IEEE: New York, NY, USA, 2009; pp. 1358–1361.
- Wang, X.; Guo, F.; Zhu, M. A more efficient triangle rasterization algorithm implemented in FPGA. In Proceedings of the 2012 International Conference on Audio, Language and Image Processing, Shanghai, China, 16–18 July 2012; pp. 1108–1113.
- Fatahalian, K.; Luong, E.; Boulos, S.; Akeley, K.; Mark, W.R.; Hanrahan, P. Data-parallel rasterization of micropolygons with defocus and motion blur. In Proceedings of the Conference on High Performance Graphics 2009, New York, NY, USA, 1–3 August 2009; pp. 59–68.
- Möller, T.; Trumbore, B. Fast, minimum storage ray-triangle intersection. J. Graph. Tools 1997, 2, 21–28.
- Shevtsov, M.; Soupikov, A.; Kapustin, A.; Novorod, N. Ray-triangle intersection algorithm for modern CPU architectures. In Proceedings of the GraphiCon, Moscow, Russia, 30 October 2007; Volume 2007, pp. 33–39.
- Assarsson, U.; Moller, T. Optimized view frustum culling algorithms for bounding boxes. J. Graph. Tools 2000, 5, 9–22.
- Badouel, D. An efficient ray-polygon intersection. In Graphics Gems; Academic Press Professional: San Diego, CA, USA, 1990; pp. 390–393.
- Haines, E. Point in Polygon Strategies. Graph. Gems 1994, 4, 24–46.
- Rauwendaal, R. Hybrid Computational Voxelization Using the Graphics Pipeline. Master’s Thesis, Oregon State University, Corvallis, OR, USA, 2012.
- Zhang, L.; Chen, W.; Ebert, D.S.; Peng, Q. Conservative voxelization. Vis. Comput. 2007, 23, 783–792.
- Liu, F.; Huang, M.-C.; Liu, X.-H.; Wu, E.-H. Freepipe: A programmable parallel rendering architecture for efficient multi-fragment effects. In Proceedings of the 2010 ACM SIGGRAPH symposium on Interactive 3D Graphics and Games, Washington, DC, USA, 19–21 February 2010; pp. 75–82.
- Seiler, L.; Carmean, D.; Sprangle, E.; Forsyth, T.; Dubey, P.; Junkins, S.; Lake, A.; Cavin, R.; Espasa, R.; Grochowski, E.; et al. Larrabee: A many-core x86 architecture for visual computing. ACM Trans. Graph. 2009, 29, 10–21.
- Eisenacher, C.; Loop, C.T. Data-parallel micropolygon rasterization. In Eurographics (Short Papers); European Association for Computer Graphics: Norrköping, Sweden, 2010; pp. 53–56.
- Faieghi, M.; Tutunea-Fatan, O.R.; Eagleson, R. Fast and cross-vendor OpenCL-based implementation for voxelization of triangular mesh models. Comput. Aided. Des. Appl. 2018, 15, 852–862.
- Kalojanov, J.; Billeter, M.; Slusallek, P. Two-level grids for ray tracing on GPUs. Comput. Graph. Forum 2011, 30, 307–314.
- Dong, Z.; Chen, W.; Bao, H.; Zhang, H.; Peng, Q. Real-time voxelization for complex polygonal models. In Proceedings of the 12th Pacific Conference on Computer Graphics and Applications, Seoul, Korea, 6–8 October 2004; IEEE: Manhattan, NY, USA, 2004; pp. 43–50.
- Reitinger, B.; Bornik, A.; Beichel, R. Efficient volume measurement using voxelization. In Proceedings of the 19th Spring Conference on Computer Graphics, New York, NY, USA, 24–26 April 2003; pp. 47–54.