State of power (SOP), as one of the key states of lithium-ion batteries, is defined as the peak power capability that a battery could deliver or receive over a prediction window while keeping the battery within the safe operating area [9]. By this definition, most existing methods for online SOP estimation employ an equivalent-circuit model (ECM) to simulate battery dynamic behaviour in a prediction window and assume batteries operating at three operation modes, namely the constant current (CC), constant voltage (CV), and constant current constant voltage (CCCV) modes. Accordingly, three online SOP estimation methods have been developed with different basic principles, and many efforts have been made in the past decades for the improved performance of online SOP estimation from three aspects: (1) model structure; (2) online parameter identification technique; and (3) SOP estimation algorithm.
- online state of power estimation
- equivalent-circuit model
- lithium-ion battery
- electrical vehicle
- review
1. Basic Principle of Online SOP Estimation
1.1. SOP Estimation at a Constant Current Mode
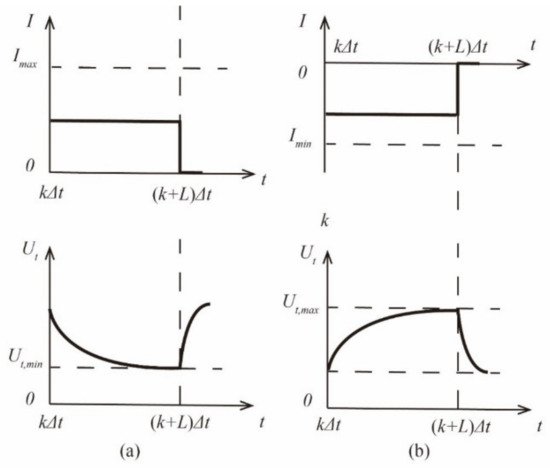
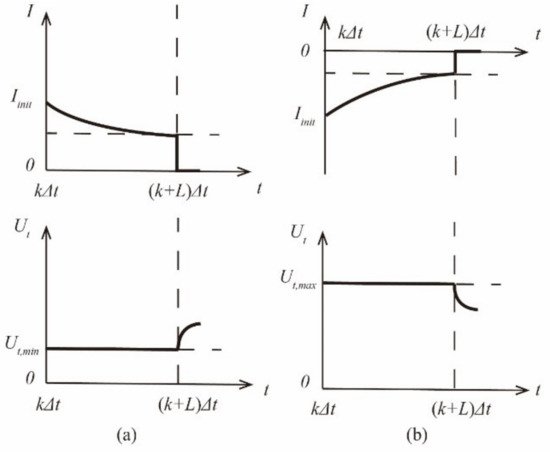
1.2. SOP Estimation at a Constant Voltage Mode
In online SOP estimation at a CV mode, a battery is forced to continuously operate at its lower (or upper) cut-off voltage throughout a prediction window [3]. As depicted in Figure 2, the peak discharge current would monotonically decrease, while the peak charge current exhibits an opposite trend in this period. Therefore, accurately capturing the current variation trend is required, based on the employed ECM during the prediction window, while the battery terminal voltage is deemed to be kept at Ut,min (or Ut,max).
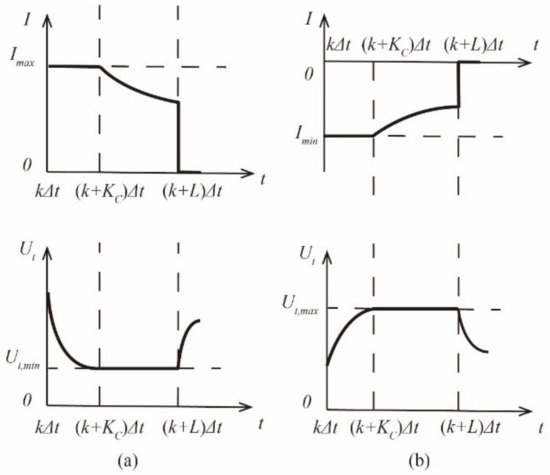
1.3. SOP Estimation at a Constant Current Constant Voltage Mode
In online SOP estimation at a CCCV mode, a battery is operating at current limit at a CC mode at the very beginning and will shift from the CC mode to a CV mode once battery terminal voltage reaches voltage limit, as depicted in Figure 3. It can be observed that pinpointing the timing the shift from CC to CV mode is the key to work out the peak power of the CCCV mode. Such critical timing occurs when a battery is operating at its pre-set current limit, while its terminal voltage reaches Ut,min (or Ut,max). Afterwards, the battery will turn to CV mode, and the load current has to reduce to avoid breaking the pre-set voltage limit [4].
2. Improvements on Equivalent Circuit Model
(ECM) -Based Method for Online SOP Estimation
2.1. Improvements on Battery Modelling
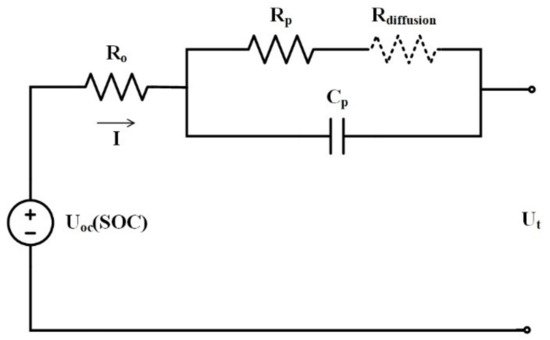
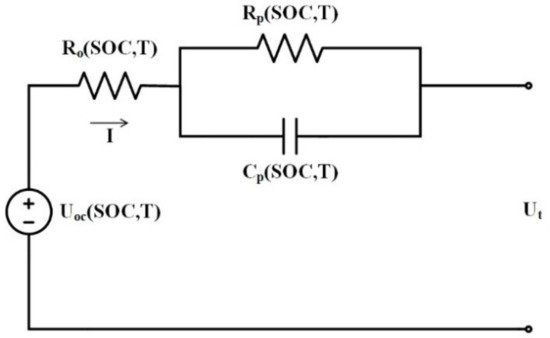
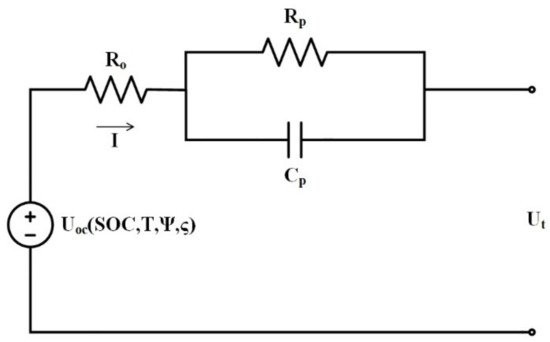
2.1.1. Improved 1-RC Model

| Improved 1-RC Models | Benefits | Drawbacks | ||||||
|---|---|---|---|---|---|---|---|---|
| Structure improvements |
1-RC model with diffusion resistance | [5] |
|
| ||||
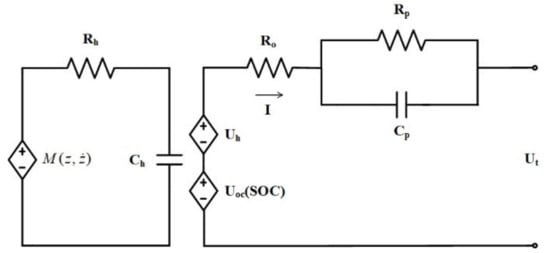
| 1-RC model with one-state hysteresis | [6][7][8][9] |
|
| |||||
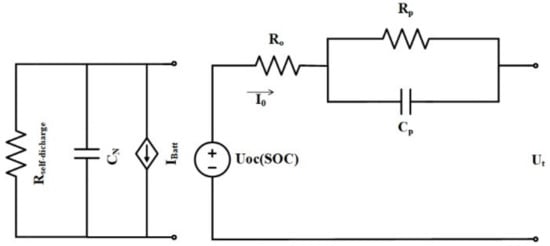
| 1-RC model considering self-discharge phenomenon | [11] |
|
| |||||
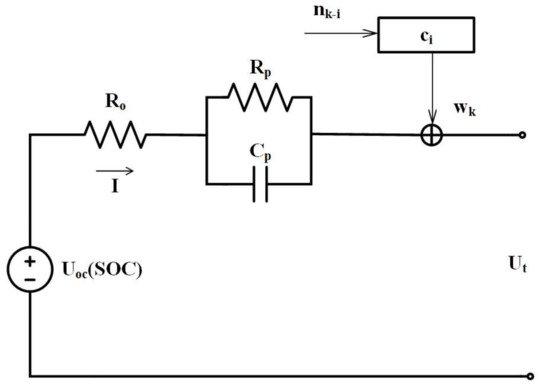
| 1-RC model with a moving average noise | [12] |
|
| |||||
| Consider parameter dependencies |
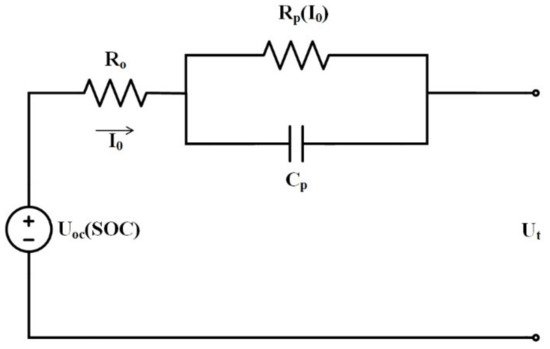
1-RC model incorporating Bulter-Volmer equation | [13][14] |
|
| ||||
| Migrated 1-RC model | [15] |
|
| |||||
| 1-RC model with multi-dependent OCV | [16] |
|
|
2.2. Improved Online Parameter Identification Technique
2.3. Improvements on SOP Estimation Algorithms
2.3.1. Long-Term SOP Estimation
2.3.2. Optimisation Control-Based SOP Estimation
2.3.3. SOP-Related Multi-State Co-Estimation
2.3.4. Machine Learning-Based SOP Estimation
2.3.5. Pack-Level SOP Estimation
References
- Sun, F.; Xiong, R.; He, H.; Li, W.; Aussems, J.E.E. Model-Based Dynamic Multi-Parameter Method for Peak Power Estimation of Lithium–Ion Batteries. Appl. Energy 2012, 96, 378–386.
- Sun, F.; Xiong, R.; He, H. Estimation of State-of-Charge and State-of-Power Capability of Lithium-Ion Battery Considering Varying Health Conditions. J. Power Sources 2014, 259, 166–176, doi:10.1016/j.jpowsour.2014.02.095.
- Wang, S.; Verbrugge, M.; Wang, J.S.; Liu, P. Multi-Parameter Battery State Estimator Based on the Adaptive and Direct Solu-tion of the Governing Differential Equations. J. Power Sources 2011, 196, 8735–8741.
- Pei, L.; Zhu, C.; Wang, T.; Lu, R.; Chan, C.C. Online Peak Power Prediction Based on a Parameter and State Estimator for Lithium-Ion Batteries in Electric Vehicles. Energy 2014, 66, 766–778, doi:10.1016/j.energy.2014.02.009.
- Wang, S.; Verbrugge, M.; Wang, J.S.; Liu, P. Power Prediction from a Battery State Estimator That Incorporates Diffusion Resistance. J. Power Sources 2012, 214, 399–406.
- Hu, X.; Xiong, R.; Egardt, B. Model-Based Dynamic Power Assessment of Lithium-Ion Batteries Considering Different Operating Conditions. IEEE Trans. Ind. Inf. 2014, 10, 1948–1959.
- Wang, Y.; Pan, R.; Liu, C.; Chen, Z.; Ling, Q. Power Capability Evaluation for Lithium Iron Phosphate Batteries Based on Multi-Parameter Constraints Estimation. J. Power Sources 2018, 374, 12–23.
- Wei, C.; Benosman, M. Extremum Seeking-Based Parameter Identification for State-of-Power Prediction of Lithium-Ion Batteries. In Proceedings of the 2016 IEEE International Conference on Renewable Energy Research and Applications (ICRERA), IEEE, Birmingham, UK, 20–23 November 2016; pp. 67–72.
- Xiang, S.; Hu, G.; Huang, R.; Guo, F.; Zhou, P. Lithium-Ion Battery Online Rapid State-of-Power Estimation under Multiple Constraints. Energies 2018, 11, 283.
- Hu, X.; Li, S.; Peng, H. A Comparative Study of Equivalent Circuit Models for Li-Ion Batteries. J. Power Sources 2012, 198, 359–367.
- Dong, G.; Wei, J.; Chen, Z. Kalman Filter for Onboard State of Charge Estimation and Peak Power Capability Analysis of Lithium-Ion Batteries. J. Power Sources 2016, 328, 615–626.
- Feng, T.; Yang, L.; Zhao, X.; Zhang, H.; Qiang, J. Online Identification of Lithium-Ion Battery Parameters Based on an Improved Equivalent-Circuit Model and Its Implementation on Battery State-of-Power Prediction. J. Power Sources 2015, 281, 192–203.
- Jiang, J.; Liu, S.; Ma, Z.; Wang, L.Y.; Wu, K. Butler-Volmer Equation-Based Model and Its Implementation on State of Power Prediction of High-Power Lithium Titanate Batteries Considering Temperature Effects. Energy 2016, 117, 58–72.
- Waag, W.; Fleischer, C.; Sauer, D.U. Adaptive On-Line Prediction of the Available Power of Lithium-Ion Batteries. J. Power Sources 2013, 242, 548–559.
- Tang, X.; Wang, Y.; Yao, K.; He, Z.; Gao, F. Model Migration Based Battery Power Capability Evaluation Considering Uncertainties of Temperature and Aging. J. Power Sources 2019, 440, 227141.
- Yang, L.; Cai, Y.; Yang, Y.; Deng, Z. Supervisory Long-Term Prediction of State of Available Power for Lithium-Ion Batteries in Electric Vehicles. Appl. Energy 2020, 257, 114006.
- Gao, W.; Zou, Y.; Sun, F.; Hu, X.; Yu, Y.; Feng, S. Data Pieces-Based Parameter Identification for Lithium-Ion Battery. J. Power Sources 2016, 328, 174–184.
- Jiang, B.; Dai, H.; Wei, X.; Zhu, L.; Sun, Z. Online Reliable Peak Charge/Discharge Power Estimation of Series-Connected Lithium-Ion Battery Packs. Energies 2017, 10, 390.
- Wang, S.; Verbrugge, M.; Wang, J.S.; Liu, P. Multi-Parameter Battery State Estimator Based on the Adaptive and Direct Solution of the Governing Differential Equations. J. Power Sources 2011, 196, 8735–8741.
- Xiong, R.; He, H.; Sun, F.; Liu, X.; Liu, Z. Model-Based State of Charge and Peak Power Capability Joint Estimation of Lithium-Ion Battery in Plug-in Hybrid Electric Vehicles. J. Power Sources 2013, 229, 159–169.
- Xiong, R.; He, H.; Sun, F.; Zhao, K. Online Estimation of Peak Power Capability of Li-Ion Batteries in Electric Vehicles by a Hardware-in-Loop Approach. Energies 2012, 5, 1455–1469.
- Xiong, R.; Sun, F.; Chen, Z.; He, H. A data-driven multi-scale extended Kalman filtering based parameter and state estimation approach of lithium-ion polymer battery in electric vehicles. Appl. Energy 2014, 113, 463–476.
- Li, B.; Wang, S.; Fernandez, C.; Yu, C.; Xia, L.; Fan, Y. A Linear Recursive State of Power Estimation Method Based on Fusion Model of Voltage and State of Charge Limitations. J. Energy Storage 2021, 40, 102583.
- Wei, Z.; Zhao, J.; Xiong, R.; Dong, G.; Pou, J.; Tseng, K.J. Online Estimation of Power Capacity With Noise Effect Attenuation for Lithium-Ion Battery. IEEE Trans. Ind. Electron. 2019, 66, 5724–5735.
- Plett, G.L. Dual and Joint EKF for Simultaneous SOC and SOH Estimation. In Proceedings of the 21st Electric Vehicle Symposium (EVS21), Monte Carlo, Monaco, 2–6 April 2005; pp. 1–12.
- Juang, L.W.; Kollmeyer, P.J.; Jahns, T.M.; Lorenz, R.D. Implementation of Online Battery State-of-Power and State-of-Function Estimation in Electric Vehicle Applications. In Proceedings of the 2012 IEEE Energy Conversion Congress and Exposition (ECCE), IEEE, Raleigh, NC, USA, 15–20 September 2012; pp. 1819–1826.
- Zhang, W.; Wang, L.; Wang, L.; Liao, C.; Zhang, Y. Joint State-of-Charge and State-of-Available-Power Estimation Based on the Online Parameter Identification of Lithium-Ion Battery Model. IEEE Trans. Ind. Electron. 2021, 1.
- Li, X.; Sun, J.; Hu, Z.; Lu, R.; Zhu, C.; Wu, G. A New Method of State of Peak Power Capability Prediction for Li-Ion Battery. In Proceedings of the 2015 IEEE Vehicle Power and Propulsion Conference (VPPC), IEEE, Montreal, QC, Canada, 19–22 October 2015; pp. 1–5.
- Pei, L.; Zhu, C.; Wang, T.; Lu, R.; Chan, C.C. Online Peak Power Prediction Based on a Parameter and State Estimator for Lithium-Ion Batteries in Electric Vehicles. Energy 2014, 66, 766–778.
- Nejad, S.; Gladwin, D.T. Online Battery State of Power Prediction Using PRBS and Extended Kalman Filter. IEEE Trans. Ind. Electron. 2020, 67, 3747–3755.
- Zhou, Z.; Kang, Y.; Shang, Y.; Cui, N.; Zhang, C.; Duan, B. Peak Power Prediction for Series-Connected LiNCM Battery Pack Based on Representative Cells. J. Clean. Prod. 2019, 230, 1061–1073.
- Waag, W.; Fleischer, C.; Sauer, D.U. On-Line Estimation of Lithium-Ion Battery Impedance Parameters Using a Novel Varied-Parameters Approach. J. Power Sources 2013, 237, 260–269.
- Zhang, X.; Wang, Y.; Wu, J.; Chen, Z. A Novel Method for Lithium-Ion Battery State of Energy and State of Power Estimation Based on Multi-Time-Scale Filter. Appl. Energy 2018, 216, 442–451.
- Chen, Z.; Lu, J.; Yang, Y.; Xiong, R. Online Estimation of State of Power for Lithium-Ion Battery Considering the Battery Aging. In Proceedings of the 2017 Chinese Automation Congress (CAC), IEEE, Jinan, China, 20–22 October 2017; pp. 3112–3116.
- Lu, J.; Chen, Z.; Yang, Y.; Ming, L.V. Online Estimation of State of Power for Lithium-Ion Batteries in Electric Vehicles Using Genetic Algorithm. IEEE Access 2018, 6, 20868–20880.
- Malysz, P.; Ye, J.; Gu, R.; Yang, H.; Emadi, A. Battery State-of-Power Peak Current Calculation and Verification Using an Asymmetric Parameter Equivalent Circuit Model. IEEE Trans. Veh. Technol. 2016, 65, 11.
- Wang, L.; Cheng, Y.; Zou, J. Battery Available Power Prediction of Hybrid Electric Vehicle Based on Improved Dynamic Matrix Control Algorithms. J. Power Sources 2014, 261, 337–347.
- Zou, C.; Klintberg, A.; Wei, Z.; Fridholm, B.; Wik, T.; Egardt, B. Power Capability Prediction for Lithium-Ion Batteries Using Economic Nonlinear Model Predictive Control. J. Power Sources 2018, 396, 580–589.
- Esfandyari, M.J.; Hairi Yazdi, M.R.; Esfahanian, V.; Masih-Tehrani, M.; Nehzati, H.; Shekoofa, O. A Hybrid Model Predictive and Fuzzy Logic Based Control Method for State of Power Estimation of Series-Connected Lithium-Ion Batteries in HEVs. J. Energy Storage 2019, 24, 100758.
- Esfandyari, M.J.; Esfahanian, V.; Hairi Yazdi, M.R.; Nehzati, H.; Shekoofa, O. A New Approach to Consider the Influence of Aging State on Lithium-Ion Battery State of Power Estimation for Hybrid Electric Vehicle. Energy 2019, 176, 505–520.
- Zhang, W.; Shi, W.; Ma, Z. Adaptive Unscented Kalman Filter Based State of Energy and Power Capability Estimation Approach for Lithium-Ion Battery. J. Power Sources 2015, 289, 50–62.
- Shen, P.; Ouyang, M.; Lu, L.; Li, J.; Feng, X. The Co-Estimation of State of Charge, State of Health, and State of Function for Lithium-Ion Batteries in Electric Vehicles. IEEE Trans. Veh. Technol. 2017, 67, 92–103.
- Zhang, T.; Guo, N.; Sun, X.; Fan, J.; Yang, N.; Song, J.; Zou, Y. A Systematic Framework for State of Charge, State of Health and State of Power Co-Estimation of Lithium-Ion Battery in Electric Vehicles. Sustainability 2021, 13, 5166.
- Shu, X.; Li, G.; Shen, J.; Lei, Z.; Chen, Z.; Liu, Y. An Adaptive Multi-State Estimation Algorithm for Lithium-Ion Batteries Incorporating Temperature Compensation. Energy 2020, 207, 118262.
- Hu, X.; Jiang, H.; Feng, F.; Liu, B. An Enhanced Multi-State Estimation Hierarchy for Advanced Lithium-Ion Battery Management. Appl. Energy 2020, 257, 114019.
- Rahimifard, S.; Ahmed, R.; Habibi, S. Interacting Multiple Model Strategy for Electric Vehicle Batteries State of Charge/Health/ Power Estimation. IEEE Access 2021, 9, 109875–109888.
- Fleischer, C.; Waag, W.; Bai, Z.; Sauer, D.U. Self-Learning State-of-Available-Power Prediction for Lithium-Ion Batteries in Electrical Vehicles. In Proceedings of the 2012 IEEE Vehicle Power and Propulsion Conference, Seoul, South Korea, 9–12 October 2012; pp. 370–375.
- Tang, X.; Yao, K.; Liu, B.; Hu, W.; Gao, F. Long-Term Battery Voltage, Power, and Surface Temperature Prediction Using a Model-Based Extreme Learning Machine. Energies 2018, 11, 86.
- Roşca, B.; Wilkins, S.; Jacob, J.; Hoedemaekers, E.; Van Den Hoek, S. Predictive Model Based Battery Constraints for Electric Motor Control within EV Powertrains. In Proceedings of the 2014 IEEE International Electric Vehicle Conference (IEVC), IEEE, Florence, Italy, 17–19 December 2014; pp. 1–8.
- Li, X.; Xu, J.; Hong, J.; Tian, J.; Tian, Y. State of Energy Estimation for a Series-Connected Lithium-Ion Battery Pack Based on an Adaptive Weighted Strategy. Energy 2021, 214, 118858.
- Zhang, C.; Sharkh, S.M. Estimation of Real-Time Peak Power Capability of a Traction Battery Pack Used in an HEV. In Proceedings of the 2010 Asia-Pacific Power and Energy Engineering Conference, IEEE, Chengdu, China, 28–31 March 2010; pp. 1–6.
- Han, W.; Altaf, F.; Zou, C.; Wik, T. State of Power Prediction for Battery Systems with Parallel-Connected Units. IEEE Trans. Transp. Electrif. 2021, 1.