Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 2 by Bruce Ren and Version 1 by Mohammed Faeik Ruzaij Al-Okby.
The leakage of hazardous gases and chemical vapors is considered one of the dangerous accidents that can occur in laboratories, workshops, warehouses, and industrial sites that use or store these substances. The early detection and alarming of hazardous gases and volatile chemicals are significant to keep the safety conditions for the people and life forms who are work in and live around these places.
- hazardous gases
- toxic gases
- gas sensor
- safety system
- volatile organic materials (VOCs)
- alarming system
- internet of things (IoT)
- wireless sensor networks (WSNs)
1. Introduction
The term hazardous gases refer to the toxic/reactive behavior, and it can be conformed to one of the following definitions: harmful to living subjects, dangerously reactive, acutely toxic, flammable, corrosive, or oxidizing gases [1,2,3][1][2][3]. The urgent need for detection and warning devices of odorless, harmful, and toxic gases and vapors in places exposed to this, prompted the use of primitive methods that may be harsh to protect the lives of the public in these places. Until the eighties of the previous century, miners used canaries kept in a special glass cage to detect the presence of toxic gases (especially carbon monoxide) when entering the mines. Since the effect of harmful gases is greater and faster on the canaries than humans, workers were alerted to any possible danger by the ‘bird sensors’. The system included an oxygen chamber to save the bird’s life after facing the toxic gases [4].
Recently, the considerable development in laboratory infrastructures and industries increases the use of robots, drones, quadcopters, and automated transportation systems used besides humans in chemical, biological, and biotechnological processes. Moreover, numerous hazardous gases and chemicals vapors in urban places, such as laboratories in universities, research centers of companies, and big factories which may have warehouses for chemical gases/compounds and can be faced with accidental leakages of hazardous gases or vapors. Thus, sensitive systems to detect and alarm any dangerous leakage that may affect the laboratory staff or the environment, in general, are required.
Many hazardous and toxic gases require special conditions for their handling since they can cause a series of health hazards such as death or permanent injury. Typical inorganic compounds/gases include ammonia, arsine, carbon monoxide, hydrogen bromide, hydrogen chloride, hydrogen cyanide, hydrogen sulfide, nitric oxide, nitrogen dioxide, ozone, phosgene, phosphine, or sulfur dioxide. Of increasing interest are organic compounds such as saturated, unsaturated, and aromatic hydrocarbons, organochlorine compounds, organic amines, organic silanes, alcohols, esters, aldehydes, and ketones. Compounds with a very high vapor pressure are summarized under the term volatile organic compounds (VOCs) and represent the greatest danger to humans due to their easy evaporation [5,6,7][5][6][7]. The National Fire Protection Association (NFPA) created a numerical system from 0–4 for classifying the gas hazard rating based on OSHA (Occupational Safety and Health Administration) hazard communication standard where 0–4 refer to minimal, slight, moderate, serious, and severe hazard respectively [8].
Suitable sensor systems have to be developed to enable an easy, reproducible, and reliable detection of possible chemical hazards in the working environment. There are several main parts for a compact mobile detecting and alarming system (see Figure 2) which such as:
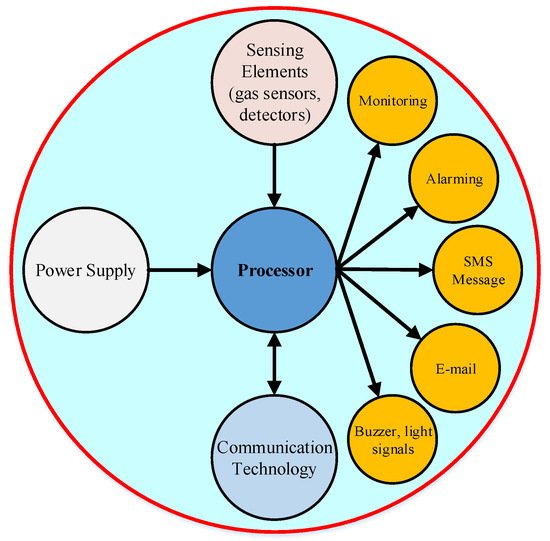
Figure 2. Basic block diagram of mobile detecting and alarming system.
1.1. Sensing Element (Gas Sensor)
The sensing elements represent the most important part that implements the target goal of detecting toxic and hazardous gases. Several technologies have been used in the manufacturing of gas sensors and based on that different sensor detecting procedures can be used. Each type of gas sensor has the characteristics that make it a better fit for specific environments and gases. In general, five main sensing principles are used for the detection:
1.1.1. Catalytic Sensors
This type of gas sensor measures the temperature difference between two beads (inert and with catalytic substance) in case of different heat responses. The catalytic bead method is mainly useful for the detection of combustible gases such as natural gas, methane, butane, propane, or hydrogen. Especially in the detection of hydrocarbons of the lower explosive level (LEL) or hydrogen (H2) this method is used to monitor explosion limits. Catalytic bead sensors are inexpensive and robust and can easily be calibrated due to the linear sensor reaction depending on the gas concentration. The disadvantages of the old bulky catalytic sensors are the low sensitivity in the percentage ranges as well as the low selectivity since this type of sensor registers every gas that burns on the catalyst surface of the pellistor and causes a measurable heat release. In addition, the sensors consume a significant amount of electrical power due to the required heating. The new MEMS-based catalytic sensors show a better selectivity with high sensitivity and very low power consumption [9,10,11][9][10][11].
1.1.2. Electrochemical Sensors
The electrochemical gas sensor (also electrochemical cells or EC sensors) uses oxidization processes to generate an electric current in electrodes. The generated current will be amplified and measured by an external circuit. The typical electrochemical gas sensor consists of three parts. The first is the gas chamber, which is located on the upper layer of the sensor to let the gases pass through the sensor. The second part is the electrochemical cell, which is located at the middle layer of the sensor. The electrochemical reaction takes place inside the electrochemical cell, which includes the electrodes (“working” electrode, a “counter” electrode, and a “reference” electrode) embedded in an electrolyte solution. The third part is the electrolyte reservoir, which is located in the lower layer of the sensor and is responsible for the change in the electrolyte concentration equilibrium. The working principle of the electrochemical sensor is based on gas diffusion. When the gas passes through the gas chamber and reaches the working electrode, an electrochemical reaction will occur depending on the gas type. The reaction causes the movement of electrons from the working electrode to the counter electrode, which can be measured by an external circuit. The value of the generated current depends on the concentration of the target gases. The electrochemical sensors have attractive specifications such as high sensitivity, high selectivity, low-power consumption, and low-cost production. The main drawback is the high sensitivity to relative humidity, temperature, and high gas concentrations, which can cause electrode poisoning. Chemical sensors also show a high-temperature dependence, resulting in offsets or influencing the sensor response times [12,13,14,15,16,17][12][13][14][15][16][17].
1.1.3. Photoionization Sensors
This sensor type uses the light ionization characteristic of gases to generate electric currents from positive and negative ions. This principle is primarily used for the detection of harmful VOCs in the environmental air. Modern PID solutions are already capable to measure concentrations of organic compounds around 1–10 ppb and have typical response times of a few seconds [10,11,12,13][10][11][12][13].
1.1.4. Infrared Sensors/Optical Sensors
The working principle of this type is based on the comparison between the actively absorbed wavelength and the reference stored wavelength (not absorbed by gases). The NDIR method is very robust and cost-effective for measuring gases with a medium resolution. Typical response times are in the region of about 20 s. Infrared and optical sensors allow small constructions which enable portable solutions. Additional reference detectors can be used to recognize many disturbances and to avoid false detections. The method can only be used for gases that absorb infrared light at known wavelengths [10,18,19,20][10][18][19][20].
1.1.5. MOX Sensors/Chemical Sensors
Metal oxide semiconductor sensors use a resistive principle, there the gas or gas mixture to be measured directly influences the conductivity of a gas-sensitive sensor layer. This change in resistance serves as a measured variable. Besides metal oxide-based sensors also organic phthalocyanines or conductive polymers, metal alloys, and transition metal dichalcogenides can be used as a sensing layer. MOX sensors show high sensitivity and can thus be used for the determination of small concentrations. They show a non-linear response to the gases. In addition, they only have low selectivity. Thus, their use is limited to the determination of known compounds [18,21,22][18][21][22].
1.2. Processor
The processor represents the brain of the system; it can be a microcontroller, PLC, or computer. It is responsible for the analysis and processing of the measured data, decision-making, and sending of the proper action signals to the output ports (e.g., alarming signals such as message, email, buzzer, light, and so on).
1.3. Wireless Communication Technology
To enable mobile systems, suitable communications technologies have to be integrated for the transfer of the measurement data. At least one communication bus is required for the transfer of the acquired data to the server, monitoring, or processing devices. Typical wireless communication principles which can be found in gas sensors are blue-tooth, Wi-Fi, ZigBee, GSM.
1.4. Power Supply
Due to the requirement of mobility, batteries are usually selected as the power supply for the selected systems in the presented work. Besides the direct use of a battery also indirect use is possible when the system is powered from the host robot, PC, or other additional devices.
1.5. Monitoring and Alarm
Monitoring and alarm are the final stages after detecting abnormal situations. As the presented work investigates detecting and alarming system, all the included systems should have this part to be eligible for inclusion. The monitoring and alarming can be implemented in several methods such as on-screen show alarm, SMS message, Email, light signals, buzzer, hybrid, and so on.
2. Mobile Detecting and Alarming System
Hazardous gases and compounds are widely used in many industrial applications. The protection of employees from harmful gases and vapors requires constant control and monitoring of the concentration of critical substances. Monitoring personal exposure is becoming more and more important here. In addition, indoor air monitoring also plays an important role in increasingly automated environments. To achieve the greatest possible flexibility here, suitable monitoring systems must be mobile and flexible in use, in contrast to the previously dominant permanently installed monitoring devices e.g., hydrogen or carbon monoxide gas emissions. Many researchers worldwide develop detecting and alarming system for hazardous and toxic gases to provide a fast response to accidents and to increase the safety conditions of the employees. Several sophisticated types of gas sensors and detectors have been combined with different communication technologies and processing devices to create a compact solution. The presented review paper does not pursue the aim of a complete evaluation of all available and reported systems. We will include most of the prominent systems that have the main conditions for inclusion, as it is declared in the previous section. We have focused on compact mobile systems that provide a wireless, Internet of things (IoT) based monitoring and alarming for targeted gases data which is more integrated into Industry 4.0. Table 1 summarizes the main parameters of the communication technologies used in the targeted systems [7].
Table 1. Wireless communication technologies are used in hazardous gases mobile detection and alarming systems.
| Wireless Technology | Protocol | Coverage Range | Frequency | Data Rate | Power Consumption | Net. Topology |
|---|---|---|---|---|---|---|
| Wi-Fi | IEEE 802.11 | ∼30–250 m | 2.4, 3.7, 5 GHz | >45 Mb/s | High | P2P, Star, Tree |
| Bluetooth, BLE | IEEE 802.15.1 | ∼100 m | 2.4 GHz | 1–3, 1 Mb/s, | Low, Very Low | P2P, Star |
| LoRa | LPWAN | ∼10 Km | 868,915 MHz | 50 Kb/s | Very Low | Star, Mesh |
| ZigBee/XBee | IEEE 802.15.4 | ∼10–100 m | 868,915 (MHz), 2.4 (GHz) | 250 Kb/s | Medium | P2P, Star, Tree, Mesh |
| GSM 2G, 4G | GSM | GSM network coverage (>10 km) | 933–960 MHz | 270 Kb/s, 3.6 Mbit/s |
High | TDMA/FDMA |
2.1. The Used Communication Technologies
Wi-Fi communication technology has been widely used in 46% of the selected papers. Velladurai et al. [23], developed a human safety system for hazardous gases detection and alerting. The system consists of a PIC16F887 microcontroller (Microchip Technology Inc., Arizona, United States) combined with several gas sensors such as MQ-4, MQ-136, and MQ-7 (Winsen Electronics Technology, Zhengzhou, China) to sense the concentration level of H2S, CO, and CH4 gases. Both sensors are metal oxide semiconductors; the change in the conductivity of the semiconductor material depending on the gas type is used for the gas quantification. The concentration of the toxic gases has been continuously monitored by a mobile application using a Wi-Fi module. The measured gas concentration data are displayed on an LCD screen. When the gas depending threshold is exceeded, an alarm will be triggered and the system will generate and send a warning SMS message to an authorized person. Details on the type of the used power supply and power consumption data are missing.
Sanger et al. [24], designed a sensor-based system for detecting methane (CH4), hydrogen sulfide (H2S), and ammonia (NH3). The system uses a basic Arduino Uno microcontroller for recording the sensor data, combined with the Node MCU ESP8266 for wireless communication (Espressif Systems, Shanghai, China). The MQ-136, MQ-137 (Winsen Electronics Technology, Zhengzhou, China), and TGS-2611 (Figaro Engineering Inc., Osaka, Japan) gas sensors are used for quantitative gas detection. The acquired data are transmitted from the sensor node to the user monitoring device/database via the ESP8266 Wi-Fi module using the internet network. The system includes a PHP-based web server which enables the visualization of the data on a laptop or mobile device and also stores the acquired data in a database. The authors did not clearly explain the advantage of using two microcontrollers (Arduino UNO + Node MCU ESP8266) at the same time when the Node MCU may be enough for data acquisition, processing, and transmission. Similar approaches have been used on [25,26,27,28,29,30,31,32,33,34,35,36,37][25][26][27][28][29][30][31][32][33][34][35][36][37].
ZigBee/XBee communication technologies have been used in 17% of the selected research. Cheung et al. developed a real-time safety monitoring system for hazardous gases [38]. The building information modeling (BIM) and the wireless sensor network (WSN) were integrated using Visual Studio and C# application to detect and alarm hazardous gases. The system consists of several compact portable/stationary sensor nodes which enable gas detection. Each sensor node has an MQ-2 gas sensor and Microsoft ARM processor (Gadgeteer (Microsoft, Albuquerque, NM, USA)) combined with a ZigBee-based wireless communication module (CC2530, Texas Instruments, Sherman, TX, USA). The sensor node has been powered by six 18650/3.6 V lithium-ion batteries, which were enough for node operation of 5–6 days. The information from the sensor node can be received by a “Coordinator” connected to the PC of the safety manager. The coordinator is a host which collects all sensor data and sends them to the monitoring PC. The system’s real-time testing results provided the exact location beside the alert and the detected gas data of any abnormal event, and also controlled the ventilation system of the place to reduce the level of detected gas concentration. Eamsa-ard et al. [39], proposed a wearable system for humanoid robots to detect several hazardous gases. The system uses an array of nine gas sensors combined with a LilyPad Arduino 328 microcontroller (Microchip Technology Inc., Chandler, AZ, USA) for data processing. The acquired data can be transferred via an XBee transmitter to a PC with an XBee receiver. The system has been tested with different VOCs such as acetone, ethanol, acetic acid, ammonia, trimethylamine, methanol, dimethylamine, and dipropyl amine. The results indicate the potential of the smart textile fabric as a consumer point-of-care wearable to track the health status and assist in detecting toxic gas leakage in the environment. Other ZigBee/XBee-based WSN has been proposed in [40,41,42,43,44][40][41][42][43][44].
The classic Bluetooth and the Bluetooth low energy (BLE) communication technologies have been used in 11% of the targeted research. Choi et al. [45], developed a reconfigurable resolution hazardous multi-gas detection prototype. It consists of a microcontroller with several sensors such as MQ-7, MQ-8, and GSNT11 (Ogam Technology Co., Kwangju, Korea) built in a single board. A Bluetooth wireless module has been used for the prototype communication with a smartphone for data post-processing and viewing. The prototype has been tested with several gases such as CO, SO2, C6H6, CO2, NO, N2 and CH4; the detected gas concentrations are displayed on the smartphone screen. Information on the power supply and the operation time of the system is not described. Heng et al. [46], proposed a hazardous chemicals detection and warning system based on an environmental mobile device. The system uses an Arduino UNO microcontroller with CO and NO2 gas sensors. The data transition is realized using a Bluetooth transmitter and receiver. The received data are processed and visualized at the android application as well as a web application that allows the data monitoring on a PC, mobile phone, or tablet. A quad-rotor Unmanned aerial vehicle for hazardous gas detection has been reported by Shi et al. [47]. The system uses an ARM-based microcontroller combined with a Bluetooth 4 communication module to send the acquired data to a mobile application for data monitoring. They used a basic MQ-2 gas sensor for the detection of C2H5OH, CO, and H2. Information on the power supply and the operation time of the system are not described.
Another group of researchers used Global System for Mobile (GSM) as a communication medium, which represents 22% of the included researches. Jualayba et al. [48], proposed a GSM-based notification hazardous gas detection system. Three basic gas sensors MQ-2, MQ-5, and MQ-8 were tested for hydrogen, LPG, and methane gases. The system is controlled by an Arduino UNO microcontroller which receives and processes the input data from the different gas sensors and sends the appropriate responses via three types of alarming and notification functions which are light signals (three-color based on danger level), buzzer, and SMS notification for the operator. The system has a limit detection distance of approximately 30 inches (76.2 cm). The paper did not include information about the power consumption and the type of power supply. Similar procedures have been used on [49,50,51,52,53][49][50][51][52][53].
2.2. Systems with Robotics Integration
Robotics have been used in several targeted research due to it is flexibility and mobility through dangerous and unsafe environments. Chang et al. [32], proposed a two-wheel robot-based multipurpose monitoring system that included a hazardous gas detection and alarming part. The system is managed by a Linux operating system based on Raspberry Pi 3 which includes a 1.4 GHz CPU, Bluetooth, and Wi-Fi functionality. The system can deal with several toxic gases and chemical vapors such as PM2.5, CO2, LPG, CO, NH3, NO2, C3H8, C4H10, CH4, H2, and C2H5OH. The system updates the gas concentration levels using Wi-Fi/4G wireless network and displays them on a smartphone application. The system did not face remote-control restrictions with the control person via the Wi-Fi network. Palacín et al. [54], proposed the use of a humanoid robot as hazardous gases leak detector for safety purposes. An array of 16 MOX gas sensors of 4 types (4* TGS 2611, 4* TGS 2620, 4* TGS 2600, 4* TGS 2602(Figaro Engineering Inc., Osaka, Japan)) has been used for the detection of some VOCs such as acetone and ethanol. The sensors array has been hosted by the assistance personal robot APR-02 which was provided beside the mobility function, the main processor STM32F407VGT6 for data processing, the power supply for the sensor array, and the wireless data transfer to the control station via a Wi-Fi communication module. The transmitted data from the robot can be viewed on a PC/Laptop. The system has been tested continuously for gas measurements and the tests show the system’s ability to detect the gas leakage not only in the direct place but also in the contiguous room with closed doors when there was a small airflow passing under the doors. Fan et al. [55], propose an emergency response system for hazardous gases and chemicals using a mobile robot with an electronic nose. The system sensing hazardous gases using a prototype sensors array called UWAR nose consists of three different material MOX sensors (tin oxide (SnO2), nickel oxide (NiO), and tungsten oxide (WO3)) and they have been used to measure the concentration of C2H5OH, C3H6O, CO, and NO2 gases. The electronic noise has been hosted by SmokeBot tank robot (www.smokebot.eu, accessed on 30 November 2021) which is designed specially to operate in dangerous environments, and it is designed as part of an experimental robotic platform called “Taurob tracker” that allow easy and quick adaptation of several sensors, detectors, and devices with the host robot. The robot transmits the sensor data via a Wi-Fi module to the control station, where the received data can be monitored using a PC/laptop system. Barber et al. [56], proposed a gas leakage inspection system for industrial environments. An infrared (IR) imaging technique using an IR camera combined with an interference filter and an IR source has been used for CH4 and CO gases detection. The gas inspection system has been fixed on a TURTLEBOT personal mobile robot (Clearpath Robotics Inc., Kitchener, ON, Canada) which has a laptop attached to it for covering the processing, communication, and navigation tasks and also provide the gas inspection system by the required power for a maximum of two hours continuous operating time. The gas inspection results can be viewed on the control station using a PC/Laptop system. Another Robotic-based system approach has been used in [57,58,59,60,61][57][58][59][60][61].
2.3. Systems Hosted by Drones/Quadcopters
Another group of researchers uses drones and quadcopters in gas detection and alarming implementation. Gallego et al. [62], presented a micro drone-based mobile hazardous gas detecting and alarming system. The system is designed to operate in dangerous, hazardous, and possible toxic gas leakages/emissions areas. An unmanned Aerial Vehicle holds the system components. It consists of the NXP JN5148 microcontroller (NXP Semiconductors Eindhoven Netherlands) adapted with the SIM-908 module which has GSM/GPRS and GPS functionality that has been required for the location information as well as for wireless communication. The used microcontroller has also a ZigBee wireless network module. The system is powered by three batteries (1.5 V, 2500 mAh, AA-type) connected in series to provide a 4.5 V operation voltage. The system uses MiCS-5121 and MiCS-5525 MOX sensors (SGX Sensortech, Corcelles-Cormondreche, Switzerland) for the detection of CO gas and VOCs. Burgués et al. [63], developed a quadcopter/based hazardous gas source localization and mapping. The gas sensing layer consists of two TGS 8100 (Figaro Engineering Inc., Osaka, Japan) MOX gas sensors used to detect gas sources, and it has been tested for ethanol C2H5OH leakage detection. The sensor has been hosted by the CrazyFlie 2.0 (Bitcraze AB, Malmö, Sweden) quadcopter which is low-cost and small size (10 × 10 cm) and has an open for integration hardware/software that makes the adding/modifying of system elements easy. The system used a powerful 32-bit Cortex-M4 STM32F405 ARM microcontroller (STMicroelectronics, Geneva, Switzerland) for data processing and driver control. The system used a 240 mAh small battery which can provide power for only 7 min and with a maximum of 15 g of payload. The CrazyFlie 2.0 communicates and exchanges sensors data and system parameters (speed, battery level, position, etc.) with the ground station using a 2.4 GHz RF band. The system information including sensors gas data has been monitored on the ground station using a PC/Laptop. Xiaoyuan et al. [64] presented a solution for the detection of hazardous gases concentrations using a quadrotor. The system gas detection layer uses the low-cost MP-3 Flat Surfaced MOX gas sensor (Winsen Electronics Technology, Zhengzhou, China) for ethanol C2H5OH detection with a measurement range of 10–1000 ppm. The sensor has been adapted on a small 60 × 60 × 31.5 cm quadrotor with 4 Omni-directional wheels, which make it fly or move on the ground based on the targeted unapproachable environment. The system communicates with the ground control station using Wi-Fi communication protocol. Shi et al. [47]. Developed a hazardous gas detection system based on a quad-rotor unmanned aerial vehicle (UAV) drone. The gas sensing layer of the system used the MQ-2 gas sensor for the detection of CO, C2H5OH, and H2. The system parameters control and the sensor’s data processing have been realized using the 32-bit Cortex-M3 STM32F103VET6 ARM microcontroller (STMicroelectronics, Geneva, Switzerland). The UAV drone communicates with the ground control station using a Bluetooth 4 communication module. The already processed gas sensor data will be received by a host computer for data monitoring, and the host computer will send the same data to targeted users using a mobile application.
References
- PennEHRS. SOP: Hazardous and Highly Toxic Gases. Available online: https://ehrs.upenn.edu/health-safety/lab-safety/chemical-hygiene-plan/standard-operating-procedures/sop-hazardous-and (accessed on 3 September 2021).
- Safeopedia. What Is Toxic Gas? Available online: http://www.safeopedia.com/definition/2337/toxic-gas (accessed on 3 September 2021).
- Matthews, G. Toxic gases. Postgrad. Med. J. 1989, 65, 224–232.
- Canary in a Coal Mine. Available online: https://en.wiktionary.org/w/index.php?title=canary_in_a_coal_mine&oldid=62946727 (accessed on 17 October 2021).
- Lin, T.; Lv, X.; Hu, Z.; Xu, A.; Feng, C. Semiconductor Metal Oxides as Chemoresistive Sensors for Detecting Volatile Organic Compounds. Sensors 2019, 19, 233.
- Saini, J.; Dutta, M.; Marques, G. A comprehensive review on indoor air quality monitoring systems for enhanced public health. Sustain. Environ. Res. 2020, 30, 6.
- Haghi, M.; Danyali, S.; Ayasseh, S.; Wang, J.; Aazami, R.; Deserno, T.M. Wearable Devices in Health Monitoring from the Environmental towards Multiple Domains: A Survey. Sensors 2021, 21, 2130.
- School of Chemical Sciences at Illinois. Toxic Gas List. Available online: https://scs.illinois.edu/resources/safety-and-facilities-management/toxic-gas-list (accessed on 27 August 2021).
- Guo, M.; Luo, N.; Chen, Y.; Fan, Y.; Wang, X.; Xu, J. Fast-response MEMS xylene gas sensor based on CuO/WO3 hierarchical structure. J. Hazard. Mater. 2021, 127471.
- Operating Principle-Electrochemical-Type Gas Sensor. Available online: https://www.figaro.co.jp/en/technicalinfo/principle/electrochemical-type.html (accessed on 23 November 2021).
- Matthey, J. Sensors for Toxic Gas Detection. Available online: https://www.technology.matthey.com/article/37/3/146-150/ (accessed on 23 November 2021).
- Liang, Y.; Wu, C.; Jiang, S.; Li, Y.J.; Wu, D.; Li, M.; Cheng, P.; Yang, W.; Cheng, C.; Li, L.; et al. Field comparison of electrochemical gas sensor data correction algorithms for ambient air measurements. Sens. Actuators B Chem. 2021, 327, 128897.
- Kang, X.; Wang, J.; Wu, H.; Liu, J.; Aksay, I.A.; Lin, Y. A graphene-based electrochemical sensor for sensitive detection of paracetamol. Talanta 2010, 81, 754–759.
- Marrazza, G.; Chianella, I.; Mascini, M. Disposable DNA electrochemical sensor for hybridization detection. Biosens. Bioelectron. 1999, 14, 43–51.
- Guth, U.; Vonau, W.; Zosel, J. Recent developments in electrochemical sensor application and technology—A review. Meas. Sci. Technol. 2009, 20, 042002.
- Wan, H.; Yin, H.; Lin, L.; Zeng, X.; Mason, A.J. Miniaturized Planar Room Temperature Ionic Liquid Electrochemical Gas Sensor for Rapid Multiple Gas Pollutants Monitoring. Sens. Actuators B Chem. 2018, 255, 638–646.
- Baron, R.; Saffell, J. Amperometric Gas Sensors as a Low Cost Emerging Technology Platform for Air Quality Monitoring Applications: A Review. ACS Sens. 2017, 2, 1553–1566.
- Ali, F.I.; Awwad, F.; Greish, Y.E.; Mahmoud, S.T. Hydrogen Sulfide (H2S) Gas Sensor: A Review. IEEE Sens. J. 2019, 19, 2394–2407.
- Liam. How Many Types of Gas Detectors Are There? Newctle. Saf. Serv. Available online: https://newcastlesafetyservicing.com/types-of-gas-detectors/ (accessed on 27 August 2021).
- Vigdor, B. 7 Types Of Industrial Gas Detectors: #7 Is The Best. Available online: https://nevadanano.com/industrial-gas-detectors/ (accessed on 27 August 2021).
- Hu, K.; Wang, F.; Shen, Z.; Liu, H.; Xiong, J. Ternary heterojunctions synthesis and sensing mechanism of Pd/ZnO–SnO2 hollow nanofibers with enhanced H2 gas sensing properties. J. Alloys Compd. 2021, 850, 156663.
- Barsan, N.; Weimar, U. 7.3.3 Fundamentals of Metal Oxide Gas Sensors. In Proceedings of the 14th International Meeting on Chemical Sensors—IMCS 2012, Nuremberg, Germany, 20–23 May 2012; pp. 618–621.
- Velladurai, V.S.; Saravanan, M.; Vigneshbabu, R.; Karthikeyan, P.; Dhlipkumar, A. Human Safety System in Drainage, Unused Well and Garbage Alerting System for Smart City. In Proceedings of the 2017 International Conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud) (I-SMAC), Palladam, India, 10–11 February 2017; pp. 6–9.
- Sanger, J.B.; Sitanayah, L.; Ahmad, I. A Sensor-based Garbage Gas Detection System. In Proceedings of the 2021 IEEE 11th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 27–30 January 2021; pp. 1347–1353.
- Nath, S.; Dey, A.; Pachal, P.; Chowdhury, S.R.; Sing, J.K.; Sarkar, S.K. Nano Structured Gas Sensing Device and Its Application in Underground Mines. In Proceedings of the 2018 IEEE Electron Devices Kolkata Conference (EDKCON), Kolkata, India, 24–25 November 2018; pp. 445–449.
- Zinnuraain, S.M.; Hasan, M.; Hakque, M.A.; Arefin, M.M.N. Smart Gas Leakage Detection with Monitoring and Automatic Safety System. In Proceedings of the 2019 International Conference on Wireless Communications Signal Processing and Networking (WiSPNET), Chennai, India, 21–23 March 2019; pp. 406–409.
- Parmar, G.; Lakhani, S.; Chattopadhyay, M.K. An IoT Based Low Cost Air Pollution Monitoring System. In Proceedings of the 2017 International Conference on Recent Innovations in Signal processing and Embedded Systems (RISE), Bhopal, India, 27–29 October 2017; pp. 524–528.
- Thomas, G.W.; Sousan, S.; Tatum, M.; Liu, X.; Zuidema, C.; Fitzpatrick, M.; Koehler, K.A.; Peters, T.M. Low-Cost, Distributed Environmental Monitors for Factory Worker Health. Sensors 2018, 18, 1411.
- Suh, J.H.; Cho, I.; Kang, K.; Kweon, S.J.; Lee, M.; Yoo, H.J.; Park, I. Fully integrated and portable semiconductor-type multi-gas sensing module for IoT applications. Sens. Actuators B Chem. 2018, 265, 660–667.
- Singh, R.; Gaur, N.; Bathla, S. IoT based Air Pollution Monitoring device Using Raspberry Pi and Cloud Computing. In Proceedings of the 2020 4th International Conference on Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 5–7 November 2020; pp. 702–707.
- Wu, Y.; Liu, T.; Ling, S.H.; Szymanski, J.; Zhang, W.; Su, S.W. Air Quality Monitoring for Vulnerable Groups in Residential Environments Using a Multiple Hazard Gas Detector. Sensors 2019, 19, 362.
- Chang, B.R.; Tsai, H.F.; Lin, Y.C.; Yin, T.K. Unmanned Mobile Multipurpose Monitoring System—iMonitor. Sens. Mater. 2021, 33, 1457.
- Mabrouki, J.; Azrour, M.; Fattah, G.; Dhiba, D.; El Hajjaji, S. Intelligent monitoring system for biogas detection based on the Internet of Things: Mohammedia, Morocco city landfill case. Big Data Min. Anal. 2021, 4, 10–17.
- Juel, M.T.I.; Ahmed, M.S.; Islam, T. Design of IoT Based Multiple Hazards Detection and Alarming System. In Proceedings of the 2019 4th International Conference on Electrical Information and Communication Technology (EICT), Khulna, Bangladesh, 20–22 December 2019; pp. 1–5.
- Joseph, T.; Naik, S.; Shaikh, A.; Phadnis, R.; Karmarkar, A.; Tyagi, K.; Khole, S.; Chaudhari, S. Portable Gas Detection and Warning System for Olfactory Disabled People. In Proceedings of the 2020 International Conference for Emerging Technology (INCET), Belgaum, India, 5–7 June 2020; pp. 1–5.
- Chávez, E.; Vidal, R.; Tejada, A.; Grados, J. Image Processing for the Detection and Monitoring of Toxic Gases in Confined Environments: An Approach for Application in Shipping Containers in Callao-Peru. In Proceedings of the 2020 6th International Conference on Mechatronics and Robotics Engineering (ICMRE), Barcelona, Spain, 12–15 February 2020; pp. 160–164.
- Jo, J.; Jo, B.; Kim, J.; Kim, S.; Han, W. Development of an IoT-Based Indoor Air Quality Monitoring Platform. J. Sens. 2020, 2020, e8749764.
- Cheung, W.F.; Lin, T.H.; Lin, Y.C. A Real-Time Construction Safety Monitoring System for Hazardous Gas Integrating Wireless Sensor Network and Building Information Modeling Technologies. Sensors 2018, 18, 436.
- Eamsa-ard, T.; Seesaard, T.; Kerdcharoen, T. Wearable Sensor of Humanoid Robot-Based Textile Chemical Sensors for Odor Detection and Tracking. In Proceedings of the 2018 International Conference on Engineering, Applied Sciences, and Technology (ICEAST), Phuket, Thailand, 4–7 July 2018; pp. 1–4.
- Benammar, M.; Abdaoui, A.; Ahmad, S.H.; Touati, F.; Kadri, A. A Modular IoT Platform for Real-Time Indoor Air Quality Monitoring. Sensors 2018, 18, 581.
- Pavani, M.; Rao, P.T. Real time pollution monitoring using Wireless Sensor Networks. In Proceedings of the 2016 IEEE 7th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 13–15 October 2016; pp. 1–6.
- Pérez-Garrido, C.; González-Castano, F.J.; Chaves-Diéguez, D.; Rodríguez-Hernández, P.S. Wireless remote monitoring of toxic gases in shipbuilding. Sensors 2014, 14, 2981–3000.
- Jero, S.E.; Ganesh, A.B. PIC18LF4620 Based Customizable Wireless Sensor Node to Detect Hazardous Gas Pipeline Leakage. In Proceedings of the 2011 International Conference on Emerging Trends in Electrical and Computer Technology, Nagercoil, India, 23–24 March 2011; pp. 563–566.
- Deshmukh, L.P.; Mujawar, T.H.; Kasbe, M.S.; Mule, S.S.; Akhtar, J.; Maldar, N.N. A LabVIEW Based Remote Monitoring and Controlling of Wireless Sensor Node for LPG Gas Leakage Detection. In Proceedings of the 2016 International Symposium on Electronics and Smart Devices (ISESD), Bandung, Indonesia, 29–30 November 2016; pp. 115–120.
- Choi, S.; Park, K.; Lee, S.; Lim, Y.; Oh, B.; Chae, H.Y.; Park, C.S.; Shin, H.; Kim, J.J. A Three-Step Resolution-Reconfigurable Hazardous Multi-Gas Sensor Interface for Wireless Air-Quality Monitoring Applications. Sensors 2018, 18, 761.
- Heng, I.; Zhang, A.; Heimbinder, M.; Yap, R. A Unique Environmental Mobile Device for Detecting Hazardous Chemicals. In Proceedings of the 2012 IEEE Global Humanitarian Technology Conference, Seattle, WA, USA, 21–24 October 2012; pp. 59–65.
- Shi, L.; Wang, X.; Zhang, T.; Hu, C.; Luo, K.; Bai, B. Hazardous Gas Detection Four-Rotor UAV System Development. In Proceedings of the 2016 IEEE International Conference on Mechatronics and Automation, Harbin, China, 7–10 August 2016; pp. 2461–2465.
- Jualayba, M.; Regio, K.; Quiozon, H.; Destreza, A. Hazardous Gas Detection and Notification System. In Proceedings of the 2018 IEEE 10th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment and Management (HNICEM), Baguio City, Philippines, 29 November–2 December 2018; pp. 1–4.
- Varma, A.; Prabhakar, S.; Jayavel, K. Gas Leakage Detection and Smart Alerting and Prediction Using IoT. In Proceedings of the 2017 2nd International Conference on Computing and Communications Technologies (ICCCT), Chennai, India, 23–24 February 2017; pp. 327–333.
- Asthana, N.; Bahl, R. IoT Device For Sewage Gas Monitoring And Alert System. In Proceedings of the 2019 1st International Conference on Innovations in Information and Communication Technology (ICIICT), Chennai, India, 26–26 April 2019; pp. 1–7.
- Karthika, S.; Vanitha, U.; Rejina, P.J.; Supraja, A.T.; Sampritha, R.V.; Srinithi, K. Toxic Gas Detection using Low Power Controller with Alert System. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 1074–1079.
- Manes, G.; Collodi, G.; Gelpi, L.; Fusco, R.; Ricci, G.; Manes, A.; Passafiume, M. Realtime Gas Emission Monitoring at Hazardous Sites Using a Distributed Point-Source Sensing Infrastructure. Sensors 2016, 16, 121.
- Kumar, A.; Kumar, M.; Singh, B. Designing and Implementaion of Smart LPG Trolley with Home Safety. In Proceedings of the 2016 2nd International Conference on Next Generation Computing Technologies (NGCT), Dehradun, India, 14–16 October 2016; pp. 185–190.
- Palacín, J.; Martínez, D.; Clotet, E.; Pallejà, T.; Burgués, J.; Fonollosa, J.; Pardo, A.; Marco, S. Application of an Array of Metal-Oxide Semiconductor Gas Sensors in an Assistant Personal Robot for Early Gas Leak Detection. Sensors 2019, 19, 1957.
- Fan, H.; Hernandez Bennetts, V.; Schaffernicht, E.; Lilienthal, A.J. Towards Gas Discrimination and Mapping in Emergency Response Scenarios Using a Mobile Robot with an Electronic Nose. Sensors 2019, 19, 685.
- Barber, R.; Rodriguez-Conejo, M.A.; Melendez, J.; Garrido, S. Design of an Infrared Imaging System for Robotic Inspection of Gas Leaks in Industrial Environments. Int. J. Adv. Robot. Syst. 2015, 12, 23.
- Faisal, M.; Alsulaiman, M.; Al-Muteb, K.; Hedjar, R.; Mathkour, H.; Emaduddin, M. Gas Detection and Mapping Using an Autonomous Mobile Robot. 2015. Available online: https://www.semanticscholar.org/paper/Gas-Detection-and-Mapping-Using-an-Autonomous-Robot-Faisal-Alsulaiman/7f0eea2bf2164511ecf993dfb738c1b1bed1350f (accessed on 2 September 2021).
- Das, T.; Sut, D.J.; Gupta, V.; Gohain, L.; Kakoty, P.; Kakoty, N.M. A Mobile Robot for Hazardous Gas Sensing. In Proceedings of the 2020 International Conference on Computational Performance Evaluation (ComPE), Shillong, India, 2–4 July 2020; pp. 62–66.
- Zhigang, N.; Lu, W. Hazardous Gas Detecting Method Applied in Coal Mine Detection Robot. In Proceedings of the 2011 Third International Conference on Measuring Technology and Mechatronics Automation, Shanghai, China, 6–7 January 2011; Volume 2, pp. 308–311.
- Joshna, V.; Kashyap, M.; Ananya, V.; Manitha, P.V. Fully Autonomous Robot to Detect and Degasify Hazardous Gas after Flood Disaster. In Proceedings of the 2019 2nd International Conference on Power and Embedded Drive Control (ICPEDC), Chennai, India, 21–23 August 2019; pp. 134–139.
- Xing, Y.; Vincent, T.A.; Fan, H.; Schaffernicht, E.; Bennetts, V.H.; Lilienthal, A.J.; Cole, M.; Gardner, J.W. FireNose on Mobile Robot in Harsh Environments. IEEE Sens. J. 2019, 19, 12418–12431.
- Gallego, V.; Rossi, M.; Brunelli, D. Unmanned Aerial Gas Leakage Localization and Mapping Using Microdrones. In Proceedings of the 2015 IEEE Sensors Applications Symposium (SAS), Zadar, Croatia, 13–15 April 2015; pp. 1–6.
- Burgués, J.; Hernández, V.; Lilienthal, A.J.; Marco, S. Smelling Nano Aerial Vehicle for Gas Source Localization and Mapping. Sensors 2019, 19, 478.
- Xiaoyuan, Y.; Jiwei, D.; Tianjie, Y.; Qingfu, Q. A Method for Improving Detection of Gas Concentrations Using Quadrotor. In Proceedings of the 2016 IEEE Information Technology, Networking, Electronic and Automation Control Conference, Chongqing, China, 20–22 May 2016; pp. 971–975.
More