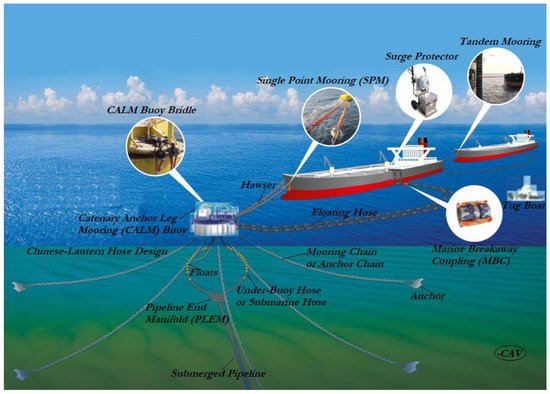
The SPM system consists of four main components, namely, the body of the buoy, the anchoring and mooring components, the fluid transfer system and the ancillary elements. Static legs linked to the seabed underneath the surface keep the buoy body in place. Above the water level, the body has a spinning portion that is attached to the offloading/loading tanker. A roller bearing, referred to as the main bearing, connects these two portions. Due to this array, the anchored tanker can easily weather-vane around the buoy and find a steady position. The concept of the buoy is determined by the type of bearing utilized and the divide between the rotating and geostatic sections. The buoy’s size is determined by the amount of counter buoyancy required to keep the anchor chains in place, and the chains are determined by environmental conditions and vessel size.
- marine hose model
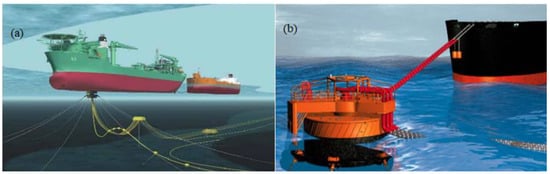
- Catenary Anchor Leg Moorings (CALM) buoy
- ocean waves
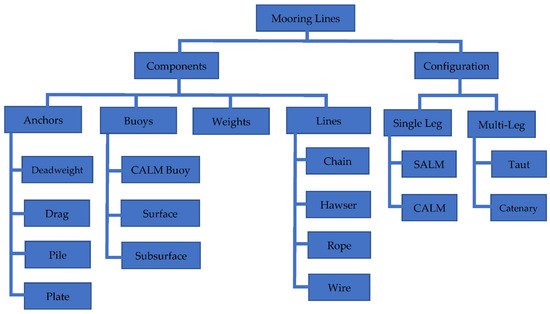
1. Categorisation of SPM Moorings

2. Components of SPM System
-
The access to the buoy deck is provided by a boat landing;
-
The buoy is protected by fenders;
-
The material handling equipment includes lifting and handling equipment;
-
Maritime visibility aids and a fog siren are used to keep moving vessels alert and attentive;
-
The navigation aids or other equipment are powered by the electrical subsystem;
-
The sources of power systems are batteries and solar systems. While the batteries are replenished on a regular basis, the solar power systems employ sun-sourced renewable energy and maintain the charge in the battery packs, for electrical power;
-
A hydraulic system can be added for remote operation with PLEM valves, if needed.
3. Components of CALM Buoy System
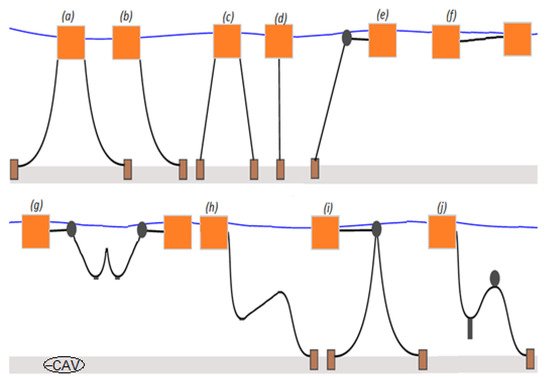
4. Different Mooring Configuration
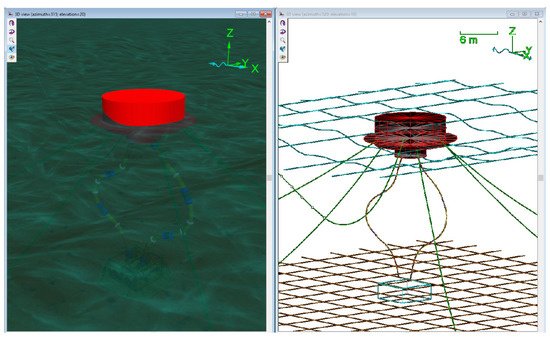
5. Review on Physical Models on Hoses and SPMs
6. FPSOs for Marine Hose Operations
References
- Trelleborg. Surface Buoyancy. Trelleborg Marine and Infrastructure: Product Brochure. 2017. Available online: https://www.trelleborg.com/en/marine-and-infrastructure/products-solutions-and-services/marine/surface-buoyancy (accessed on 17 September 2021).
- ContiTech. Marine Hose Brochure. 2020. Available online: https://aosoffshore.com/wp-content/uploads/2020/02/ContiTech_Marine-Brochure.pdf (accessed on 17 February 2021).
- ContiTech. Marine Hoses-Offshore Fluid Transfer; Continental Dunlop; Contitech Oil & Gas: Grimsby, UK, 2017; Available online: http://www.contitech-oil-gas.com/pages/marine-hoses/marine-hoses_en.html (accessed on 17 September 2021).
- ContiTech. High Performance Flexible Hoses Brochure; Continental Dunlop; Contitech Oil & Gas: Grimsby, UK, 2014.
- Alfagomma. Industrial Hose & Fittings; Alphagomma SpA: Vimercate, Italy, 2016.
- SBMO. SBMO CALM Brochure; SBM Offshore: Amsterdam, The Netherlands, 2012.
- Technip. Coflexip® Flexible Steel Pipes for Drilling and Service Applications: User’ s Guide; Technip: Paris, France, 2006.
- Trelleborg. Trelline Catalogue. Trelleborg, France. 2014. Available online: http://www2.trelleborg.com/Global/WorldOfTrelleborg/Fluid%20handling/TRELLINE%20Catalogue.pdf. (accessed on 17 May 2021).
- OIL. Offloading Hoses: Floating & Submarine Hoses-OIL Hoses Brochure; Offspring International Limited: Dudley, UK, 2014; Available online: https://www.offspringinternational.com/wp-content/uploads/2020/06/OIL-Offloading-Hoses-Brochure-2020-W.pdf (accessed on 12 July 2021).
- Maslin, E. Unmanned Buoy Concepts Grow; Offshore Engineer: New York, NY, USA, 2014; Volume 1, Available online: http://www.oedigital.com/component/k2/item/5621-unmanned-buoy-concepts-grow. (accessed on 17 May 2021).
- Xu, X.; Chen, G.; Zhu, W.; Shi, Y.; Gao, W.; Jin, W. Study on a New Concept of Offloading System for SDPSO. In Proceedings of the 30th International Ocean and Polar Engineering Conference, Shanghai, China, 11–16 October 2020.
- Oliveira, M.C. Ultradeepwater Monobuoys, OMAE2003-37103. In Proceedings of the International Conference on Offshore Mechanics & Arctic Engineering, Cancun, Mexico, 8–13 June 2003; pp. 1–10.
- Quash, J.E.; Burgess, S. Improving Underbuoy Hose System Design Using Relaxed Storm Design Criteria. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 30 April 30–3 May 1979.
- Carpenter, E.B.; Idris, K.; Leonard, J.W.; Yim, S.C.S. Behaviour of a moored Discus Buoy in an Ochi-Hubble Wave Spectrum. In Proceedings of the Offshore Technology Conference Proceeding, Houston, TX, USA, 27 February–3 March 1994; pp. 347–354. Available online: http://web.engr.oregonstate.edu/~yims/publications/OMAE1994.DiscusBuoy.pdf (accessed on 17 June 2021).
- Rampi, L.; Lavagna, P.; Mayau, D. TRELLINE? A Cost-Effective Alternative for Oil Offloading Lines (OOLs). Paper Number: OTC-18065-MS. In Proceedings of the Paper Presented at the Offshore Technology Conference, Houston, TX, USA, 1–4 May 2006.
- Prischi, N.; Mazuet, F.; Frichou, A.; Lagarrigue, V. SS-Offshore Offloading Systems and Operations Bonded Flexible Oil Offloading Lines, A Cost Effective Alternative to Traditional Oil Offloading lines. Paper Number: OTC-23617-MS. In Proceedings of the Paper Presented at the Offshore Technology Conference, Houston, TX, USA, 30 April–3 May 2012.
- Mayau, D.; Rampi, L. Trelline—A New Flexible Deepwater Offloading Line (OLL). In Proceedings of the 16th International Offshore and Polar Engineering Conference, San Francisco, CA, USA, 28 May–2 June 2006; Available online: https://onepetro.org/ISOPEIOPEC/proceedings-abstract/ISOPE06/All-ISOPE06/ISOPE-I-06-127/9875 (accessed on 17 June 2021).
- Tschoepe, E.C.; Wolfe, G.K. SPM Hose Test Program. In Proceedings of the Offshore Technology, Houston, TX, USA, 4–7 May 1981; pp. 71–80.
- Zhang, S.-F.; Chen, C.; Zhang, Q.-X.; Zhang, N.-M.; Zhang, F. Wave Loads Computation for Offshore Floating Hose Based on Partially Immersed Cylinder Model of Improved Morison Formula. Open Pet. Eng. J. 2015, 8, 130–137.
- Lebon, L.; Remery, J. Bonga: Oil Off-loading System using Flexible Pipe. In Proceedings of the Offshore Technology Conference Proceeding-OTC 14307, Houston, TX, USA, 6 May 2002; pp. 1–12.
- Asmara, I.P.S.; Wibowo, V.A.P. Safety Analysis of Mooring Hawser of FSO and SPM Buoy in Irregular Waves. In Proceedings of the Maritime Safety International Conference. IOP Conf. Ser. Earth Environ. Sci. 2020, 557, 012003.
- Løtveit, S.A.; Muren, J.; Nilsen-Aas, C. Bonded Flexibles–State of the Art Bonded Flexible Pipes; 26583U-1161480945-354, Revision 2.0, Approved on 17.12.2018; PSA: Asker, Norway, 2018; pp. 1–75. Available online: https://www.4subsea.com/wp-content/uploads/2019/01/PSA-Norway-State-of-the-art-Bonded-Flexible-Pipes-2018_4Subsea.pdf (accessed on 17 June 2021).
- Muren, J.; Caveny, K.; Eriksen, M.; Viko, N.G.; MÜLler-Allers, J.; JØRgen, K.U. Un-Bonded Flexible Risers–Recent Field Experience and Actions for Increased Robustness; 0389-26583-U-0032, Revision 5.0; PSA: Asker, Norway, 2013; Volume 2, pp. 1–78. Available online: https://www.ptil.no/contentassets/c2a5bd00e8214411ad5c4966009d6ade/un-bonded-flexible-risers--recent-field-experience-and-actions--for-increased-robustness.pdf (accessed on 17 June 2021).
- SouthOffshore. Congo BW CALM Buoy Full Replacement with New SBM Buoy Project. Djeno Terminal. South Offshore. 2018. Available online: https://www.south-offshore.com/portfolio/djeno-terminal/ (accessed on 17 May 2021).
- OIL. Mooring and Offloading Systems; Offspring International Limited: Dudley, UK, 2015; Available online: https://www.offspringinternational.com/wp-content/uploads/2015/04/OIL-SPM-Brochure-2015.pdf (accessed on 12 July 2021).
- Harnois, V. Analysis of Highly Dynamic Mooring Systems: Peak Mooring Loads in Realistic Sea Conditions. Ph.D. Thesis, University of Exeter, Exeter, UK, 2014.
- Harnois, V.; Weller, S.D.; Johanning, L.; Thies, P.R.; Le Boulluec, M.; Le Roux, D.; Soule, V.; Ohana, J. Numerical model validation for mooring systems: Method and application for wave energy converters. Renew. Energy 2015, 75, 869–887.
- Brownsort, P. Offshore offloading of CO2: Review of Single Point Mooring Types and Suitability. In SCCS (Scottish Carbon Capture and Storage); SCCS CO2-Enhanced Oil Recovery Joint Industry Project: Eaton Socon, UK, 2015; pp. 1–23. Available online: https://www.sccs.org.uk/images/expertise/misc/SCCS-CO2-EOR-JIP-Offshore-offloading.pdf (accessed on 19 July 2021).
- Gao, Z.; Moan, T. Mooring system analysis of multiple wave energy converters in a farm configuration. In Proceedings of the 8th European Wave and Tidal Energy Conference, Uppsala, Sweden, 7–10 September 2009; pp. 509–518.
- Sound and Sea Technology. Advanced Anchoring and Mooring Study; Technical Report; Oregon Wave Energy Trust: Portland, OR, USA, 2009.
- Angelelli, E.; Zanuttigh, B.; Martinelli, L.; Ferri, F. Physical and numerical modelling of mooring forces and displacements of a Wave Activated Body Energy Converter. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, San Francisco, CA, USA, 8–13 June 2014; p. V09AT09A044.
- Petrone, C.; Oliveto, N.D.; Sivaselvan, M.V. Dynamic Analysis of Mooring Cables with Application to Floating Offshore Wind Turbines. J. Eng. Mech. 2015, 142, 1–12.
- Wichers, I.J. Guide to Single Point Moorings; WMooring Inc: Houston, TX, USA, 2013; Available online: http://www.wmooring.com/files/Guide_to_Single_Point_Moorings.pdf (accessed on 17 June 2021).
- Bishop, R.E.D.; Price, W.G. Hydroelasticity of Ships; Cambridge University Press: New York, NY, USA, 2005.
- Bruschi, R.; Vitali, L.; Marchionni, L.; Parrella, A.; Mancini, A. Pipe technology and installation equipment for frontier deep water projects. Ocean Eng. 2015, 108, 369–392.
- Brebbia, C.A.; Walker, S. Dynamic Analysis of Offshore Structures, 1st ed.; Newnes-Butterworth & Co. Publishers Ltd: London, UK, 1979.
- Chandrasekaran, S. Dynamic Analysis and Design of Offshore Structures, 1st ed.; Springer: New Delhi, India, 2015.
- Bai, Y.; Bai, Q. Subsea Pipelines and Risers, 1st ed.; 2013 RePrint; Elsevier: Oxford, UK, 2005.
- Raheem, S.E.A. Nonlinear response of fixed jacket offshore platform under structural and wave loads. Coupled Syst. Mech. Int. J. 2013, 2, 111–126.
- Papusha, A.N. Beam Theory for Subsea Pipelines: Analysis and Practical Applications; Wiley-Scrivener: Hoboken, NJ, USA, 2015.
- Barltrop, N.D.P.; Adams, A.J. Dynamics of Fixed Marine Structures, 3rd ed.; Butterworth Heinemann: Oxford, UK, 1991.
- Barltrop, N.D.P. Floating Structures: A Guide for Design and Analysis; Oilfield Publications Limited (OPL): Herefordshire, UK, 1998; Volume 1.
- Wilson, J.F. Dynamics of Offshore Structures, 2nd ed.; John Wiley and Sons: New York, NY, USA, 2003.
- Bai, Y.; Bai, Q. Subsea Engineering Handbook, 1st ed.; Elsevier: Oxford, UK, 2012.
- Newman, J.N. Marine Hydrodynamics; 1999 Repri; IT Press: London, UK, 1977.
- Chakrabarti, S.K. Handbook of Offshore Engineering; Elsevier: Oxford, UK, 2005; Volume 1.
- Chakrabarti, S.K. Hydrodynamics of Offshore Structures; Reprint; WIT Press: Southampton, UK, 2001.
- Chakrabarti, S.K. Offshore Structure Modeling-Advanced Series on Ocean Engineering; World Scientific: Singapore, 1994; Volume 9.
- Chakrabarti, S.K. The Theory and Practice of Hydrodynamics and Vibration-Advanced Series on Ocean Engineering; World Scientific: Singapore, 2002; Volume 20.
- Chakrabarti, S.K. Handbook of Offshore Engineering; Elsevier: Oxford, UK, 2006; Volume 2.
- Faltinsen, O.M. Sea Loads on Ships and Offshore Structures; 1995 Repri; Cambridge University Press: Cambridge, UK, 1990.
- Païdoussis, M.P. Fluid-Structure Interactions: Slender Structures and Axial Flow, 2nd ed.; Elsevier Ltd: Oxford, UK, 2014.
- Morison, J.R.; O’Brien, M.P.; Johnson, J.W.; Schaaf, S.A. The Force Exerted by Surface Waves on Piles. J. Pet. Technol. (Pet. Trans. AIME) 1950, 2, 149–154.
- Walker, B. Dynamic Analysis of Offshore Structures; Newnes-Butterworths: London, UK, 2013.
- ABS. Rules For Building And Classing-Single Point Moorings; American Bureau of Shipping: New York, NY, USA, 2021. Available online: https://ww2.eagle.org/content/dam/eagle/rules-and-guides/current/offshore/8_rules-forbuildingandclassingsinglepointmoorings_2021/spm-rules-jan21.pdf (accessed on 17 August 2021).
- DNV. Offshore Standard: Dynamic Risers DNV-OS-F201; Det Norske Veritas: Oslo, Norway, 2010.
- DNVGL. DNVGL-OS-E403 Offshore Loading Buoys; Det Norske Veritas & Germanischer Lloyd: Oslo, Norway, 2015.
- DNVGL. DNVGL-RP-N103 Modelling and Analysis of Marine Operations; Det Norske Veritas & Germanischer Lloyd: Oslo, Norway, 2017.
- DNVGL. DNVGL-RP-F205 Global Performance Analysis of Deepwater Floating Structures; Det Norske Veritas & Germanischer Lloyd: Oslo, Norway, 2017.
- Ziccardi, J.J.; Robbins, H.J. Selection of Hose Systems for SPM Tanker Terminals. In Proceedings of the Offshore Technology Conference Proceeding-OTC 1152, Dallas, TX, USA, 21 April 1970; pp. 83–94.
- Hasselmann, K.; Barnett, T.P.; Bouws, E.; Carlson, H.; Cartwright, D.E.; Enke, K.; Ewing, J.A.; Gienapp, H.; Hasselmann, D.E.; Kruseman, P.; et al. Measurements of wind-wave growth and swell decay during the Joint North Sea Wave Project (JONSWAP). In Ergänzungsheft zur Dtsch. Hydrogr. Z. -Hydraulic Engineering Reports; Deutches Hydrographisches Institut: Hamburg, Germany, 1973; pp. 1–90. Available online: http://resolver.tudelft.nl/uuid:f204e188-13b9-49d8-a6dc-4fb7c20562fc (accessed on 4 March 2021).
- Chakrabarti, S.K. Technical Note: On the formulation of Jonswap spectrum. Appl. Ocean Res. 1984, 6, 175–176.
- Isherwood, R. Technical note: A revised parameterisation of the Jonswap spectrum. Appl. Ocean Res. 1987, 9, 47–50.
- Chibueze, N.O.; Ossia, C.V.; Okoli, J.U. On the Fatigue of Steel Catenary Risers. J. Mech. Eng. 2016, 62, 751–756.
- Pierson, W.J.; Moskowitz, L. A proposed spectral form for fully developed wind seas based on the similarity theory of S. A. Kitaigorodskii. J. Geophys. Res. Space Phys. 1964, 69, 5181–5190.
- Brady, I.; Williams, S.; Golby, P. A study of the Forces Acting on Hoses at a Monobuoy Due to Environmental Conditions. In Proceedings of the Offshore Technology Conference Proceeding-OTC 2136, Dallas, TX, USA, 5–7 May 1974; pp. 1–10.
- Pinkster, J.A.; Remery, G.F.M. The role of Model Tests in the design of Single Point Mooring Terminals. In Proceedings of the Offshore Technology Conference Proceeding-OTC 2212, Dallas, TX, USA, 4–7 May 1975; pp. 679–702.
- Nooij, S. Feasibility of IGW Technology in Offloading Hoses. Masters Dissertation; Civil Engineering Department: Delft, The Netherlands, 2006; Available online: http://resolver.tudelft.nl/uuid:4617e7a0-b5d8-4c86-94d5-8d2037b31769 (accessed on 19 July 2021).
- Lassen, T.; Lem, A.I.; Imingen, G. Load response and finite element modelling of bonded offshore loading hoses. In Proceedings of the ASME 2014 33rd International Conference on Ocean, Offshore and Arctic Engineering, OMAE2014, San Francisco, CA, USA, 8–13 June 2014.
- API. API 17K: Specification for Bonded Flexible Pipe, 3rd ed.; American Petroleum Institute (API): Washington, DC, USA, 2017.