Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 2 by Rita Xu and Version 1 by Anunay Gupta.
The adoption of Unmanned Aerial Vehicles (UAVs) in numerous sectors is projected to grow exponentially in the future as technology advances and regulation evolves. One of the promising applications of UAVs is in transportation systems. As the current transportation system is moving towards Intelligent Transportation Systems (ITS), UAVs are going to play a major role in the functioning of ITS.
- Unmanned Aerial Vehicles (UAV)
- drone
- future transportation
- intelligent transportation systems
- ITS
1. Introduction
The UAV is an aerial vehicle that does not have a human operator on board. Commonly referred to as a ‘drone,’ a UAV can fly autonomously or be piloted remotely. It is either operated remotely by a pilot on the ground or autonomously on a computer using pre-programmed flight plans or more sophisticated dynamic automation systems [1,2][1][2]. According to the degree of remote and/or automatic control, a UAV can be categorized as either expendable or recoverable [3]. Expendable UAVs are usually one-time use UAVs that are relatively more significant in a military context than for civil purposes. An example of expendable UAVs is kamikaze drones, which are designed to attack targets by crashing into them. On the other hand, recoverable UAVs refer to the UAVs that can be recovered and recycled after use. Civilian UAVs are usually considered to be recoverable drones [4]. Due to their unmanned capability, UAVs tend to offer a safer operating environment when compared to manned-aerial vehicles if appropriately regulated. A UAV can be an option for more dangerous missions and tasks without risking any operator’s life. From the operational perspective, one major drawback is that UAVs have a relatively short flight, as compared to regular aircraft. Additionally, due to their size, which is often smaller than manned-aerial vehicles, UAVs are easily affected by the weather, and their maneuverability remains a challenge in bad weather conditions.
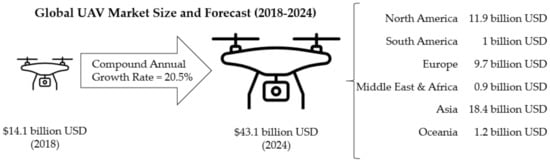
Starting with aerial recordings of world views, UAVs are already being implemented in various applications such as wildfire mapping, agricultural surveys, buildings and bridges inspections, powerlines surveys, pipelines monitoring, and many others. In the near future, the UAV industry will play a pivotal role in global technological advancement. At the time of writing, the emerging UAV-related market is valued at over 127 billion dollars, and this industry is predicted to create more than 100,000 new jobs [5]. Figure 1 highlights the global market size of UAVs in 2018 and the forecasted market size in 2024 for the different regions of the world [6].
UAVs are often used for surveillance with their onboard camera. They can carry equipment other than cameras as well and can even deliver small loads. The military sector has extensively used UAVs for combat and humanitarian aid [7]. About 70% of UAVs available are used by the military sector, 17% by the consumer sector, followed by 13% used by the commercial sector. Although the military sector is the biggest market for UAVs right now, the commercial business sector has the fastest growth opportunity. Currently, the infrastructure sector seems to have the highest growth potential, followed by the agriculture and transportation sector [8]. Due to UAVs’ enormous growth potential and market interest combined with the rapid advancement of technology and regulations, research on UAV-related applications and their capabilities is also rapidly increasing [9].
In recent years, the usage of UAVs in commercial industries has escalated, and UAVs are being deployed for various diverse tasks in different sectors. In the agriculture industry, farmers are using UAVs for crop data collection to help improve crop yields. UAVs are proving to be pivotal in environmental conservation efforts by providing detailed forest vegetation and water maps. They are also being used for indoor mapping and inspection by the mining industry, leading to improved worker safety. In the construction industry, UAVs are increasingly being used for mapping and surveying construction sites. This approach has claimed to result in saving both time and cost. Police, firefighters, and other rescue personnel have adopted the use of UAVs in recent years for surveillance, search and rescue, and public safety efforts. The high-resolution aerial photography and videography capabilities of UAVs have been extensively used by the film and entertainment industry.
The existing ground transportation infrastructure has become more congested each year with an increasing number of cars and reduced road capacity levels [10]. It was reported that in 2019, an average of drivers in the United States (US) lost about 99 h due to traffic congestion [11]. Many technologies and logistics industries have started to shift goods by employing UAVs to ease the unsolvable traffic congestion issues. UAVs are beginning to emerge and are slowly integrated into the current transportation infrastructures. UAVs can drastically change and become an integral part of the future transportation sector in the near future. The progress and advancement in UAV’s capabilities have led to their usage in many different areas of the transportation sector.
The global UAV-assisted logistics and transportation market is proliferating, with projected market size of about 11 billion dollars by 2026, from about 5.3 billion dollars in 2019 [12]. UAVs have been employed for logistic delivery purposes in medical, e-commerce, and backyard delivery [13]. The rapid growth of UAV usage is primarily observed due to the emerging e-commerce market and growing customer expectations of faster delivery times. UAVs are also being integrated into other transportation sectors like urban planning and management, traffic monitoring, and disaster response or relief. With more and more vehicles being automated nowadays, in the future, UAVs will play a crucial part in developing a fully automated transportation system and assist in the form of the automated field support team, traffic police, road surveys, and rescue teams [14].
Despite their various potential applications, there are some limitations and concerns regarding UAVs use. Some of the issues include intrusion of privacy, UAV collisions due to loss of control, hacking, and other security issues [15,16][15][16]. These issues need to be overcome before full-fledged active deployment in real-life transportation systems becomes a reality [16]. To employ UAVs successfully in future transportation systems, it is crucial to have comprehensive knowledge about the current and potential advancements of UAVs, their challenges, and opportunities of usage in the transportation sector. Thus, this paper provides concise analyses and reviews of some recent advances of UAVs and their roles in the current and future transportation systems.
2. UAVs Overview
An overview of UAVs is provided in this section for a better understanding of the readers. This section explains the fundamentals of UAVs, including their general specifications, performance measures, network and communications, software architecture, and privacy and security concerns.
2.1. General Specifications
A UAV uses aerodynamic forces to provide vehicle lift. UAVs can be classified into two broad categories based on the vertical lift style: rotary-wing and fixed-wing [17,18][17][18]. Rotary-wing UAVs, also known as multi-rotors, are fundamentally rotorcraft with two or more rotors to generate lift. They can then be split up into subdivisions by the number of propellers that give the UAV vertical thrust. There are six specific subdivisions: bicopters, tricopters, quadcopters, pentacopters, hexacopters, and octocopters, refer to two, three, four, five, six, and eight-rotor, respectively. A facet of these types of UAVs is the vertical take-off and landing (VTOL) capabilities.
Fixed-wing UAVs are very energy efficient as they utilize their ability to glide to save on the fuel or energy source they are using. The most significant limitation with this UAV is the requirement of some catapult or runway for take-off and a runway for landing. They only can take off like an aircraft in the horizontal direction. Fixed-wing UAVs are generally more stable and larger, with more excellent flying capabilities, payload capacity, and endurance, but these UAVs are not as agile as multi-rotor because of their size. The hybrid UAVs take the functionality of both multi-rotor and fixed-wing. This specific type of UAV is still in the works. However, those working on it are attempting to combine the VTOL capabilities of the rotary-wing UAVs and the gliding capabilities of the fixed-wing UAVs.
When it comes to UAV structures, there is a general convention with the shape in all types. In multi-rotors, there are propellers attached to the center body via booms. Inside the propeller mechanisms, there are brushless motors and inside the body is the power source. The propellers are pointed upwards, so the UAV can remain at a constant altitude and use its VTOL capabilities. In fixed-wing, the body of the UAV typically has two wings, which often have propellers for horizontal thrust attached along the sides. As previously stated, this type is very similar to aircraft, and they use the same methods to take off cruising and landing. The major limitation to the fixed-wings is the take-off, and the rotary-wings are cruising because of battery consumption. The hybrids aim to circumvent both by taking the VTOL of the rotary wings and the cruising capabilities of the fixed-wing. Therefore, most hybrids have wings, but also propellers that provide vertical thrust [19].
2.2. Performance Measure
Specific types of UAVs have many uses throughout the public, private enterprises, and the military. In the public sector, UAVs are used more for recreational use. These UAVs are typically smaller and lightweight (<2 kg) rotary or fixed-wing UAVs. Private companies mostly use slightly larger (2 kg to 150 kg) rotary-wing and hybrid UAVs. The uses of these UAVs range from delivery of packaging to aerial photography to crop dusting to powerline inspection. The military uses mostly fixed-wing UAVs for tasks such as armed reconnaissance or surveillance. These UAVs are much larger in size and weight than the public or private sectors (>25 kg) [17].
When discussing a UAV’s performance measure, it is integral to look at many things, such as maximum payload, the mass of the UAV, endurance, ceiling altitude, range of operation, and the flying mechanism. Table 1 summarizes performance measures of general rotary-wing, fixed-wing, and hybrid UAVs.
| Flight Mechanism * | Rotary-Wing | Fixed-Wing | Hybrid |
|---|---|---|---|
| Mass (kg) | 0.01 to 100 | 0.1 to 400,000 | 1.5 to 65 |
| Payload (kg) | 0 To 50 | 0 to 1000 | 0 to 10 |
| Ceiling altitude (km) | 4 | 0.1 to 30 | n/a |
| Endurance (min) | 6 to 180 | 60 to 3000 | 180 to 480 |
| Range (km) | 0.05 to 200 | 2 to 20 mil | n/a |
| Energy source | Battery | Fuel or Battery | Fuel or Battery |
* These are estimated ranges from the references as they are specific for the specific UAV modes, but not flight group, or they did not cover all categories listed.
The payload is typically referred to as the maximum weight that a UAV can carry. The payload of a UAV could be a camera on a more miniature public-use UAV or a missile on a military-use UAV. The endurance refers to the maximum flight time of the UAV. The endurance of a UAV directly relates to the energy source, typically fuel or battery. Thus, it is also essential to consider a UAV based on its power needs and source. The ceiling altitude refers to the highest a UAV can fly. The distance from which a UAV can be controlled remotely is called its range [17].
2.3. UAV Networks and Communications
As it has been made clear previously, there are many types and uses for UAVs. This can be attributed to the components present and many vital systems, their communication and networking with other UAVs, navigation capabilities, and the software interactions in between these systems.
2.3.1. General Systems
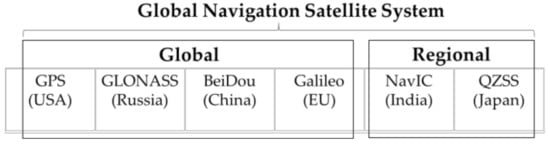
Every UAV is different in that not every model has the same systems nor the capabilities of another. Many autonomous UAVs are equipped with a global positioning system (GPS) or global navigation satellite system (GNSS), but UAVs that are a little less advanced and require a remote pilot are not equipped with such systems [24]. GNSS is a generic term used to describe the various types of satellite navigation systems worldwide. GNSS applications for UAVs include positioning, navigation, and timing services. GPS is the most prevalent GNSS, and it is owned and operated by the United States. Figure 32 describes the various satellite systems of different countries that are typically included in GNSS.
UAVs equipped with GPS or GNSS typically can fly farther than those not equipped with either. Additionally, autonomous UAVs, or UAVs that do not require human intervention, is the UAV group kitted with the more independent systems. They are, in many cases, equipped with advanced navigation, collision avoidance, and environment detection systems, among others [26]. In the context of UAVs, the terms ‘autonomous’ and ‘automated’ are often used interchangeably, but these terms refer to different concepts. Automated systems are often limited in their tasks, and these systems function within a well-defined set of parameters. In contrast, an autonomous system is adaptive in nature and evolves following the environment around it. Autonomous UAV systems are built on the foundation of artificial intelligence and underlying machine learning capabilities, due to which they can adapt to dynamic environments [27].
2.3.2. Communications and Networks Systems
When discussing UAV networking and communications, a few definitions are needed. Three different types of aerial entities can be used as terrestrial networking: Low Altitude UAVs (LAUs), High Altitude UAVs (HAUs), and satellites. Through these entities, there is a sort of communication network. The LAUs and HAUs can communicate to each other, or other UAVs of that class, on an Air-to-Air (A2A) channel. HAUs communicate with the satellites on a Satellite-to-Air (S2A) channel. LAUs can communicate with ground objects on an Air-to-Ground (A2G) channel. This set of communication channels help develop the UAV assistance paradigm.
LAUs have many disadvantages as they are typically quadcopters, and so they have lower flight endurance, little geographical data, and lower payload capacity. Disregarding these disadvantages, LAUs are much cheaper and faster to deploy [21]. LAUs are commonly connected via a local area network (LAN) [28]. HAUs, as they are primarily found in fixed-wing, last longer in the air and are more energy-efficient to provide more extended coverage. The major drawback to this type of UAV is its cost and the possibility of interference in the networks. The satellites in this paradigm are often used to manage the HAUs’ and LAUs’ networks [21].
2.3.3. Navigation Systems
There are two general ways a UAV can move around. In automatic UAVs, a controller is used by the pilot and typically operated through the pilot’s vision or a camera on the UAV. In autonomous UAVs, there are navigation systems. They have this for the apparent reason of no one piloting them. These navigation systems need to be extensively precise [26]. These UAVs are often fitted with a GPS or GNSS device to get the UAV’s location. This would then translate to the navigation and autopilot software to find the UAV’s bearing and distance left.
Because location, bearing, and distance are all variable during a flight mission, the GPS/GNSS systems send data frequently so the UAV autopilot can control the direction of flight [24]. Patrick et al. proposed a method of navigation that is extremely simple for the delivery of UAVs [24]. After the user inputs the target location, the UAV is to accept this data. Once accepted, the UAV uses the navigation systems to reach this location. After landing at the target, the UAV returns to its home (the take-off point), where it is to wait for another set of target data. Then, the UAV would repeat the process.
A significant navigation system goal is to reduce the probability of a crash and when pathfinding puts into account: stealth, feasibility, performance, and implementation. With stealth, many UAVs are used in dangerous environments; therefore, it is paramount to avoid detection. Feasibility refers to the physical capabilities regarding endurance and path length. Performance looks at minimum altitude and flight angles (turning, climbing, and diving). Implementation is likely the most important when stealth is not as important. Implementation refers to the actual efficiency of the route calculated [29].
2.3.4. Software Architecture
Previously, it was stated that LAUs were connected via LANs. A LAN is a network that connects processing systems, in this case, UAVs, in a localized area. In a LAN, a system can run multiple applications at once, meaning a UAV and a group of interconnected UAVs can do multiple tasks at once [28]. In a singular, autonomous UAV, the LAN helps the software programs communicate with each other and the flight hardware/external systems.
The general layout of the software systems includes the autopilot software, the navigation system, and the communication system [24]. This autopilot software can be broken into three levels: the execution level, the coordination level, and the organization level. These three levels all communicate with each other throughout the UAV’s flight. The least intelligent but most precise level is the execution level. The execution level is responsible for sensing the UAV’s surroundings as well as detecting failures. The middle level is the coordination level. The coordination level is responsible for mainly navigation, processing data, and trajectory planning. The least precise but most intelligent level is the organization level. This level is responsible for communication with other UAVs and the ground in A2G and A2A networks and decision-making [26].
In order to perform various tasks, different UAVs have varying speeds and ranges. Hence, they require different communication methods. The selection of the most compatible wireless communication methods and communication protocols greatly boosts the efficiency of UAVs [30]. The autopilot software platforms for UAVs, like ArduPilot and PX4, use certain communication protocols for UAV monitoring, control, and integration into the internet. These protocols comprise a set of messages exchanged between the UAV and ground stations. Micro Aerial Vehicle Link (MAVLink) is the most popular protocol for UAVs, which ensures bidirectional communication between the UAVs and the ground stations. MAVLink is a lightweight protocol that is apt for transmitting small amounts of data over wireless mediums [31].
2.3.5. Swarms
With the advancement of UAV systems, their usage is increasing. This also means the number of applications is increasing. When one looks at a singular UAV, the tasks that they can do are outstanding. A significant problem with a singular UAV is that they are generally slow and not very time efficient on their own. To increase efficiency, more UAVs can be implemented.
In general, a group or fleet of UAVs that work together to achieve a holistic goal is known as a swarm of UAVs. In addition to swarm, different terms are employed for multiple UAV systems based on the number of UAVs deployed. Ref. [32] provided three such classifications—teams, formations, and swarms. A ‘team’ is said to have less than ten UAVs working individually in a cooperative or competitive manner. ‘Formations’ have about tens or more of UAVs that usually interact cooperatively. ‘Swarms’ refer to a relatively larger UAV group consisting of dispensable units, in which the local interaction can be either competitive or cooperative. Ref. [33] proposed a similar classification, where multiple teams are termed a ‘squadron,’ and all squadrons collectively form a ‘group’ of UAVs.
Figure 43 depicts the pictorial representation of a UAV swarm controlled by an integrated control system. There are a variety of applications that multiple UAVs are helpful for. Video surveillance, photogrammetry, providing cellular networks, traffic monitoring, Simultaneous Localization and Mapping (SLAM), and search and rescue are just some of the applications of multiple UAVs [33].
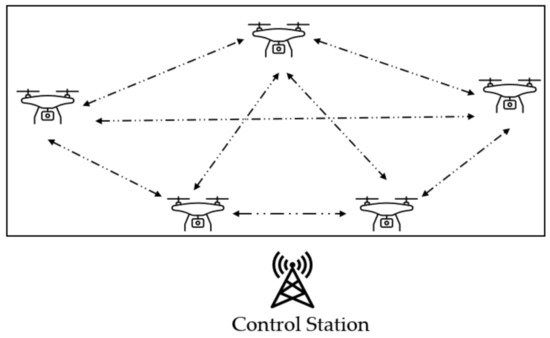
Figure 43. A representation of a UAV swarm.
2.4. UAV Security and Privacy
The use of UAVs in various sectors of the industry is rapidly growing as technology advances. However, privacy and security concerns, including proneness to hacking or theft, invasion of privacy, and collision liability, still need to be considered before the large-scale implementation of UAVs in ITS [34]. UAVs cover large areas and often fly in populated areas. This makes the system prone to hacking, and a UAV lacking security detrimental [33]. The weakness of UAV security was investigated in Ref. [35]. There are five ways a cyber-terrorist may hack and disrupt UAV usage, and most of them are highly likely to occur. The first method is signal jamming. In jamming, the culprit generates interference signals at a similar frequency band to disrupt the UAV’s reception [17,36][17][36]. Another way of hacking is eavesdropping. In this method, the hacker uses the cellular/Wi-Fi signal produced by the UAV to obtain the information being transmitted. Hijacking is yet another way a cyber-terrorist may misuse a UAV. In this case, the hijacker disrupts a UAV A2G channel and takes control of the UAV [17]. The following way a hacker may misuse the targeted UAV is by spoofing. In spoofing, the hacker acts like an entity with false information. Spoofs typically disrupt the UAV’s GPS signals [17,36][17][36]. The last way a cyber-terrorist could threaten a UAV is through Denial of Service (DoS). In a DoS attack, the hacker will send out many server requests, causing congestion in the network, and users will lose UAV service [17,37][17][37]. To prevent attacks such as eavesdropping or hijacking, higher levels of encryption would need to be put into place. In cases of jamming, one could implement a higher signal-to-noise ratio (SNR), but the power consumption in the UAV limits this method. For spoofing, one could implement a multi-antenna defense [17].
UAVs can intervene in residents’ privacy if the flying path is close to the residences in urban areas, as most UAVs are equipped with cameras. Another issue is the noise of the UAVs, which might become a source of annoyance to the residents. UAV’s photography capabilities can be misused. To combat this issue, a set of strict regulations and policies must be put in place by the government, such as the right for individuals to register their home address as a no-fly zone. When the issue involves national security, advanced detection technologies of unregistered drones can be implemented [38]. Moreover, other information such as the GPS location and time can be used to track anyone. Another way a user’s privacy can be breached is through malicious software. In a few cases, this software can steal information from the user, such as the application data, if the UAV is operated from the user’s cellular device.
Due to these safety risks and privacy concerns, the use of UAVs must be supervised and regulated by the government or the equivalent of the Federal Aviation Administration (FAA) for countries outside the US. The three main aspects of UAV regulations are controlled use of airspace by UAVs, operational limitations, and administrative procedures such as flight permits, pilot licenses, and data collection authorization [39].
References
- Škrinjar, J.P.; Skorput, P.; Furdić, M. Application of Unmanned Aerial Vehicles in Logistic Processes. In New Technologies, Development and Applications; Springer: Cham, Switzerland, 2018; pp. 359–366.
- Skorput, P.; Mandzuka, S.; Vojvodic, H. The use of Unmanned Aerial Vehicles for forest fire monitoring. In Proceedings of the 2016 International Symposium ELMAR, Zadar, Croatia, 12–14 September 2016; pp. 93–96.
- Larm, D. Expendable remotely piloted vehicles for strategic offensive airpower roles. In Air Univ Maxwell Afb al School of Advanced Airpower Studies; Air University Press: Montgomery, AL, USA, 1996.
- Bernauw, K. Drones: The emerging era of unmanned civil aviation. Zb. PFZ 2016, 66, 223.
- Yadav, A.; Goel, S.; Lohani, B.; Singh, S. A UAV Traffic Management System for India: Requirement and Preliminary Analysis. J. Indian Soc. Remote Sens. 2020, 49, 515–525.
- Schroth, L. The Drone Market 2019–2024: 5 Things You Need to Know. Available online: https://droneii.com/the-drone-market-2019-2024-5-things-you-need-to-know (accessed on 15 May 2021).
- Scott, J.; Scott, C. Drone delivery models for healthcare. In Proceedings of the 50th Hawaii International Conference on System Sciences, Hilton Waikoloa Village, HI, USA, 4–7 January 2017.
- Castellano, F. Commercial Drones Are Revolutionizing Business Operations. Available online: https://www.toptal.com/finance/market-research-analysts/drone-market (accessed on 28 March 2019).
- Chan, K.W.; Nirmal, U.; Cheaw, W.G. Progress on drone technology and their applications: A comprehensive review. In AIP Conference Proceedings; AIP Publishing LLC.: Melville, NY, USA, 2018.
- Afrin, T.; Yodo, N. An Evaluation on Current Traffic Congestion Measures. In IIE Annual Conference. Proceedings; Institute of Industrial and Systems Engineers (IISE): Peachtree Corners, GA, USA, 2020.
- Afrin, T.; Yodo, N. A probabilistic estimation of traffic congestion using Bayesian network. Measurement 2021, 174, 109051.
- CISION. Drone Logistics and Transportation Market Size to Reach USD 10,990 Million by 2026 at CAGR 10.8%. Available online: https://www.prnewswire.com/in/news-releases/drone-logistics-and-transportation-market-size-to-reach-usd-10-990-million-by-2026-at-cagr-10-8-valuates-reports-857193310.html (accessed on 25 May 2021).
- Roca-Riu, M.; Menendez, M. Logistic deliveries with drones: State of the art of practice and research. In Proceedings of the 19th Swiss Transport Research Conference (STRC 2019), Ascona, Italy, 15–17 May 2019.
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-Enabled Intelligent Transportation Systems for the Smart City: Applications and Challenges. IEEE Commun. Mag. 2017, 55, 22–28.
- Erdelj, M.; Natalizio, E. UAV-assisted disaster management: Applications and open issues. In Proceedings of the 2016 international conference on computing, networking and communications (ICNC), Kauai, HI, USA, 15–18 February 2016; pp. 1–5.
- Zhi, Y.; Fu, Z.; Sun, X.; Yu, J. Security and Privacy Issues of UAV: A Survey. Mob. Netw. Appl. 2019, 25, 95–101.
- Fotouhi, A.; Qiang, H.; Ding, M.; Hassan, M.; Giordano, L.G.; Garcia-Rodriguez, A.; Yuan, J. Survey on UAV Cellular Communications: Practical Aspects, Standardization Advancements, Regulation, and Security Challenges. IEEE Commun. Surv. Tutorials 2019, 21, 3417–3442.
- Brien, T.; Abrahamsen, H.B.; Zamarro, A.; Valls, M.; Badia, O.; Guasch, J.; Ioannidis, D.; Votis, K.; Palaskas, C.; Rogotis, S.; et al. Remote Piloted Airborne Systems (RPAS) and the Emergency Services; E.E.N. Association: Brussels, Belgium, 2015.
- Lee, C.; Kim, S.; Chu, B. A Survey: Flight Mechanism and Mechanical Structure of the UAV. Int. J. Precis. Eng. Manuf. 2021, 22, 1–25.
- Puri, A. A Survey of Unmanned Aerial Vehicles (Uav) for Traffic Surveillance; Department of Computer Science and Engineering, University of South Florida: Tampa, FL, USA, 2005; pp. 1–29.
- Alzahrani, B.; Oubbati, O.S.; Barnawi, A.; Atiquzzaman, M.; Alghazzawi, D. UAV assistance paradigm: State-of-the-art in applications and challenges. J. Netw. Comput. Appl. 2020, 166, 102706.
- Ozdemir, U.; Aktas, Y.O.; Vuruskan, A.; Dereli, Y.; Tarhan, A.F.; Demirbag, K.; Erdem, A.; Kalaycioglu, G.D.; Ozkol, I.; Inalhan, G. Design of a Commercial Hybrid VTOL UAV System. J. Intell. Robot. Syst. 2013, 74, 371–393.
- Özbek, E.; Yalin, G.; Ekici, S.; Karakoc, T.H. Evaluation of design methodology, limitations, and iterations of a hydrogen fuelled hybrid fuel cell mini UAV. Energy 2020, 213, 118757.
- Patrik, A.; Utama, G.; Gunawan, A.; Chowanda, A.; Suroso, J.S.; Shofiyanti, R.; Budiharto, W. GNSS-based navigation systems of autonomous drone for delivering items. J. Big Data 2019, 6, 53.
- GPS.gov. Other Global Navigation Satellite Systems (GNSS). Available online: https://www.gps.gov/systems/gnss/ (accessed on 15 April 2021).
- Chen, H.; Wang, X.-M.; Li, Y. A survey of autonomous control for UAV. In Proceedings of the 2009 International Conference on Artificial Intelligence and Computational Intelligence, Shanghai, China, 7–8 November 2009.
- Haddal, R.; Hayden, N.K. Autonomous Systems Artificial Intelligence and Safeguards; Sandia National Lab. (SNL-NM): Albuquerque, NM, USA, 2018.
- Pastor, E.; Lopez, J.; Royo, P. UAV Payload and Mission Control Hardware/Software Architecture. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 3–8.
- Zhao, Y.; Zheng, Z.; Liu, Y. Survey on computational-intelligence-based UAV path planning. Knowl.-Based Syst. 2018, 158, 54–64.
- Han, M. Authentication and Encryption of Aerial Robotics Communication; San Jose State University: San Jose, CA, USA, 2019.
- Koubaa, A.; Allouch, A.; Alajlan, M.; Javed, Y.; Belghith, A.; Khalgui, M. Micro Air Vehicle Link (MAVlink) in a Nutshell: A Survey. IEEE Access 2019, 7, 87658–87680.
- Chung, S.-J.; Paranjape, A.A.; Dames, P.; Shen, S.; Kumar, V. A Survey on Aerial Swarm Robotics. IEEE Trans. Robot. 2018, 34, 837–855.
- Skorobogatov, G.; Barrado, C.; Salamí, E. Multiple UAV Systems: A Survey. Unmanned Syst. 2020, 8, 149–169.
- The Impact of Drones on Supply Chain Management. Available online: https://www.americanexpress.com/us/foreign-exchange/articles/drones-impact-supply-chain-management/ (accessed on 1 March 2021).
- Rodday, N. Hacking a Professional Drone. Black Hat Asia. 2016. Available online: https://www.blackhat.com/docs/asia-16/materials/asia-16-Rodday-Hacking-A-Professional-Drone.pdf (accessed on 6 August 2021).
- Sathyamoorthy, D. A review of security threats of unmanned aerial vehicles and mitigation steps. J. Def. Secur. 2015, 6, 81–97.
- Goethals, P.L.; Yodo, N. Insider Attack Metrics for Cybersecurity: Investigating Various Research Options. In IIE Annual Conference. Proceedings; Institute of Industrial and Systems Engineers (IISE): Peachtree Corners, GA, USA, 2019.
- Yodo., N.; Goethals, P.L. Cybersecurity Management via Control Strategies for Resilient Cyber-Physical Systems. In IIE Annual Conference. Proceedings; Institute of Industrial and Systems Engineers (IISE): Peachtree Corners, GA, USA, 2019.
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 459.
More