Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 2 by Lily Guo and Version 3 by Lily Guo.
In recent years, social robots have become part of a variety of human activities, especially in applications involving children, e.g., entertainment, education, companionship. The interest of this work lies in the interaction of social robots with children in the field of special education.
- social robots
- child–robot interaction
- special education
1. Introduction
There is no doubt that in recent years we have witnessed the Fourth Industrial Revolution, the so-called Industry 4.0 [1] in Europe and Society 5.0 [2] in Japan. Among the main features of this technological advancement is the use of artificial intelligence algorithms in processing the available large volume of data and making decisions from it. The role of robotic systems appears to be enhanced in the field of executing specific actions based on the derived decisions.
In this context, there is a growing trend in the application of robots outside of industrial workplaces, in people’s daily lives, through the development of the so-called cyber-physical systems. As a direct consequence of this high integration of robots into society, the term social robots has been adopted [3] to include the new generation of robotic systems that interact with humans in daily activities such as entertainment [4][5][6], healthcare [7][8], and education. An outstanding work about the social acceptance of robots in different application fields is presented systematically in [9].
The field of application of social robots in the education of children is of paramount interest for the following important reasons: (1) the education of the young people in each country is a critical factor for maintaining and promoting the culture and traditions of each nation and (2) the provision of specialized education services to children with various impairments contributes to their integration into the society with equal opportunities and rights by fighting the social exclusions. Additionally, in the particular conditions that humanity is experiencing, such as the current pandemic of COVID-19, the need for distance education of special categories of children can be met to a satisfactory degree with the use of social robots [10].
In recent years, several approaches have been proposed for the use of social robots in the education of adults, with the robot participating in the educational process with multiple roles, as a presenter, teaching assistant, teacher, peer, or tutor [11]. Recent studies have highlighted the great acceptance of social robots by children and their parents [12][13]. Children are very willing to interact with social robots for the following reasons: (1) children treat robots not just as simple machines but as cute toys; (2) robots gain children’s attention because of their childlike appearance, while they have many interactive abilities (movements, sounds, colored lights, etc.); (3) social robots have the patience to teach children through many repetitions without getting tired; and (4) social robots are emotionally and behaviorally stable during their interaction with children.
The aforementioned advantages of using social robots in the educational process are much more valuable when the children interacting with the robots have some impairment. In these cases, the educational process is adapted to the special requirements of the children, with social robots being the center of attention for children. For example, in the case of children with autism, a critical factor in the effectiveness of an educational process is the children’s engagement in the lesson, as they present several difficulties in concentrating their attention. In this regard, several attempts to study the degree of children’s engagement during the lesson, as well as to develop ways to attract children’s attention in social robots, have been presented [14][15]. To this end, several multimodal behavioral analysis methods have been proposed [16][17]. Summarizing, the study of the methodologies applying social robots in special education is of particular interest, as it includes several scientific and technological challenges for various scientific disciplines, e.g., child psychology, developmental psychology, cognitive science, neuroscience, computer science.
2. Robots—Taxonomy
An in-depth study of the published research efforts to integrate social robots into special education has highlighted the wide variety of social robots that have been developed and tested in a highly diverse set of experiments with children with various impairments. The need for the most useful social robots has led the market to design and produce a wide range of social robots with varying features (tTable 16 and tTable 27). Among other things, this has highlighted the need for a customized methodology for developing [18] and selecting [19] social robots for specific applications.
In this section, an attempt is made to record the various types of social robots that have been applied in special education, with the ultimate goal of concluding the suitability of each type of robot for each category of impairments.
2.1. NAO Robot
A significant number (46%, N = 47) of studies used the NAO robot and it seems that in almost all the cases, NAO was used to help children with ASD. In other examples, it was also used to help children with multiple disabilities (from which most cases were with at least one of the disabilities being ASD), intellectual disabilities, Down syndrome, cerebral palsy, oncological disorders, physical disabilities and hearing impairments. In most cases, a humanoid robot is required as during the interaction between the robot and the child, the child had to imitate the robot’s movements to improve its joint attention skills, mobility, or carry out other kinds of body exercises. This makes the choice of NAO robot more suitable as the movements can be programmed easily, with the help of its desktop program and its degrees of freedom to move. In addition to movement exercises, it was also used in cases of learning sessions and social interactions, where the children interacted by talking to each other.
2.2. Kaspar Robot
Kaspar, the second most popular social root (6%, N = 6), was used in studies that focused on children with ASD, Down syndrome and multiple disabilities (from which one was also ASD). Kaspar’s humanoid body and features seem to help more children with ASD. In some of the studies, Kaspar was used with the intention of exploring and measuring its potentials in the improvement of children’s general behavior by playing games and participating in play scenarios.
2.3. Lego Mindstorms
Different kinds of robots can be built with the Lego Mindstorms (the third most popular social root, used in five studies (4.85%) used this kind of robot) set. In most cases, the particular set was used to build robots that were applied to studies with children with diverse disabilities, such as ASD, multiple disabilities, cerebral palsy, Down syndrome, developmental disorder and other movement disabilities. Due to its design, the robot can be either a non-humanoid (a vehicle) or a humanoid robot. The interactions of the studies that this robot was used in vary. In some studies, the robot was used in training, learning, or working sessions, workshops and play sessions. This indicates that the robot, or the building set in general, can be used to build a robot for different kinds of interactions. In addition to that, a study conducted workshops with the particular set, in which the children had to build a robot using the set. As a result, children with movement impairments were also able to improve their mobility by building a robot with the help of other teachers participating.
In all cases, the robot was the main interaction of the child, with the exception of one, in which it was supporting the learning of the child; in other cases, the child was not alone during the interaction, with the researcher being present, or in one case, where the child was accommodated with their mother.
2.4. iRobiQ Robot
The iRobiQ robot was used in studies including children with ASD (or in one case, PDD-NOS). It seems that the design of the robot is mostly targeted to children with ASD impairment and the robot itself to be used in the context of interactions that aim to improve the communication and syntactic skills, or other skills that are closely related to those. In most cases, the robot was used as a tool to assist the teachers during the interaction between them and the children, by providing instructions or other assistive cues to the children. Additionally, it was used [20] to teach attention, communication and social skills to children with ASD by playing a card game and providing assistance and feedback during the game. It is a non-humanoid robot with a display that was used to play the card game, through which it provided the feedback in combination with its head.
2.5. Iromec Robot
Iromec robot was mostly used in studies where the children had multiple disabilities, Down syndrome or ASD. Iromec is a non-humanoid robot with a visual interface that can show the robot’s expressions and a body interface with the main purpose of driving the interaction and stimulating specific actions. For these reasons, it was mainly used in the context of interactions where the children played with the robot or participated in play scenarios/sessions.
The children that participated in these studies and interacted with the Iromec robot were younger than 11 years old. This means that this particular robot, combined with interactions that focus on games or play scenarios, is more applicable to this age.
2.6. Alice Robot
Alice is a humanoid robot that looks like a young girl (Table 35). Alice was used in three studies [21][22][23] (2.94% of the examined publications) with children with ASD, during which it played a game with the children to improve their imitation and joint attention skills. During the interactions, the particular robot was controlled and teleoperated using a Microsoft Kinect and with Haptic PhantomOmni.
2.7. Probo Robot
Probo is a humanoid robot with a safe and huggable design. This robot was used only in studies [24][25][26] with children with ASD. Its appearance is that of a stuffed imaginary animal providing soft touch and acting as a social interface by employing social cues and communication modalities. In one case, it was used to improve the social skills of the children by participating with each child in a social story.
2.8. KiliRo Robot
KiliRo is a parrot robot, which was used only in studies [27][28] with children with ASD. In those studies, KiliRo was used to lower the stress levels of the children or to improve the interaction of the teacher with the child by essentially making the child more relaxed or by assisting them. This indicates that this kind of robot (zoomorphic), or at least the particular one, can be used as a relaxing tool for children. The usual interaction is a learning activity that aimed to improve the children’s learning abilities, as an assistance tool or as the main interaction media.
2.9. Zeno Robot
Zeno is a humanoid robot that resembles a small boy. This robot was used in two studies [29][30] as a social mediator and as an assistant in game scenarios with children with ASD. The main target of using this robot was to improve the eye contact, joint attention, symbolic play, and basic emotion recognition of the children.
2.10. Miscellaneous Robots
Aibo robot, which is a dog robot, was used in an explorative study [31] for children with ASD that aimed to check if the specific robot engaged the children more into the activities. The interactions were interactive sessions with the robot, during which the children played or interacted with the robot while the experimenter was watching them or asking some questions.
Rero is a humanoid social robot [32] used to establish a child–robot interaction based on five interaction modules designed for children with ASD. This robot is reconfigurable and can be programmed to execute various interaction scenarios. Its mobility along with the attractive appearance make this robot suitable to increase the engagement of the children during the interventions.
Cozmo is a very cute non-humanoid robot that has the form of a small truck (tTable 16). It is mainly used for children’s companion and entertainment since it can be programmed to dance, sneeze, or play several games. In the study [33], adults with multiple impairments interacted with Cozmo while playing games, with the robot analyzing the behavior of the participants.
Paro is a non-humanoid (pet-like) social robot with the appearance of a baby seal. This social robot was used as a therapeutic tool in [34][35] for children with multiple impairments, by improving the children’s cognitive skills through game/play sessions or free interactions.
MiRo is also a non-humanoid (pet-like) social robot, which has the form of a small dog. It is autonomous and is characterized by a brain-like control system. In [36], MiRo interacted with children with ASD, which helped them to reduce their anxiety and increased their compliance with game instructions.
CommU is a humanoid robot capable of initiating and maintaining conversations with ASD-impaired children [37]. It can move its head, eyes and body to reproduce human-like expressions during the conversation.
Astro was used in one study [38] with children with ASD for therapeutic purposes and was part of larger system architecture. Astro is a non-humanoid robot that was controlled by one researcher whilst another controlled its social behavior (speech and facial expressions) during the therapeutic sessions with the children. Moreover, a restricted-perception WoZ methodology was also applied. According to the researchers, this robot was used because it can socially interact with the children and is fully autonomous during therapy sessions.
The QTrobot was used in [39] that included children with ASD. This robot is a child-sized humanoid robot, with an expressive social appearance and a screen that allows the presentation of animated faces. QTrobot was used in the study as an interview partner to the child, during which it told a story, then asked some questions and lastly played an imitation game.
InMoov is a humanoid social robot designed [40] for interacting with ASD-impaired children. This is the first open-source 3D printed social robot [41], which anyone can print at home, subject to 3D printer availability. The main advantage of this robot is it is modular and adaptive nature, which permits it to be modified according to the needs of the study.
Ifbot is a non-humanoid robot able to communicate with humans verbally and non-verbally, with facial expression emotions. It is equipped with the appropriate hardware to execute computer vision algorithms such as object recognition, tracking, etc. In [42], Ifbot was used to promote collaborative learning between children with ADHD.
Keepon is a non-humanoid robot that was used [43] as a tool to give feedback to children with ASD during their learning tasks with the teachers. An operator gave the feedback of the robot manually.
FACE is an android that includes the FACET, which is a complete therapy infrastructure based on the integration of the HIPOP (Human Interaction Pervasive Observation Platform). This humanoid robot, which has the appearance of a female human, interacted with children with ASD in order to improve their social capabilities through psychologist-driven interactions. During the interactions, the robot was performing expressions with its face and then the children had to label and imitate them, and at a later stage, the children were free to play and observe the robot [44].
Kinetron is a humanoid robot that was used in a study with children with cerebral palsy [45]. In this study, the robot was used in the context of games that aimed to rehabilitate the children’s neurophysiology. KineTron was chosen because of its ability to perform precise movements with specified speed and force, providing feedback about position and tension and the ability to arrange complex movement patterns with the use of its special software RoboPlus.
Pleo is a socially expressive dinosaur robot that was designed to express emotions and attentions using body movement and vocalizations that are easily recognizable. It was used [46] to elicit social interaction and host of social perception reasoning to children with ASD, during a triadic interaction with the child and a teacher.
Queball is a robotic ball that is designed with the following feature categories: play, rough-and-tumble play, cognitive potential enhanced by movement and physical well-being. For these reasons, the robot was used in the study [47] as a therapeutic tool for children with ASD by engaging them in social interaction and physical, fun, learning and communication play.
Although Robovie R3 was used [48] in a part of the study, its humanoid characteristics made the children with hearing impairments better understand the signs it was showing, in comparison to the NAO robot that showed the same, during the sign language game they played. This was due to its 29 degrees of freedom and five independent fingers in its hands, combined with its expressive face.
SPELTRA (Speech and Language Therapy Robotic Assistant) was used [49] in speech exercises with children with multiple impairments. SPELTRA is a robotic system focused on providing support in speech therapy, with the main function of interacting with children through educational exercises and relational activities. It can also indirectly assist during the therapists in tasks.
Teo, a non-humanoid robot, was used [50] mainly to investigate its potential with children with ASD, Down syndrome, intellectual disabilities, Prader–Willi syndrome, psychosis and multiple disabilities. The children were left to play freely with the robot while the therapist was present.
Troy is a humanoid robot with only the upper torso, and has the size of an average four-year-old child. Troy was used [51] to examine the effects of its intervention on the challenging or tantrum behaviors of children with ASD, by letting it communicate with them.
In the following Table 1 and Table 2, the appearance of some popular social robots along with their main characteristics are presented, respectively.
Table 1. Appearance of some of the most popular social robots used in special education。
 |
 |
 |
 |
| Robot Name | Robot Type | Ref. | Impairments | Robot Role |
|---|---|---|---|---|
| Reference | Impairment | OutcomesInteraction | Challenges | |
| NAO | Kaspar | Lego-Mindstorms-ev3 | iRobiQ | |
 |
 |
 |
 |
|
| Iromec | Alice | Probo | KiliRo | |
 |
 |
 |
 |
|
| Zeno | Aibo | Rero | Cozmo | |
 |
 |
 |
 |
|
| Paro | MiRo | CommU | QTrobot | |
 |
 |
 |
 |
|
| InMoov | Ifbot | Charlie | Keepon |
Table 2. Main characteristics of the commonly used social robots.
| NAO | Humanoid | [52][53][54][55][56][36][57][58][59][60][61][62][63][64][65][66][48][67][68][22][24][35][69][70][71][72][73][74][75][76][77][78][79][80][81][82][83][84][85] | ASD, multiple impairments, cerebral palsy, hearing impairments, oncological disorders | Proactive companion, assistive intervention tool, social mediator, therapeutic assistant | Imitation, therapeutic games, free play sessions, teaching joint attention, learning sessions | |||||
| [25] | Kaspar | Humanoid][88][89][90][91] | ASD, multiple impairments, Down syndrome | Game partner | Unconstrained interaction, tactile interaction through tactile play scenarios, games | |||||
| ASD | Sessions positively affected their walking, speaking and handwriting; autism severity and parental stress decreased, social skills increased and stereotyped behaviors improved. | A small number of participants and no control group, children were not mature enough, potential effects of other classes, heterogeneous autism severity on children, unpredicted behaviors during sessions, engineering and technical issues, the small number of sessions. | ||||||||
| [34] | [ | ASD86][87 | The use of the NAO robot showed significant improvement in several aspects of learning behaviors, confirming the confidence level for the techniques used. | Not reported. | Lego Mindstorms | Non-Humanoid Humanoid |
35][92][93][94][95][95] | Multiple impairments, cerebral palsy | Main interaction | Working sessions, workshops (program robot to solve problems), games |
| ASD | Reduction in anxiety and increase in compliance with instructions. | Not reported. | iRobiQ | Humanoid | [20][96][97][98] | ASD, multiple impairments | Main interaction | Story intervention, social interaction | ||
| [36] | ASD | Distrust task: the independent-sample Welch t-test showed a significant difference in overall distrust performance between the ASD (M = 7.70, SD = 2.62) and TD groups (M = 9.35, SD = 0.67. TD children were more likely than children with ASD to distrust the robot who offered incorrect information. Deception task: the overall performance analysis of the deception task also found a significant difference in the overall deception performance between the ASD (M = 6.70, SD = 3.64) and TD (M = 9.55, SD = 1.19) groups, indicating that TD children were more likely to deceive the robot than children with ASD. |
Did not use a within-subject design to compare the same participants with human and robot conditions. Although there is no significant difference in the mean ages between the two ASD groups, the age difference of six months could still represent different neurodevelopmental patterns in children, which could affect their interactions with robots and humans. The anthropomorphic thinking for the human condition was not investigated; thus, it is not clear whether the interaction progress would affect children’s anthropomorphic thinking answers. To study the regional difference of the performance of this study, and to replicate these findings in more cities and counties. |
Iromec | Non-Humanoid | [99][100][87][88 | ||||
| [37] | ][ | Multiple disabilities101] | The results obtained show that children can adapt quickly to the robot, and in the case of phonemic area, an immediate improvement. ASD, multiple impairments, Down syndrome |
Helped to address the educational, cognitive, physical and social needs of the children, engaging youth with disabilities in a robotics program. | Three main improvements were identified for this study, based on its challenges: (1) to scale the research and to repeat it in more sites, (2) to increase the number of female children and (3) to generalize the designed experiments to children with other disabilities, since the authors realized that STEM learning for children with various disabilities may have different meanings and is an area worthy of further exploration.Companion and teacher assistant | Play scenarios, triadic interaction, imitation | ||||
| Alice | Humanoid | |||||||||
| [39] | [ | Multiple disabilities21][22][23] | ASD | Game partner | Game, triadic interaction | |||||
| Children were engaged in the activity from the very beginning of the session. | The appearance and behaviors did not evoke an agent with its inner state and intentionality. Issues are mainly related to the functional aspect of the visual interface, design of the physical appearance of the robot and its faces. | Probo | Humanoid (pet-like) |
[24] | ||||||
| [40] | [25 | Multiple disabilities][26] | ASD | Main interaction | Storytelling, game | |||||
| Helped to address the educational, cognitive, physical and social needs of the children. | The research was conducted at only one site. The girls were under-represented in the program. | KiliRo | Non-Humanoid (pet-like) |
[27 | ||||||
| [41] | ] | |||||||||
| [42] | Multiple disabilities | The Wilcoxon signed-rank test showed that for the group as a whole, ratings were significantly higher when working with the robot. | There was a small amount of bias that may have influenced the teachers’ ratings. There were more people present in the classroom than when working with the robot and there was also the researcher and a camera. | |||||||
| [43] | Multiple disabilities | No positive changes for the Sensory developmental area were recorded. The motor developmental area was the only one that did not report any negative changes. | To extend this preliminary study. | |||||||
| [44] | Multiple disabilities | Some children had the highest increase on the variable “communication with Teo”, while others had a high decrease. For four children, there was an increase in some variables, while there was a strong decrease in two children. The variable “manipulation of Teo” had a decrease for all children except for two of them. Additionally, the variables “externalization of needs”, “positive emotions” and “negative emotions” showed a positive trend in the second session in both groups of children. | Causality relationships are hard to measure. | |||||||
| [45] | Multiple disabilities | Improvements in distinguishing the cards and overall behavior. | Not reported. | |||||||
| [46] | Multiple disabilities | The mean score of IPPA before the sessions was 11.8, and the mean score after the sessions was 8.8. | Not reported. | |||||||
| [47] | Multiple disabilities | Analysis of the data from the pre- and post-test questionnaires; all items were compared with each other in order to evaluate possible improvements in the developmental target areas. | The ability to speak and understand the language was vital for the children. Study data are preliminary. | |||||||
| [48] | ASD | Interview partner | Storytelling, ask questions, imitation games | |||||||
| InMoov | Humanoid | [40] | ASD | Teacher assistant | Sign language learning | |||||
| Ifbot | Non-Humanoid | [42] | ADHD | Collaborative learning | Wizard of Oz, main interaction | |||||
| Non-humanoid | [ | 50] | ||||||||
| [Multiple disabilities | [28] | ASD | Lower stress levels of the children, improve the interaction of the teacher | Pronouncing letters and dancing, free interaction, learning activities | ||||||
| Zeno | Humanoid | [29][30] | ASD | Social mediator, assistant | recognize emotions in a game scenario, stimulus-reinforcement | |||||
| Aibo | Non-Humanoid (pet-like) |
[31] | ASD | Main interaction | Interactive and therapy sessions | |||||
| Rero | Humanoid | [32] | ASD | Main interaction | Interaction modules | |||||
| Cozmo | Non-Humanoid | [33] | Multiple impairments | Main interaction | Games | |||||
| Multiple disabilities | The three students became more confident and willing to engage in conversation after interacting with the robot over a period of time. | Not reported. | ||||||||
| [49] | Multiple disabilities | They confirmed the lasting positive change by gross observation. | One boy did not like the big eyes or the slight drive noise. | |||||||
| [50] | Multiple disabilities | All groups in this experiment improved their knowledge and skills between the pre-test and the post-test. The interaction with the robot was more efficient in improving functional knowledge and skills. Students’ IQ levels showed an improvement. | Not reported. | |||||||
| [51] | Multiple disabilities | Children successful at the end of the therapy. Two children with profound ID did not benefit from robot-assisted therapy. All children increased the time spent imitating the robot. | The results of this study only indicate the underlying potential of research in this field. | |||||||
| [56] | Cerebral palsy | All children liked the sessions with the Rehabilitation Robot. The children wanted him to be present during their other sessions. | Not reported. | Keepon | Non-humanoid (pet-like) |
[43] | ASD | Gives feedback to the children | Learning/reversal learning task | |
| FACE | Humanoid (Android) |
[44] | ASD | Treatment assistive tool | Imitation games | |||||
| Kinetron | Humanoid | [45] | Cerebral palsy | Rehabilitation, precise movements with specified speed and force. | Games | |||||
| Pleo | Non-humanoid (pet-like) |
[46] | ASD | Elicit social interaction and host of social perception reasoning to children | Triadic interaction with the child and a teacher | Multiple impairments, Down syndrome | Main interaction | Free play | ||
| “No response” count decreases and flattens out with improvement. The “correct response” count consistently increases. These counts are consistent with the increase of total directives over time. The results for subject 3 are inconclusive. Another subject made considerable progress according to the SLP and SPED teacher. | Not reported. | Paro | Non-Humanoid (pet-like) |
[34][35] | Multiple impairments | Main interaction | Free interaction | |||
| MiRo | Non-Humanoid (pet-like) |
[36] | ASD | Main interaction | Mixed play activities | |||||
| CommU | Humanoid | [37] | ASD | Main interaction | Conversations | |||||
| Astro | Non-Humanoid | [38] | ASD | Main interaction | Therapy sessions | |||||
| QTrobot | Humanoid | [39] | ||||||||
| [57] | Cerebral palsy | The robot misinterprets children with the speech impediment. | Not reported. | Queball | ||||||
| [59] | Cerebral palsy | Scoring based on Rasch analysis. During intervention, all children had an increase in self-control, specifically the items decides, modifies, initiates and transitions. | The Lego Invention robot is not 100% accurate in its movements. | |||||||
| [60] | ADHD | Learning time (min:sec): without robot: 15:28, 12:49; with robot: 18:05, 13:45. Running time: without robot: 6 and 5 times; with robot: 7 and 9 times. |
Not reported. | Non-humanoid | [47] | |||||
| [62] | Hearing impairments | The children of beginner’s level preferred to play with NAO first. Their average error rates are smaller in the games played with R3 than NAO in the first games, and total error in both games. | The robots, due to their hands, did not correctly sign one of the words. | ASD | Therapeutic tool | Social interaction, play | ||||
| [64] | Down syndrome | Participants had a higher percentage of engagement with the Lego Mindstorm than with the NAO. In the fourth participant, there was no difference in percentage engagement between the two robots. In terms of percentage errors, there was no difference between the two robots in all four participants. | The learning objectives were limited to those that could be carried out with both robots. | Robovie R3 | Humanoid | [48] | Hearing impairments | Teacher assistant | Sign language learning | |
| SPELTRA | ||||||||||
| [65] | Down syndrome | The child was more interactive with the experimenter and the robot during the sessions with the Kaspar robot. | Not reported. | Non-humanoid | [49] | Multiple impairments | Main interaction | Speech exercises | ||
| [68] | Oncological disorders | The motivation was assessed using three measures based on the Fun Toolkit. | Not reported. | Teo | Troy | Humanoid | [51] | ASD | Treatment assistive tool | Social communication |
Table 3. Main reported outcomes and challenges of some of the examined studies.
3. Discussion
3. Discussion
In the previous sections, the research attempts for the integration of social robots in the special education of children in the period 2008 to 2020 were recorded and presented in detail. The purpose of this analysis is to investigate the answers to the four questions that were initially posed as the main objectives of this systematic review.
In particular, the statistical analysis of papers published both chronologically and geographically indicates a growing research interest of the scientific community to apply social robots in the education of children and adults with impairments. Figure 13 shows Europe leading the effort to integrate social robots into special education, followed by the U.S.A. The need for the inclusion of these individuals into modern societies as equal members of them requires the acceleration of this integration world-wide. It seems that the rapid development of technology and artificial intelligence can help in this direction, through the development of more and more autonomous and intelligent social robots (tTable 16).
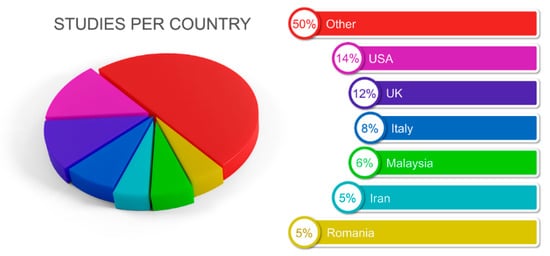
Figure 1. Percentage of studies per country.
In addition, another evidence that proves the high degree of integration of social robots in special education is the wide variety of impairments (
In addition, another evidence that proves the high degree of integration of social robots in special education is the wide variety of impairments (
Figure 2) of children who participated in interaction sessions with social robots. Although most of the publications are about groups of people with ASD, which was to be expected, the variety of different impairments that have been the subject of a study of the application of social robots is surprising. In all these cases, and although most studies have yielded encouraging results, it is a common finding that this road is very long.
6) of children who participated in interaction sessions with social robots. Although most of the publications are about groups of people with ASD, which was to be expected, the variety of different impairments that have been the subject of a study of the application of social robots is surprising. In all these cases, and although most studies have yielded encouraging results, it is a common finding that this road is very long.
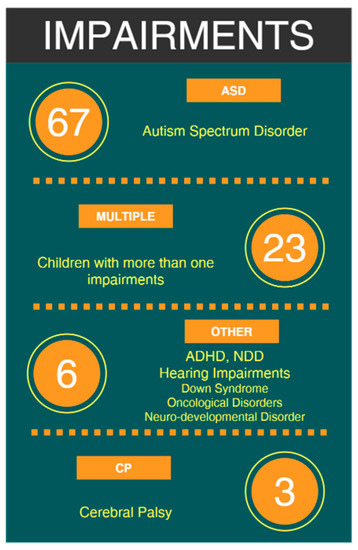
Figure 2. Number of applications of robots on different kind of impairments
Regarding the third question to be investigated, about the suitability of social robots in specific impairments, based on the analysis that was carried out, it appears that specific characteristics of robots are very useful for specific impairments. For example, the NAO robot, which is the most equipped robot of all, is preferred for educating children with ASD, which are cases that are more complex. In addition, in children with hearing problems, robots with five fingers are suggested for the teaching of sign language, e.g., Robovie R3, or InMoov. Apart from the type of impairment, another factor that determines the suitability of a robot is the age of the children involved. Thus, for young children, pet-like robots (Parot, Aibo, Pleo, etc.) prove to be more suitable due to their more playful appearance. However, a targeted study is required to identify the desired technical characteristics of the robots for each impairment, in order to select the most suitable robot in each case. It is worth mentioning that most robots on the market have been developed mainly for the education, entertainment and companionship of the children of typical education who are the largest population and not for the children of special education. Therefore, the design of robots aimed at children in special education is an unexplored field, in the direction of which more efforts are expected in the near future.
As far as the intelligence level of the social robots involving in special education is concerned, it is deduced that it does not differ from that of the typical education. Usually, the scientists follow the path taken by the pioneer Marvin Minsky [102], based on which several small and less intelligent parts build intelligence. In this context, face detection, face recognition, speech recognition, emotional recognition, visual behavioral analysis, visual tracking, etc. algorithms [103] are used to build intelligence in social robots that enable them to interact with children more naturally. However, it is worth mentioning that the needs for intelligent interaction of the robot with children in special education are particularly high, due to the particular behavior of children, e.g., in the expression of emotions. Therefore, the design of intelligent algorithms and/or the adaptation of existing algorithms to the specifics of each category of impairments is considered of paramount importance.
Although all the research papers studied in this work have reached positive conclusions about the use of social robots, in most cases, the authors have reported the challenges (Table 35) that need to be addressed in the future, because of the weaknesses of their methodologies. In conclusion, one could say that the biggest challenge that researchers have to deal with is conducting a large-scale study of the effect of social robots on special education, with large groups of children. It is worth mentioning that out of the total number of publications, the number of participants was 11.29 on average, while only six studies involved more than 20 children, with the study in [104] showing the highest number of participants equal to 74. At the same time, there is reduced participation in the researches of females, since, on average, 2.69 females participate in the sessions compared to 8.5 males, while in 10% of cases no girls participated at all. The small number of participants in combination with the lack of a control group are often factors that reduce the statistical accuracy of the studies and the reliability of their results. In addition, due attention has not yet been paid to the long-term effect of social robots on special education, through follow-up sessions, to study the maturation factor of the effects that children have on their interaction with social robots.
Finally, another area of significant challenges is the study of the intervention methodologies proposed in the various works. In this field, there is an inconsistency between the methodologies for developing intervention scenarios, resulting in not very convincing conclusions. Future work should be directed to compare the proposed intervention methods and interaction scenarios so that the conclusions drawn are more reliable.
4. Conclusions
In this work, the research activity of the period 2008 to 2020 regarding the application of social robots in special education was presented systematically. The study focused on four distinct directions: (1) the investigation of the degree of integration of social robots in the training of special education individuals, (2) the assessment of the scope of application of social robots in different impairments, (3) the search for different types of social robots and their appropriateness by category of impairments and (4) the emergence of challenges that need to be addressed in order for social robots to make a significant contribution to the social integration of people with impairments.
The present study quantified the satisfactory degree of integration of social robots in special education as well as the wide range of applications of social robots in a variety of impairments. A large number of different social robots used in special education were also identified, but it was found that most of them were not designed for the specific needs of special education individuals. The challenges highlighted through this study are mainly focused on the small size of the groups of children participating in the sessions, the low participation rate of girls, the lack of control group and follow up sessions, and the finding that the design of intervention scenarios should be executed with clear objectives so that the interpretation of the results leads to safe conclusions. This set of challenges should be the subject of future research in this field, towards the use of existing knowledge for the more effective integration of social robots in special education.
References
- Lasi, H.; Fettke, P.; Kemper, H.-G.; Feld, T.; Hoffmann, M. Industry 4.0. Bus. Inf. Syst. Eng. 2014, 6, 239–242.
- Fukuyama, M. Society 5.0: Aiming for a new human-centered society. Jpn. Spotlight 2018, 27, 47–50.
- Breazeal, C. Toward sociable robots. Robot. Autonom. Syst. 2003, 42, 167–175.
- Lin, C.-Y.; Cheng, L.-C.; Huang, C.-C.; Chuang, L.-W.; Teng, W.-C.; Kuo, C.-H.; Gu, H.-Y.; Chung, K.-L.; Fahn, C.-S. Versatile humanoid robots for theatrical performances. Int. J. Adv. Robot. Syst. 2013, 10, 7.
- Katevas, K.; Healey, P.G.; Harris, M.T. Robot comedy lab: Experimenting with the social dynamics of live performance. Front. Psychol. 2015, 6, 1253.
- Lytridis, C.; Bazinas, C.; Kaburlasos, V.G.; Vassileva-Aleksandrova, V.; Youssfi, M.; Mestari, M.; Ferelis, V.; Jaki, A. Social robots as cyber-physical actors in entertainment and education. In Proceedings of the 2019 International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 19–21 September 2019; pp. 1–6.
- Fazekas, G.; Horvath, M.; Toth, A. A novel robot training system designed to supplement upper limb physiotherapy of patients with spastic hemiparesis. Int. J. Rehab. Res. 2006, 29, 251–254.
- Kachouie, R.; Sedighadeli, S.; Khosla, R.; Chu, M.-T. Socially assistive robots in elderly care: A mixed-method systematic literature review. Int. J. Hum. Comput. Interact. 2014, 30, 369–393.
- Savela, N.; Turja, T.; Oksanen, A. Social acceptance of robots in different occupational fields: A systematic literature review. Int. J. Soc. Robot. 2018, 10, 493–502.
- Lytridis, C.; Bazinas, C.; Sidiropoulos, G.; Papakostas, G.A.; Kaburlasos, V.G.; Nikopoulou, V.-A.; Holeva, V.; Evangeliou, A. Distance special education delivery by social robots. Electronics 2020, 9, 1034.
- Belpaeme, T.; Kennedy, J.; Ramachandran, A.; Scassellati, B.; Tanaka, F. Social robots for education: A review. Sci. Robot. 2018, 3, eaat5954.
- Kostova, S.; Dimitrova, M.; Kaburlasos, V.; Vrochidou, E.; Papakostas, G.; Pachidis, T.; Saeva, S.; Bonković, M.; Kružić, S.; Marasović, T.; et al. Identifying needs of robotic and technological solutions for the classroom. In Proceedings of the 2018 26th International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 13–15 September 2018; pp. 1–6.
- Musić, J.; Bonković, M.; Kružić, S.; Marasović, T.; Papić, V.; Kostova, S.; Dimitrova, M.; Saeva, S.; Zamfirov, M.; Kaburlasos, V.; et al. Robotics and information technologies in education: Four countries from Alpe-Adria-Danube region survey. Int. J. Technol. Des. Educ. 2020.
- Lytridis, C.; Bazinas, C.; Papakostas, G.A.; Kaburlasos, V. On measuring engagement level during child-robot interaction in education. In Proceedings of the Robotics in Education, Online. 30 September–3 October 2020.
- Sidiropoulos, G.K.; Papakostas, G.A.; Lytridis, C.; Bazinas, C.; Kaburlasos, V.G.; Kourampa, E.; Karageorgiou, E. Measuring engagement level in child-robot interaction using machine learning based data analysis. In Proceedings of the 2020 International Conference on Data Analytics for Business and Industry: Way Towards a Sustainable Economy (ICDABI), Online. 26–27 October 2020; pp. 1–5.
- Sano, A.; Hernandez, J.; Deprey, J.; Eckhardt, M.; Goodwin, M.S.; Picard, R.W. Multimodal annotation tool for challenging behaviors in people with autism spectrum disorders. In Proceedings of the ACM Conference on Ubiquitous Computing; Association for Computing Machinery, New York, NY, USA, 21–26 September 2012; pp. 737–740.
- Dong, W.; Lepri, B.; Cappelletti, A.; Pentland, A.S.; Pianesi, F.; Zancanaro, M. Using the influence model to recognize functional roles in meetings. In Proceedings of the 9th international Conference on Multimodal Interfaces—Association for Computing Machinery, New York, NY, USA, 9–13 November 2007; pp. 271–278.
- Belpaeme, T.; Vogt, P.; Van den Berghe, R.; Bergmann, K.; Göksun, T.; De Haas, M.; Kanero, J.; Kennedy, J.; Küntay, A.C.; Oudgenoeg-Paz, O. Guidelines for designing social robots as second language tutors. Int. J. Soc. Robot. 2018, 10, 325–341.
- Papakostas, G.A.; Strolis, A.K.; Panagiotopoulos, F.; Aitsidis, C.N. Social robot selection: A case study in education. In Proceedings of the 26th International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Supetar, Croatia, 13–15 September 2018; pp. 1–4.
- Jordan, K.; King, M.; Hellersteth, S.; Wirén, A.; Mulligan, H. Feasibility of using a humanoid robot for enhancing attention and social skills in adolescents with autism spectrum disorder. Int. J. Rehab. Res. 2013, 36, 221–227.
- Taheri, A.R.; Alemi, M.; Meghdari, A.; Pour Etemad, H.R.; Basiri, N.M. Social robots as assistants for autism therapy in Iran: Research in progress. In Proceedings of the Second RSI/ISM International Conference on Robotics and Mechatronics (ICRoM), Tehran, Iran, 15–17 October 2014; pp. 760–766.
- Taheri, A.; Meghdari, A.; Alemi, M.; Pouretemad, H. Human-robot interaction in autism treatment: A case study on three pairs of autistic children as twins, siblings, and classmates. Int. J. Soc. Robot. 2018, 10, 93–113.
- Ghorbandaei Pour, A.; Taheri, A.; Alemi, M.; Meghdari, A. Human-robot facial expression reciprocal interaction platform: Case studies on children with autism. Int. J. Soc. Robot. 2018, 10, 179–198.
- Pop, C.A.; Simut, R.; Pintea, S.; Saldien, J.; Rusu, A.; David, D.; Vanderfaeillie, J.; Lefeber, D.; Vanderborght, B. Can the social robot probo help children with autism to identify situation-based emotions? A series of single case experiments. Int. J. Hum. Robot. 2013, 10, 1350025.
- Simut, R.E.; Vanderfaeillie, J.; Peca, A.; Van de Perre, G.; Vanderborght, B. Children with autism spectrum disorders make a fruit salad with probo, the social robot: An interaction study. J. Autism Dev. Disord. 2016, 46, 113–126.
- Vanderborght, B.; Simut, R.; Saldien, J.; Pop, C.; Rusu, A.S.; Pintea, S.; Lefeber, D.; David, D.O. Using the social robot probo as a social story telling agent for children with ASD. Interact. Stud. 2012, 13, 348–372.
- Bharatharaj, J.; Huang, L.; Al-Jumaily, A.; Elara, M.R.; Krägeloh, C. Investigating the effects of robot-assisted therapy among children with autism spectrum disorder using bio-markers. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Busan, Korea, 25–27 August 2017; Volume 234, pp. 1–7.
- Bharatharaj, J.; Huang, L.; Krägeloh, C.; Elara, M.R.; Al-Jumaily, A. Social engagement of children with autism spectrum disorder in interaction with a parrot-inspired therapeutic robot. Procedia Comput. Sci. 2018, 133, 368–376.
- Palestra, G.; Varni, G.; Chetouani, M.; Esposito, F. A multimodal and multilevel system for robotics treatment of autism in children. In Proceedings of the International Workshop on Social Learning and Multimodal Interaction for Designing Artificial Agents—DAA ’16; ACM Press: Tokyo, Japan, 2016; pp. 1–6.
- Silva, V.; Soares, F.; Esteves, J.S.; Pereira, A.P. Building a hybrid approach for a game scenario using a tangible interface in human robot interaction. In Serious Games; Göbel, S., Garcia-Agundez, A., Tregel, T., Ma, M., Baalsrud Hauge, J., Oliveira, M., Marsh, T., Caserman, P., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2018; Volume 11243, pp. 241–247. ISBN 978-3-030-02761-2.
- Stanton, C.M.; Kahn, P.H.; Severson, R.L.; Ruckert, J.H.; Gill, B.T. Robotic animals might aid in the social development of children with autism. In Proceedings of the 3rd ACM/IEEE International Conference on Human-Robot Interaction (HRI); ACM Press: New York, NY, USA, 2008; pp. 271–278.
- Ishak, N.I.; Yusof, H.M.; Ramlee, M.R.H.; Sidek, S.N.; Rusli, N. Modules of interaction for ASD children using rero robot (Humanoid). In Proceedings of the 2019 7th International Conference on Mechatronics Engineering (ICOM), Putrajaya, Malaysia, 30–31 October 2019; pp. 1–6.
- Balasuriya, S.S.; Sitbon, L.; Brereton, M.; Koplick, S. How can social robots spark collaboration and engagement among people with intellectual disability? In Proceedings of the 31st Australian Conference on Human-Computer-Interaction, Fremantle, WA, Australia, 2–5 December 2019; pp. 209–220.
- Nakadoi, Y. Usefulness of animal type robot assisted therapy for autism spectrum disorder in the child and adolescent psychiatric ward. In Proceedings of the JSAI International Symposium on Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2015; pp. 478–482.
- Alhaddad, A.Y.; Javed, H.; Connor, O.; Banire, B.; Al Thani, D.; Cabibihan, J.-J. Robotic trains as an educational and therapeutic tool for autism spectrum disorder intervention. In Robotics in Education; Lepuschitz, W., Merdan, M., Koppensteiner, G., Balogh, R., Obdržálek, D., Eds.; Advances in Intelligent Systems and Computing; Springer International Publishing: Cham, Switzeralnd, 2019; Volume 829, pp. 249–262. ISBN 978-3-319-97084-4.
- Di Nuovo, A.; Bamforth, J.; Conti, D.; Sage, K.; Ibbotson, R.; Clegg, J.; Westaway, A.; Arnold, K. An explorative study on robotics for supporting children with autism spectrum disorder during clinical procedures. In Proceedings of the Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 189–191.
- Shimaya, J.; Yoshikawa, Y.; Kumazaki, H.; Matsumoto, Y.; Miyao, M.; Ishiguro, H. Communication support via a tele-operated robot for easier talking: Case/laboratory study of individuals with/without autism spectrum disorder. Int. J. Soc. Robot. 2019, 11, 171–184.
- Melo, F.S.; Sardinha, A.; Belo, D.; Couto, M.; Faria, M.; Farias, A.; Gamboa, H.; Jesus, C.; Kinarullathil, M.; Lima, P. Project INSIDE: Towards autonomous semi-unstructured human-robot social interaction in autism therapy. Artif. Intell. Med. 2019, 96, 198–216.
- Costa, A.P.; Charpiot, L.; Lera, F.R.; Ziafati, P.; Nazarikhorram, A.; Van Der Torre, L.; Steffgen, G. More attention and less repetitive and stereotyped behaviors using a robot with children with autism. In Proceedings of the 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Nanjing, China, 27–31 August 2018; pp. 534–539.
- Axelsson, M.; Racca, M.; Weir, D.; Kyrki, V. A participatory design process of a robotic tutor of assistive sign language for children with autism. In Proceedings of the 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), New Delhi, India, 14–18 October 2019; pp. 1–8.
- InMoov—Open-Source 3D Printed Life-Size Robot. Available online: (accessed on 28 April 2021).
- Jimenez, F.; Yoshikawa, T.; Furuhashi, T.; Kanoh, M.; Nakamura, T. Effects of collaborative learning between educational-support robots and children who potential symptoms of a development disability. In Proceedings of the 2016 Joint 8th International Conference on Soft Computing and Intelligent Systems (SCIS) and 17th International Symposium on Advanced Intelligent Systems (ISIS), Sapporo, Japan, 25–28 August 2016; pp. 266–270.
- Costescu, C.A.; Vanderborght, B.; David, D.O. Reversal learning task in children with autism spectrum disorder: A robot-based approach. J. Autism Dev. Disord. 2015, 45, 3715–3725.
- Mazzei, D.; Greco, A.; Lazzeri, N.; Zaraki, A.; Lanatà, A.; Igliozzi, R.; Mancini, A.; Stoppa, F.; Scilingo, E.P.; Muratori, F. Robotic social therapy on children with autism: Preliminary evaluation through multi-parametric analysis. In Proceedings of the International Conference on Privacy, Security, Risk and Trust and 2012 International Confernece on Social Computing, Amsterdam, The Netherlands, 3–5 September 2012; pp. 766–771.
- Kozyavkin, V.; Kachmar, O.; Ablikova, I. Humanoid social robots in the rehabilitation of children with cerebral palsy. In Proceedings of the 8th International Conference on Pervasive Computing Technologies for Healthcare, Oldenburg, Germany, 20–23 May 2014; pp. 430–431.
- Kim, E.S.; Berkovits, L.D.; Bernier, E.P.; Leyzberg, D.; Shic, F.; Paul, R.; Scassellati, B. Social robots as embedded reinforcers of social behavior in children with autism. J. Autism Dev. Disord. 2013, 43, 1038–1049.
- Salter, T.; Davey, N.; Michaud, F. Designing & developing QueBall, a robotic device for autism therapy. In Proceedings of the 23rd IEEE International Symposium on Robot and Human Interactive Communication, Edinburgh, UK, 25–29 September 2014; pp. 574–579.
- Özkul, A.; Köse, H.; Yorganci, R.; Ince, G. Robostar: An interaction game with humanoid robots for learning sign language. In Proceedings of the 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014), Bali, Indonesia, 5–10 December 2014; pp. 522–527.
- Robles-Bykbaev, V.; Ochoa-Guaraca, M.; Carpio-Moreta, M.; Pulla-Sánchez, D.; Serpa-Andrade, L.; López-Nores, M.; García-Duque, J. Robotic assistant for support in speech therapy for children with cerebral palsy. In Proceedings of the 2016 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Zihuatanejo, Mexico, 9–11 November 2016; pp. 1–6.
- Bonarini, A.; Clasadonte, F.; Garzotto, F.; Gelsomini, M.; Romero, M. Playful interaction with Teo, a mobile robot for children with neurodevelopmental disorders. In Proceedings of the 7th International Conference on Software Development and Technologies for Enhancing Accessibility and Fighting Info-Exclusion—Association for Computing Machinery, Vila Real, Portugal, 1–3 December 2016; pp. 223–231.
- Whitmer, T. Incorporating a Robot in Intervention with Children with ASD: The Effect on Tantrum Behaviors. Master’s Thesis, Brigham Young University, Provo, UT, USA, 2015.
- Taheri, A.; Meghdari, A.; Alemi, M.; Pouretemad, H. Teaching music to children with autism: A social robotics challenge. Sci. Iran. 2019, 26, 40–58.
- Cao, H.-L.; Esteban, P.G.; Bartlett, M.; Baxter, P.; Belpaeme, T.; Billing, E.; Cai, H.; Coeckelbergh, M.; Costescu, C.; David, D.; et al. Robot-enhanced therapy: Development and validation of supervised autonomous robotic system for autism spectrum disorders therapy. IEEE Robot. Automat. Mag. 2019, 26, 49–58.
- Ali, S.; Mehmood, F.; Dancey, D.; Ayaz, Y.; Khan, M.J.; Naseer, N.; Amadeu, R.D.C.; Sadia, H.; Nawaz, R. An adaptive multi-robot therapy for improving joint attention and imitation of ASD children. IEEE Access 2019, 7, 81808–81825.
- Ali, S.; Mehmood, F.; Ayaz, Y.; Asgher, U.; Khan, M.J. Effect of different visual stimuli on joint attention of ASD children using NAO robot. In Proceedings of the Advances in Neuroergonomics and Cognitive Engineering, Washington, DC, USA, 24–28 July 2019; Volume 953, pp. 490–499, ISBN 978-3-030-20472-3.
- Qidwai, U.; Kashem, S.B.A.; Conor, O. Humanoid robot as a teacher’s assistant: Helping children with autism to learn social and academic skills. J. Intell. Robot. Syst. 2020, 98, 759–770.
- Zhang, Y.; Song, W.; Tan, Z.; Zhu, H.; Wang, Y.; Lam, C.M.; Weng, Y.; Hoi, S.P.; Lu, H.; Man Chan, B.S.; et al. Could social robots facilitate children with autism spectrum disorders in learning distrust and deception? Comput. Hum. Behav. 2019, 98, 140–149.
- Lewis, L.; Charron, N.; Clamp, C.; Craig, M. Co-robot therapy to foster social skills in special need learners: Three pilot studies. In Methodologies and Intelligent Systems for Technology Enhanced Learning; Springer: Berlin/Heidelberg, Germany, 2016; pp. 131–139.
- Hedgecock, J.; Standen, P.J.; Beer, C.; Brown, D.; Stewart, D.S. Evaluating the role of a humanoid robot to support learning in children with profound and multiple disabilities. J. Assist. Technol. 2014, 8, 111–123.
- Van den Heuvel, R.J.; Lexis, M.A.; de Witte, L.P. Robot ZORA in rehabilitation and special education for children with severe Physical disabilities: A pilot study. Int. J. Rehab. Res. 2017, 40, 353.
- Silvera-Tawil, D.; Bradford, D.; Roberts-Yates, C. Talk to me: The role of human-robot interaction in improving verbal communication skills in students with autism or intellectual disability. In Proceedings of the 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2018; pp. 1–6.
- Park, E.; Kwon, S.J. I can teach them: The ability of robot instructors to cognitive disabled children. J. Psychol. Educ. Res. 2016, 24, 101–114.
- Conti, D.; Trubia, G.; Buono, S.; Di Nuovo, S.; Di Nuovo, A. Evaluation of a robot-assisted therapy for children with autism and intellectual disability. In Proceedings of the Annual Conference Towards Autonomous Robotic Systems; Springer: Berlin/Heidelberg, Germany, 2018; pp. 405–415.
- Zhanatkyzy, A.; Telisheva, Z.; Turarova, A.; Zhexenova, Z.; Sandygulova, A. Quantitative results of robot-assisted therapy for children with autism, ADHD and delayed speech development. In Proceedings of the Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 541–542.
- Rakhymbayeva, N.; Seitkazina, N.; Turabayev, D.; Pak, A.; Sandygulova, A. A long-term study of robot-assisted therapy for children with severe autism and ADHD. In Proceedings of the Companion of the 2020 ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 401–402.
- Rahman, R.A.A.; Hanapiah, F.A.; Basri, H.H.; Malik, N.A.; Yussof, H. Use of humanoid robot in children with cerebral palsy: The ups and downs in clinical experience. Procedia Comput. Sci. 2015, 76, 394–399.
- Aslam, S.; Standen, P.J.; Shopland, N.; Burton, A.; Brown, D. A comparison of humanoid and non-humanoid robots in supporting the learning of pupils with severe intellectual disabilities. In Proceedings of the 2016 International Conference on Interactive Technologies and Games (ITAG), Notthingham, UK, 26–27 October 2016; pp. 7–12.
- Meyns, P.; van der Spank, J.; Capiau, H.; De Cock, L.; Van Steirteghem, E.; Van der Looven, R.; Van Waelvelde, H. Do a humanoid robot and music increase the motivation to perform physical activity? A quasi-experimental cohort in typical developing children and preliminary findings in hospitalized children in neutropenia. Int. J. Hum. Comput. Stud. 2019, 122, 90–102.
- Srinivasan, S.M.; Kaur, M.; Park, I.K.; Gifford, T.D.; Marsh, K.L.; Bhat, A.N. The effects of rhythm and robotic interventions on the imitation/praxis, interpersonal synchrony, and motor performance of children with autism spectrum disorder (ASD): A pilot randomized controlled trial. Autism Res. Treat. 2015, 2015, 1–18.
- So, W.-C.; Wong, M.K.-Y.; Lam, C.K.-Y.; Lam, W.-Y.; Chui, A.T.-F.; Lee, T.-L.; Ng, H.-M.; Chan, C.-H.; Fok, D.C.-W. Using a social robot to teach gestural recognition and production in children with autism spectrum disorders. Disabil. Rehab. Assist. Technol. 2018, 13, 527–539.
- Hirokawa, M.; Funahashi, A.; Itoh, Y.; Suzuki, K. Adaptive behavior acquisition of a robot based on affective feedback and improvised teleoperation. IEEE Trans. Cogn. Dev. Syst. 2019, 11, 405–413.
- Mavadati, S.M.; Feng, H.; Salvador, M.; Silver, S.; Gutierrez, A.; Mahoor, M.H. Robot-based therapeutic protocol for training children with autism. In Proceedings of the 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 855–860.
- Nie, G.; Zheng, Z.; Johnson, J.; Swanson, A.R.; Weitlauf, A.S.; Warren, Z.E.; Sarkar, N. Predicting response to joint attention performance in human-human interaction based on human-robot interaction for young children with autism spectrum disorder. In Proceedings of the 27th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Nanjing, China, 31 August–4 September 2018; pp. 1–4.
- Shamsuddin, S.; Yussof, H.; Ismail, L.I.; Mohamed, S.; Hanapiah, F.A.; Zahari, N.I. Initial response in HRI—A case study on evaluation of child with autism spectrum disorders interacting with a humanoid Robot NAO. Procedia Eng. 2012, 41, 1448–1455.
- Manner, M.D. Identifying differences in social responsiveness among preschoolers interacting with or watching social robots. In Proceedings of the Twenty-Seventh International Joint Conference on Artificial Intelligence—International Joint Conferences on Artificial Intelligence Organization, Stockholm, Sweden, 13–19 July 2018; pp. 5777–5778.
- Shamsuddin, S.; Yussof, H.; Ismail, L.I.; Mohamed, S.; Hanapiah, F.A.; Zahari, N.I. Humanoid robot NAO interacting with autistic children of moderately impaired intelligence to augment communication skills. Procedia Eng. 2012, 41, 1533–1538.
- Shamsuddin, S.; Yussof, H.; Miskam, A.; Hamid, M.A.C.; Malik, N.A.; Hashim, H.; Hanapiah, A.; Ismail, L.I. Humanoid robot NAO as HRI mediator to teach emotions using game-centered approach for children with autism. In Proceedings of the HRI 2013 Workshop on Applications for Emotional Robots, Tokyo, Japan, 3–6 March 2013.
- Anzalone, S.M.; Tilmont, E.; Boucenna, S.; Xavier, J.; Jouen, A.-L.; Bodeau, N.; Maharatna, K.; Chetouani, M.; Cohen, D. How children with autism spectrum disorder behave and explore the 4-dimensional (spatial 3D+time) environment during a joint attention induction task with a robot. Res. Autism Spect. Disord. 2014, 8, 814–826.
- Greczek, J.; Kaszubski, E.; Atrash, A.; Mataric, M. Graded cueing feedback in robot-mediated imitation practice for children with autism spectrum disorders. In Proceedings of the 23rd IEEE International Symposium on Robot and Human Interactive Communication, Edinburgh, UK, 25–29 August 2014; pp. 561–566.
- Desideri, L. Exploring the use of a humanoid robot to engage children with Autism Spectrum Disorder (ASD). Harness. Power Technol. Improve Lives 2017.
- Alemi, M.; Basiri, N.M. Exploring social robots as a tool for special education to teach english to Iranian kids with autism. Int. J. Robot. Theory Appl. 2016, 4, 12.
- Zheng, Z.; Zhao, H.; Swanson, A.R.; Weitlauf, A.S.; Warren, Z.E.; Sarkar, N. Design, development, and evaluation of a noninvasive autonomous robot-mediated joint attention intervention system for young children with ASD. IEEE Trans. Hum. Mach. Syst. 2018, 48, 125–135.
- Kaboski, J.R.; Diehl, J.J.; Beriont, J.; Crowell, C.R.; Villano, M.; Wier, K.; Tang, K. Brief report: A pilot summer robotics camp to reduce social anxiety and improve social/vocational skills in adolescents with ASD. J. Autism Dev. Disord. 2015, 45, 3862–3869.
- Warren, Z.E.; Zheng, Z.; Swanson, A.R.; Bekele, E.; Zhang, L.; Crittendon, J.A.; Weitlauf, A.F.; Sarkar, N. Can robotic interaction improve joint attention skills? J. Autism Dev. Disord. 2015, 45, 3726–3734.
- Anzalone, S.M.; Tanet, A.; Pallanca, O.; Cohen, D.; Chetouani, M. A Humanoid robot controlled by neurofeedback to reinforce attention in autism spectrum disorder. In Proceedings of the 3rd Italian Workshop on Artificial Intelligence and Robotics, Genova, Italy, 28–30 November 2016.
- Wood, L.J.; Robins, B.; Lakatos, G.; Syrdal, D.S.; Zaraki, A.; Dautenhahn, K. Developing a protocol and experimental setup for using a humanoid robot to assist children with autism to develop visual perspective taking skills. Paladyn J. Behav. Robot. 2019, 10, 167–179.
- Iacono, I.; Lehmann, H.; Marti, P.; Robins, B.; Dautenhahn, K. Robots as social mediators for children with autism—A preliminary analysis comparing two different robotic platforms. In Proceedings of the IEEE International Conference on Development and Learning (ICDL), Frankfurt, Germany, 24–27 August 2011; Volume 2, pp. 1–6.
- Lehmann, H.; Iacono, I.; Dautenhahn, K.; Marti, P.; Robins, B. Robot companions for children with down syndrome: A case study. Interact. Stud. 2014, 15, 99–112.
- Wainer, J.; Dautenhahn, K.; Robins, B.; Amirabdollahian, F. Collaborating with kaspar: Using an autonomous humanoid robot to foster cooperative dyadic play among children with autism. In Proceedings of the 10th IEEE-RAS International Conference on Humanoid Robots, Nashville, TN, USA, 6–8 December 2010; pp. 631–638.
- Wood, L.J.; Robins, B.; Lakatos, G.; Syrdal, D.S.; Zaraki, A.; Dautenhahn, K. Piloting scenarios for children with autism to learn about visual perspective taking. In Towards Autonomous Robotic Systems; Giuliani, M., Assaf, T., Giannaccini, M.E., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2018; Volume 10965, pp. 260–270. ISBN 978-3-319-96727-1.
- Robins, B.; Amirabdollahian, F.; Ji, Z.; Dautenhahn, K. Tactile interaction with a humanoid robot for children with autism: A case study analysis involving user requirements and results of an initial implementation. In Proceedings of the 19th International Symposium in Robot and Human Interactive Communication, Viareggio, Italy, 12–15 September 2010; pp. 704–711.
- Lindsay, S.; Hounsell, K.G. Adapting a robotics program to enhance participation and interest in STEM among children with disabilities: A pilot study. Disab. Rehab. Assist. Technol. 2017, 12, 694–704.
- Costa, S.; Santos, C.; Soares, F.; Ferreira, M.; Moreira, F. Promoting interaction amongst autistic adolescents using robots. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology, Buenos Aires, Argentina, 31 August–4 September 2010; pp. 3856–3859.
- Ríos-Rincón, A.M.; Adams, K.; Magill-Evans, J.; Cook, A. Playfulness in children with limited motor abilities when using a robot. Phys. Occupat. Ther. Pediatr. 2016, 36, 232–246.
- Conti, D.; Di Nuovo, A.; Trubia, G.; Buono, S.; Di Nuovo, S. Adapting robot-assisted therapy of children with autism and different levels of intellectual disability: A preliminary study. In Proceedings of the Companion of the 2018 ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 91–92.
- Yun, S.-S.; Park, S.-K.; Choi, J. A robotic treatment approach to promote social interaction skills for children with autism spectrum disorders. In Proceedings of the 23rd IEEE International Symposium on Robot and Human Interactive Communication, Edinburgh, UK, 25–29 August 2014; pp. 130–134.
- Han, B.Y.; Yim, D.; Kim, Y.T.; Lee, S.J.; Hong, K.H. The effect of a story intervention on the syntactic skills of children with autism spectrum disorders by using an educational humanoid robot. Commun. Sci. Disord. 2016, 21, 244–261.
- Jeon, K.H.; Yeon, S.J.; Kim, Y.T.; Song, S.; Kim, J. Robot-based augmentative and alternative communication for nonverbal children with communication disorders. In Proceedings of the ACM International Joint Conference on Pervasive and Ubiquitous Computing—UbiComp ’14 Adjunct, Seattle, WA, USA, 13–17 September 2014; pp. 853–859.
- Marti, P.; Giusti, L. A robot companion for inclusive games: A user-centred design perspective. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010; pp. 4348–4353.
- Marti, P.; Iacono, I. Learning through play with a robot companion. Everyday Technol. Indep. Care 2011, 29, 526–533.
- Pennazio, V. Social robotics to help children with autism in their interactions through imitation. Res. Educ. Media 2017, 9, 10–16.
- Minsky, M. Society of Mind; Simon and Schuster: New York, NY, USA, 1988; ISBN 978-0-671-65713-0.
- Sidiropoulos, G.K.; Bazinas, C.; Lytridis, C.; Papakostas, G.A.; Kaburlasos, V.G.; Kechayas, P.; Kourampa, E.; Katsi, S.R.; Karatsioras, C. Synergy of intelligent algorithms for efficient child-robot interaction in special education: A feasibility study. In Proceedings of the Robotics in Education, Online. 30 September–3 October 2020; pp. 98–105.
- Wan, G.; Deng, F.; Jiang, Z.; Lin, S.; Zhao, C.; Liu, B.; Chen, G.; Chen, S.; Cai, X.; Wang, H.; et al. Attention shifting during child—Robot interaction: A preliminary clinical study for children with autism spectrum disorder. Front. Inf. Technol. Electron. Eng. 2019, 20, 374–387.
More