Since the performance of most machine learning methods mainly depends on the feature extractor used before the classification, the selection of the feature extractor depends on the characteristics of the raw signals. Therefore, the subsequent section is divided into four parts according to the nature of signals, and the different machine learning methods were specified by different paragraphs in each part.
3.1. Fault Diagnosis Based on Process Parameters
The parametric method is a diagnostic method for the reciprocating compressors based on process parameters including the compressor pressure, temperature, flow rate, etc.
3.1.1. Fault Diagnosis Based on p–V Diagram
The compressor pressure can be monitored via p–V diagram, which is one of the most typical process parameters. The p–V diagram is a two-dimensional cycle diagram which shows the variation trend of dynamic pressure in the compressor chamber with the working volume in a working cycle. The fault of the compressor valves, piston rings, support rings, and other components such as shaft, lubrication oil, and bearings can lead to the change of the pressure in the cylinder, and then the shape of the p–V diagram. Hence, the p–V diagram (cylinder pressure) is a very useful parameter for fault diagnosis in reciprocating compressors.
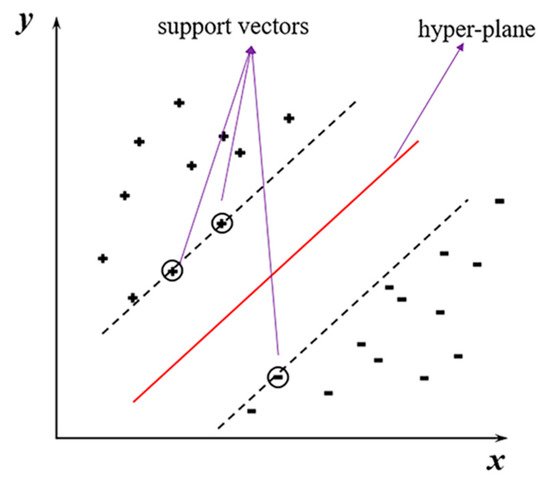
The support vector machine (SVM) has been widely applied in fault diagnosis based on a p–V diagram. Feng et al. [
29] proposed a recognition approach for fault detection based on a p–V diagram using discrete 2D-curvelet transform, nonlinear principal component analysis (PCA), and SVM methods. The data dimension reduction with PCA and the multi-class SVM classifier are used to classify five valve faults in reciprocating compressors. Pichler et al. [
30,
31] detected broken reciprocating compressor valves in the p–V diagram. The gradient of the expansion phase of the p–V diagram, extracted in a logarithmic coordinate, and the pressure difference between the suction and discharge were used as the features to train the SVM classifiers which were aimed to discriminate between the faultless and faulty cases with six kinds of valves, respectively. The method was validated using real-world data and the results showed a high classification accuracy. Wang et al. [
32] introduced an automated evaluation of the p–V diagram. They determined seven invariant moments of the p–V diagram and classified them using the SVM method. In another research [
33], Jiang et al. conducted research on RC p–V diagram fault recognition using the SVM method. The fault features were extracted from the indicator diagram by the feature points extraction method. A fault recognition model was constructed based on multi-classification SVM and decision tree with the feature vectors.
The artificial neural network (ANN) also has been used in fault diagnosis based on p–V diagram. Namdeo et al. [
34] used an ANN method to detect the valve leakage in RCs. The healthy expansion process of the RC was predicted by the functional link network. A back propagation algorithm is applied to predict the percentage of leakage based on the pressure deviation at a particular instant of time. In another study [
35], the features were extracted from raw pressure signal with wavelet packet decomposition. The extracted features, along with temperature data, were used to train a logistic regression model for classifying valve faults. The features were also applied to train a recurrent neural network (RNN) to predict the future performance, namely wavelet energy features of the pressure signal of the system, which could also indicate the detection of the valve failures. Tang et al. [
36] used an ANN method to analyze the fault diagnosis of RC gas valves based on geometrical property of the p–V diagram. The features were applied to train the BP neural network, resulting in a network with 100% recognition rate. In the literature [
37], the p–V diagrams were normalized before the BP neural network was applied to recognize the failure conditions of RCs.
Guerra [
38] extracted data from the dynamic pressure signal processed with a binned fast Fourier transform (FFT) and PCA for the detection of valve faults through Bayesian classification at 50% and 100% load.
Tran et al. [
39] applied a noise removal method on the pressure and current signals, which was based on the wavelet transforms, and adopted a Teager–Kaiser energy operator to estimate the amplitude envelope (AM signal) of the transient vibration signal. Then the DBN was applied to classify the RC valve faults.
The applications of three main traditional ML methods and deep learning in RC fault diagnosis based on p–V diagram were reviewed in this section; it is obvious that SVM and ANN are widely used in this field.
3.1.2. Fault Diagnosis Based on Pressures Measured in Other Volumes
Except for p–V diagrams, pressures measured in other volumes can also be used to recognize faults.
Tiwari and Yadav [
40] applied an ANN method in condition monitoring of a defective RC. The corresponding values of the pressure pulsations in the discharge pipe were simulated to train the ANN for predicting the percent leakage of discharge valves.
Guerra and Kolodziej [
41] proposed a data-driven approach for condition monitoring of RC valves. An FFT was applied to the pressure wave measured in the environment around the discharge valve, and then the FFT values were grouped into several frequency bins. Afterwards, PCA was used to reduce the dimension of the vectors. Finally, the results were used to train the Bayes classifier, which successfully classified various levels of the valve degradation with high accuracy.
The applications of ML methods in RC fault diagnosis based on pressures measured in other volumes (except for cylinder) were reviewed in this section; it is suggested that research about RC fault detection based on pressures measured in volumes is few, and ANN and Bayes classifier were employed.
3.2. Fault Diagnosis Based on Vibration Signals
Vibration analysis is a typical monitoring method of RCs. Many faults in RCs lead to abnormal vibration which could be diagnosed from the vibration signals comprising lots of machinery information.
Qin et al. [
42] presented a novel SVM scheme composed of three steps: denoising via basis pursuit, feature extraction via wave matching, and classification via support vector machine. The basis pursuit was applied to suppress the background noise and enhance the major component in the vibration signal. Then, the feature extraction was carried out by matching the denoised signal with parameterized waveform, which was optimized by a differential evolution algorithm. In the end, the SVM was carried out in the valve fault classification with 100% accuracy. Ren et al. [
27] used SVMs in the automated diagnosis of valve operating conditions. The input features were extracted from the vibration signals using the local wave and higher-order statistical methods. Chen et al. [
43] extracted wavelet packet entropy of vibration signals as working condition eigenvectors, and the signals were trained with an SVM classifier. Cui et al. [
44] proposed an SVM classifier trained with information entropy extracted from vibration signals. Potocnik et al. [
45] developed a semi-supervised approach based on vibration signals which included statistical evaluation extracted from the signals and principal component analysis as preprocess, and then a comparative analysis of classification methods including discriminant analysis (DA), neural networks (NN), SVM, and extreme learning machines (ELM) was conducted. The results showed that the nonlinear classifier performed better. Pichler [
46,
47] focused particularly on valve fault detection under variable operation conditions. The features of the vibration signals were extracted from the spectrogram difference with two-dimensional correlation. The classification performance was validated using SVMs and logistic regression. Pichler [
47] proposed an independent method for detecting the valve faults based on the vibration measurements using several different valves. The classifiers, such as the logistic rule (in a two-class setup) and SVMs (in two-class as well as one-class setup) were compared with each other. The results showed the three classifiers performed equally good for plastic valve faults. However, the two-class SVMs were better for the steel valve faults.
Na Lei et al. [
48] proposed an integration approach based on the local mean decomposition (LMD) method and autoregressive–generalized autoregressive conditional heteroscedasticity (AR-GARCH) model to extract the features of the vibration signal. Then, the back propagation (BP) neural networks were applied to diagnose the faults of RC valves. Lin et al. [
49,
50,
51] conducted research on the automated valve condition classification. They processed the raw vibration signals using time–frequency analysis such as short time Fourier transform (STFT), smoothed pseudo-Wigner–Ville distribution (SPWVD), and the reassigned smoothed pseudo-Wigner–Ville distribution (RSPWVD). Then, a data reduction algorithm was used to extract fault features which was fed to a probabilistic neural network (PNN) for fault classification. Three modification indices were proposed to extract fault features. The results showed that the modified indices were better than the original indices in the literature [
51]. The genetic algorithm was applied to automate the classification process to improve the prediction accuracy [
50]. The authors [
49] further revealed that the applicability of the resigned smooth pseudo-Wigner–Ville distribution (RSPWV) was better than Wigner–Ville distribution (WVD) and the spectrogram (SP) in the probability neural network classification system. Meanwhile, Ahmed et al. [
52,
53] also conducted studies about fault classification on RCs. They found that the classification performance of features from the frequency domain were better than those from the time domain which were extracted from vibration signals with a probabilistic neural network (PNN). They further proposed a PNN optimized by GA, in which classification accuracy was higher than the original one. The authors [
54] also developed a one-against-one scheme based on the relevance vector machine (RVM) and a multiclass multi-kernel RVM (mRVM). Both methods were optimized by GA, and their classification accuracies were up to 97%. Diego Cabrera et al. [
55] developed a long short-term memory (LSTM)-based classifier for valve faults trained with preprocessed vibration time series, and the hyperparameters were optimized by Bayesian method. Li et al. [
56] proposed an improved wavelet neural network (WNN) in which original parameters were obtained by genetic algorithm (GA). Yang et al. [
57] proposed an online network, adaptive resonance theory–Kohonen network (ART–KNN), which performed more suitable than self-organizing feature map and learning vector quantization on production line. In another study [
58], the Wigner–Ville distributions (WVD) of the vibration acceleration signals were calculated and displayed in grey images and the PNN was directly used to classify the new time–frequency images after the images were normalized.
Kolodziej et al. [
59] trained a Bayesian classifier for early detection of the spring fatigue and valve seat wear in RCs, and validated it using experimental data. The vibration data was processed using the Wigner–Ville spectrum and quantified using image-based statistical features. The principal component analysis (PCA) was utilized to reduce the feature space.
Tran et al. [
60] proposed a hybrid deep belief network (HDBN) which integrated the DBN for pretraining and simplified fuzzy ARTMAP (SFAM) for fault classification. The results showed a great improvement in comparison with the original DBN in classification accuracy.
The applications of ML methods in RC fault diagnosis based on vibration signals were reviewed in this section. There are considerable studies focusing on the fault detection techniques based on vibration signals, and similar to p–V diagram, lots of different SVM models and ANN models were employed as classifiers in these cases, whereas Bayes classifier and deep learning were barely used.
3.3. Fault Diagnosis Based on Acoustic Emission (AE)
Acoustic emission refers to the generation of transient elastic waves produced by a rapid release of energy from a localized source within the surface of material, according to the American Society for Testing and Materials (ASTM) [
61,
62]. By detecting AE signals generated in the reciprocating motion, acoustic emission can be used to discriminate the different types of damage occurring in an RC.
Ali et al. [
63,
64] investigated fault detection technologies based on artificial intelligence (AI) and AE signals. They proposed two AI models to detect the valve condition in a reciprocating compressor based on several AE signals using SVM and ANN [
63,
64]. In the literature [
65], the ANN and SVM models were trained and evaluated for detection of valve faults in an RC. The results showed that the accuracy of the ANN and SVM detection methods were similar, but the SVM had better ability of handling a large number of input features with low sampling datasets. Zhang et al. [
66] extracted the root mean square (RMS), average signal level (ASL) of the time domination, and peak value of the frequency domination as the eigenvectors in the SVM model. With the SVM model, the leakage of the pipeline valve could be recognized. Sim et al. [
67] employed the time–frequency analysis of the AE signal through the discrete wavelet transform (DWT) and assessed the characteristics of four acoustic emission parameters [
67]. The result revealed that the acoustic emission root mean square (RMS) performed the best. Then, the k-nearest neighbor (KNN) and support vector machine (SVM) classification methodologies were applied to detect the valve faults with AE RMS before estimation of the valve flow rate through regression model [
20].
The applications of ML methods in RC fault diagnosis based on AE signals were reviewed in this section. The amount of studies in this field is less than for p–V diagram and vibration signal; also, the applications of classifiers mainly focused on ANN and SVM.
3.4. Fault Diagnosis Based on Multi-Source Signals
The faults in RCs are intricate, and it is difficult to recognize all of them by a single signal or parameter. Therefore, it is important to conduct studies on fault detection based on multi-source signals.
Yang et al. [
68] studied the condition classification of a small reciprocating compressor for refrigerators using ANN and SVMs. The noise and vibration signals were wavelet-transformed into the frequency sub-bands and the fault features were extracted using the statistical method. The classification performance of the SVM, self-organizing feature map (SOFM), SOFM associated with learning vector quantization (LVQ), and LVQ were compared with each other. The results showed that the SVM and LVQ methods performed better than the other methods. Zhang et al. [
69] proposed an RC fault diagnosis method based on sensitive parameters extracted by scatter matrix method and SVM. The sensitive parameters were assessed by distance evaluation method. The accuracy of the new method is superior to the traditional methods. A fault detection system integrating data analysis and machine-learning was proposed by Qi et al. [
70]. The raw data was denoised by robust principal component analysis (RPCA) first, then the core information of the compressor signal was extracted by a sparse coding algorithm with online dictionary. Based on the learned dictionary, the potential faults were finally recognized and classified by the SVM using the one-on-one strategy.
Li et al. [
71] proposed an ART–artificial immune network for RC failure detection, integrating the adaptive resonance theory (ART) and artificial immune network (AIN). The network was trained by the suction pressure, discharge pressure, suction, and discharge temperatures from a multilevel RC. Wang et al. [
72] established an RC intelligent diagnosis system based on multi-agent technology. The system involved monitoring agent, management agent, diagnosis agent, diagnosis method agent, fusion agent, human–computer interaction agent, and other modules. The monitoring agent integrated four signal types, such as vibration, temperature, displacement, and pressure. In addition, the diagnosis method agent included the expert system agent, fuzzy logic agent, neural networks agent, and so on.
Zhang et al. [
73] proposed an improved K-means algorithm (K-means algorithm is one of the clustering algorithms) for RC fault diagnosis. This new method has gotten rid of the algorithm’s dependence on the initial clustering centers.
The applications of ML methods in RC fault diagnosis based on multi-source signals were reviewed in this section, and ANN and Bayes classifiers were mainly employed. Meanwhile, in this section, a clustering algorithm (K-means) [
73] was applied in RC fault diagnosis. It can be the guide for future research about RC fault diagnosis.
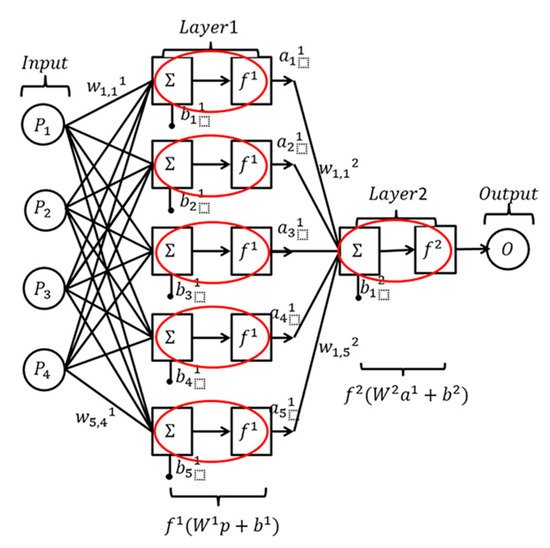
 (the weight matrix for the
(the weight matrix for the  th hidden layer is written as
th hidden layer is written as  (the bias for the
(the bias for the  th neuron in the
th neuron in the  (the transfer function for the th neuron in the th hidden layer is written as ), and an output (the output for the th neuron in the th hidden layer is written as ). Therefore, the calculating function of each neuron is indicated by Equation (1).
(the transfer function for the th neuron in the th hidden layer is written as ), and an output (the output for the th neuron in the th hidden layer is written as ). Therefore, the calculating function of each neuron is indicated by Equation (1).