Communication architecture plays an important role in the intelligent control and autonomous collaboration of UAV (Unmanned Air Vehicle) swarms. And we know that UAV swarm communication architecture technology has already made great progress. When faced with different mission scenarios, there are different communication architectures to choose from. Centralized communication architecture is suitable for scenarios where the UAV swarm is small, and the task is relatively simple. Each individual UAV requires a long-range communication link with the infrastructure. The decentralized communication architecture expands communication coverage through a multi-hop network. The dedicated gateway UAV is responsible for U-T-I (UAV to Infrastructure) communication. The “single-group swarm Ad hoc network” architecture is appropriate for a swarm of the same type UAVs, while “multi-group swarm Ad hoc network” and “multi-layer swarm Ad hoc network” architectures can be deployed using different types of UAVs. In a “multi-group swarm Ad hoc network”, communication between two different groups can also suffer from delays. In addition, in terms of robustness, "multi-layer swarm Ad hoc network" architecture is a relatively reliable system because it overcomes SPOF (Single Point of Failure).
- UAV swarm communication
- Communication Architecture
- Centralized and Decentralized Architecture
Communication architecture plays an important role in the intelligent control and autonomous collaboration of UAV swarms. In the primary stage of the development of a UAV swarm, a central station is available and powerful enough to communicate with the whole UAV swarm. Therefore, the centralized approach was extended from the traditional single-UAV system to UAV swarm communication architecture. As the swarm grows in size, the decentralized approach is proposed. The decentralized approach has a more complex structure and organization, but it does reduce the swarm’s dependence on central stations [1]. Many experts and scholars have devoted themselves to the research of UAV swarm communication architectures. In this section, we review these researches and systematically introduce common communication architectures available for UAV swarm systems. Additionally, we also analyze the pros and cons of these architectures.
Communication architecture plays an important role in the intelligent control and autonomous collaboration of UAV swarms. In the primary stage of the development of a UAV swarm, a central station is available and powerful enough to communicate with the whole UAV swarm. Therefore, the centralized approach was extended from the traditional single-UAV system to UAV swarm communication architecture. As the swarm grows in size, the decentralized approach is proposed. The decentralized approach has a more complex structure and organization, but it does reduce the swarm’s dependence on central stations [36]. Many experts and scholars have devoted themselves to the research of UAV swarm communication architectures. In this section, we review these researches and systematically introduce common communication architectures available for UAV swarm systems. Additionally, we also analyze the pros and cons of these architectures.Centralized Communication Architecture
Centralized communication architecture evolved from single-UAV systems, and was implemented for UAV swarm technology. As shown in
Centralized communication architecture evolved from single-UAV systems, and was implemented for UAV swarm technology. As shown inFigure 1, there is a central node (i.e., fixed networking infrastructure) to which all UAVs in the swarm are connected. Each UAV forms a one-to-one relationship with the infrastructure and directly receives control commands from the infrastructure. This type of centralized communication architecture is relatively stable, adopts simpler routing algorithms, and has a smaller scale. When the size of the UAV swarm and the coverage area of the mission are small and the mission relatively simple, this type of architecture is more suitable. One of the applications of centralized communication architecture is “UAV-GCS Centralized Data-Oriented Communication Architecture”, which is designed for crowd surveillance [2].
, there is a central node (i.e., fixed networking infrastructure) to which all UAVs in the swarm are connected. Each UAV forms a one-to-one relationship with the infrastructure and directly receives control commands from the infrastructure. This type of centralized communication architecture is relatively stable, adopts simpler routing algorithms, and has a smaller scale. When the size of the UAV swarm and the coverage area of the mission are small and the mission relatively simple, this type of architecture is more suitable. One of the applications of centralized communication architecture is “UAV-GCS Centralized Data-Oriented Communication Architecture”, which is designed for crowd surveillance [37].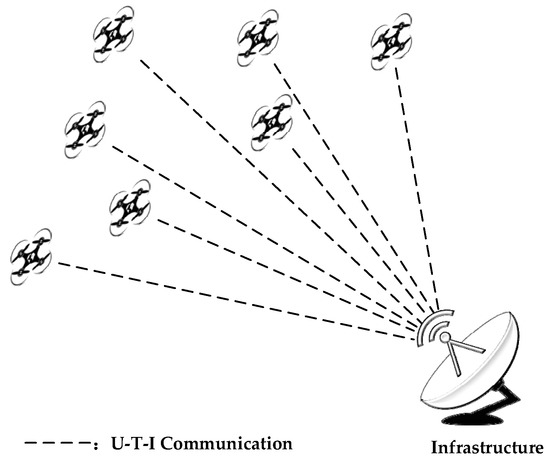
Figure 1. Schematic depicting the centralized communication architecture.
Schematic depicting the centralized communication architecture.However, the connection between UAVs requires infrastructure for transmission. The U-T-I distance is much greater than the U-T-U distance, which causes longer delays. In addition, considering the high mobility of UAVs and the coverage requirements of swarm applications, this architecture is obviously not stable. The infrastructure as a central node also causes the entire communication network to be paralyzed once the ground station or satellite breaks down or is attacked. Therefore, centralized communication architecture has the disadvantage of Single Point of Failure (SPOF). As a result, centralized communication architecture can be regarded as unreliable.
However, the connection between UAVs requires infrastructure for transmission. The U-T-I distance is much greater than the U-T-U distance, which causes longer delays. In addition, considering the high mobility of UAVs and the coverage requirements of swarm applications, this architecture is obviously not stable. The infrastructure as a central node also causes the entire communication network to be paralyzed once the ground station or satellite breaks down or is attacked. Therefore, centralized communication architecture has the disadvantage of Single Point of Failure (SPOF). As a result, centralized communication architecture can be regarded as unreliable.Decentralized Communication Architecture
Because UVAs operate at high speeds and missions may cover large areas, UAVs frequently connect and disconnect to the network. As a result, UAV swarm ad hoc networks are considered the best choice. Under decentralized communication architecture, UAVs conduct real-time interactive communication in an ad hoc manner, thereby eliminating dependence on the infrastructure and eliminating the communication range restrictions [3].
Because UVAs operate at high speeds and missions may cover large areas, UAVs frequently connect and disconnect to the network. As a result, UAV swarm ad hoc networks are considered the best choice. Under decentralized communication architecture, UAVs conduct real-time interactive communication in an ad hoc manner, thereby eliminating dependence on the infrastructure and eliminating the communication range restrictions [38].Single-Group Swarm Ad hoc Network
In a “single-group swarm Ad hoc network” (
In a “single-group swarm Ad hoc network” (Figure 2), an internal communication of the swarm does not depend on the infrastructure. The communication between the swarm and the infrastructure is a single point link relying on a specific UAV called gateway UAV. In this system, other UAVs are relay nodes that forward data within the swarm. Using this method, UAVs in the swarm can share situation information in real time to optimize collaborative control and improve efficiency. Similarly, mutual communication between the gateway UAV and infrastructure also enables the upload and download of swarm information, including instructional information. With regard to the gateway UAV, two additional types of transceivers are necessary: one for communicating with other UAVs at low power and short distances and the other for communication with infrastructure at high power and long reach. As a result, other UAVs in the swarm only need to carry low-cost and lightweight short-reach transceivers. This not only greatly extends the communication range of the network to allow for large coverage requirements, but also makes small UAVs with smaller payloads more useful [4]. However, in order to guarantee the consistent connectivity of the swarm, “single-group swarm Ad hoc network” architecture requires that the flight patterns (speed and heading orientations) of all UAVs in the swarm must be alike. Therefore, a group of small size UAVs is appropriate for scenarios that utilize communication architecture. One example of a “single-group swarm Ad hoc network” is the UAV cloudlet layer in Disaster Resilient three-layered architecture for Public Safety Long-Term Evolution (DR-PSLTE) [5].
), an internal communication of the swarm does not depend on the infrastructure. The communication between the swarm and the infrastructure is a single point link relying on a specific UAV called gateway UAV. In this system, other UAVs are relay nodes that forward data within the swarm. Using this method, UAVs in the swarm can share situation information in real time to optimize collaborative control and improve efficiency. Similarly, mutual communication between the gateway UAV and infrastructure also enables the upload and download of swarm information, including instructional information. With regard to the gateway UAV, two additional types of transceivers are necessary: one for communicating with other UAVs at low power and short distances and the other for communication with infrastructure at high power and long reach. As a result, other UAVs in the swarm only need to carry low-cost and lightweight short-reach transceivers. This not only greatly extends the communication range of the network to allow for large coverage requirements, but also makes small UAVs with smaller payloads more useful [39]. However, in order to guarantee the consistent connectivity of the swarm, “single-group swarm Ad hoc network” architecture requires that the flight patterns (speed and heading orientations) of all UAVs in the swarm must be alike. Therefore, a group of small size UAVs is appropriate for scenarios that utilize communication architecture. One example of a “single-group swarm Ad hoc network” is the UAV cloudlet layer in Disaster Resilient three-layered architecture for Public Safety Long-Term Evolution (DR-PSLTE) [40].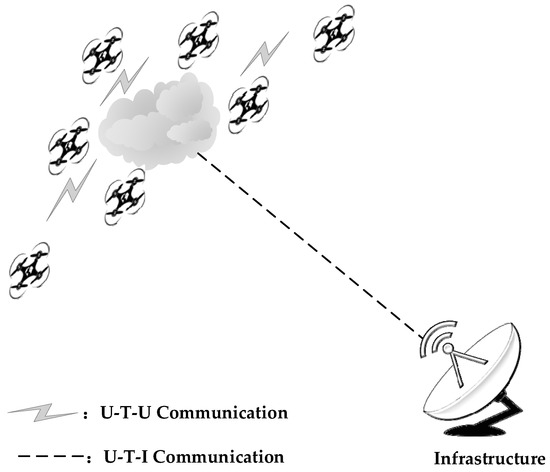
Figure 2. Schematic showing a single-group swarm Ad hoc network.
For mission requirements, intra-swarm communication architecture has undergone several changes [6].
For mission requirements, intra-swarm communication architecture has undergone several changes [33].Figure 3a–c shows three common intra-swarm communication architectures.
a–c shows three common intra-swarm communication architectures.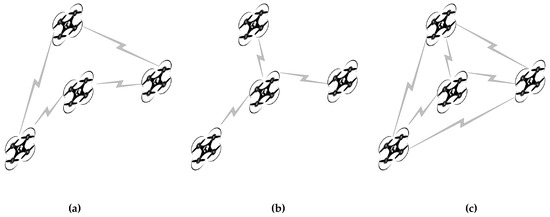
Figure 3.
a
b
c) meshed architecture.
Figure 3b that star architecture has the inherent disadvantage of a SPOF. That is, if the gateway node fails, it will cause the entire system to fail.
b that star architecture has the inherent disadvantage of a SPOF. That is, if the gateway node fails, it will cause the entire system to fail.Meshed architecture is a combination of ring and star architectures and has the advantages of both systems (
Meshed architecture is a combination of ring and star architectures and has the advantages of both systems (Figure 3c). All the UAV nodes in the swarm have the same capabilities, with both terminal nodes and routing functions. The information stream from one node to another can be implemented in different forms, and any UAV can act as a gateway node for the swarm. Meshed architecture has now become the standard for intra-swarm communication systems.
c). All the UAV nodes in the swarm have the same capabilities, with both terminal nodes and routing functions. The information stream from one node to another can be implemented in different forms, and any UAV can act as a gateway node for the swarm. Meshed architecture has now become the standard for intra-swarm communication systems.However, the diversification of missions results in higher demands on the composition of the UAV in a swarm. Practical applications often require the swarm to utilize not only small UAVs, but also medium and large UAVs. Therefore, the aforementioned “single-group swarm Ad hoc network” architecture obviously does not meet these needs. While similar UAVs can often fly close in proximity, different types of UAVs can be far away from each other. Therefore, the UAVs in the swarm are divided into different groups, with similar UAVs located within the same proximity. These are known as “multi-group swarm Ad hoc network” and “multi-layer swarm Ad hoc network” architectures, as described below.
However, the diversification of missions results in higher demands on the composition of the UAV in a swarm. Practical applications often require the swarm to utilize not only small UAVs, but also medium and large UAVs. Therefore, the aforementioned “single-group swarm Ad hoc network” architecture obviously does not meet these needs. While similar UAVs can often fly close in proximity, different types of UAVs can be far away from each other. Therefore, the UAVs in the swarm are divided into different groups, with similar UAVs located within the same proximity. These are known as “multi-group swarm Ad hoc network” and “multi-layer swarm Ad hoc network” architectures, as described below.Multi-Group Swarm Ad hoc Network
To address the shortcomings of a “single-group swarm Ad hoc network”, the “multi-group swarm Ad hoc network” (
To address the shortcomings of a “single-group swarm Ad hoc network”, the “multi-group swarm Ad hoc network” () integrates both a centralized architecture and a “single-group swarm Ad hoc network” architecture. Different types of groups have different applications depending on the mission. Overall, the architecture is organized in a centralized manner as described in . While the difference is that the intra-group UAVs communicate with each other in an Ad hoc manner. The intra-group communication architectures are the same as the intra-swarm communication architectures described inSection 12.2.1. Inter-group communications, i.e., the Group-to-Group (G-T-G) communications, are performed through the infrastructure, so the gateway UAVs are still responsible for communicating with the infrastructure. When mission scenarios require a variety of UAVs, a “multi-group swarm Ad hoc network” architecture can be employed. However, attention must be paid to the robustness of this architecture, as the “multi-group swarm Ad hoc network” architecture is semi-centralized. At the same time, for G-T-G communication between two UAVs in different groups, “multi-group swarm Ad hoc network” architecture still suffers from high latency. One specific application of multi-group architecture is multi-theater joint operations for military operations. The central control center communicates with different UAV swarms, and the swarms rush to the mission area from various directions, according to the control instructions [7].
. Inter-group communications, i.e., the Group-to-Group (G-T-G) communications, are performed through the infrastructure, so the gateway UAVs are still responsible for communicating with the infrastructure. When mission scenarios require a variety of UAVs, a “multi-group swarm Ad hoc network” architecture can be employed. However, attention must be paid to the robustness of this architecture, as the “multi-group swarm Ad hoc network” architecture is semi-centralized. At the same time, for G-T-G communication between two UAVs in different groups, “multi-group swarm Ad hoc network” architecture still suffers from high latency. One specific application of multi-group architecture is multi-theater joint operations for military operations. The central control center communicates with different UAV swarms, and the swarms rush to the mission area from various directions, according to the control instructions [41].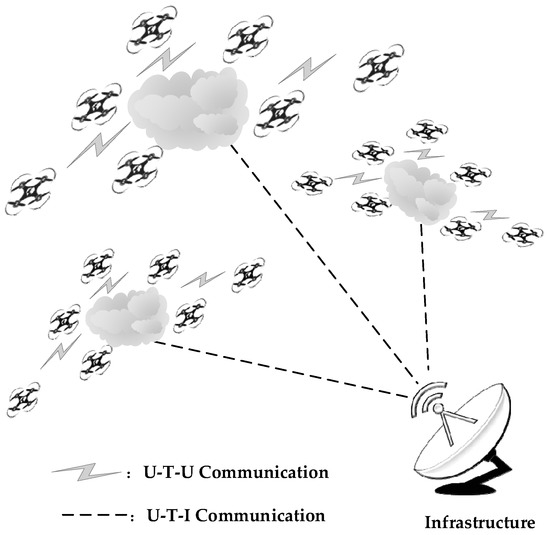
Figure 4. Schematic of a multi-group swarm Ad hoc network.
Schematic of a multi-group swarm Ad hoc network.Multi-layer Swarm Ad hoc Network
“Multi-layer swarm Ad hoc network” architecture is another type of architecture that is suitable for a mass variety of UAVs. As shown in
“Multi-layer swarm Ad hoc network” architecture is another type of architecture that is suitable for a mass variety of UAVs. As shown in , this architecture is significantly advanced compared to the “multi-group swarm Ad hoc network” architecture. A group of adjacent UAVs of the same type constitutes an Ad hoc network, which is the first layer of the communication architecture. The architecture of intra-group communications is elaborated as explained inSection 12.2.1. Different types of UAV groups rely on gateway UAVs to perform G-T-G communication, which comprises the second layer. The closest gateway UAV communicates with the infrastructure, which is the third layer of the architecture. Communication between any two UAVs in the “multi-layer swarm Ad hoc network” architecture does not require infrastructure relay. Mutual communication of UAVs in the same group takes place at the first level. Communication between UAVs in different groups is routed through the gateway UAV. Data packets go through the first and second layers in turn. Therefore, there is no SPOF in the “multi-layer swarm Ad hoc network,” and this type of architecture is robust.
. Different types of UAV groups rely on gateway UAVs to perform G-T-G communication, which comprises the second layer. The closest gateway UAV communicates with the infrastructure, which is the third layer of the architecture. Communication between any two UAVs in the “multi-layer swarm Ad hoc network” architecture does not require infrastructure relay. Mutual communication of UAVs in the same group takes place at the first level. Communication between UAVs in different groups is routed through the gateway UAV. Data packets go through the first and second layers in turn. Therefore, there is no SPOF in the “multi-layer swarm Ad hoc network,” and this type of architecture is robust.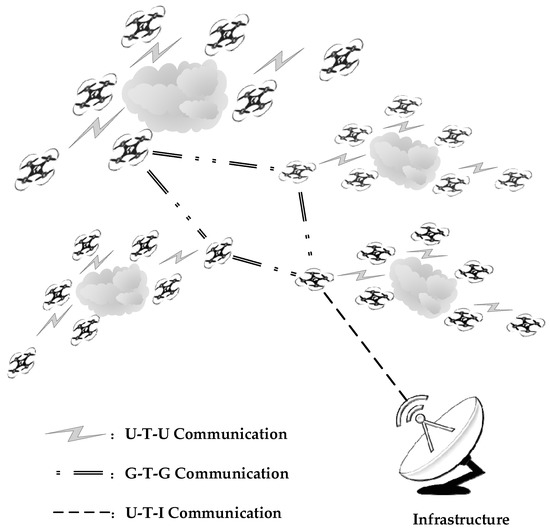
Figure 5. Schematic of multi-layer swarm Ad hoc network.
Schematic of multi-layer swarm Ad hoc network.In a mission, when the number of UAVs changes, the “multi-layer swarm Ad hoc network architecture compensate for the increase or decrease of UAV nodes and quickly implement network reconstruction. Therefore, the multi-layer swarm Ad hoc network architecture is appropriate for scenarios where UAV swarm missions are complicated: there are a huge number of UAVs executing the mission, the network topology changes, and communication between the UAV nodes is frequent. With the research and development of UAV swarms and the advancement of communication technology, one possible improvement includes the number of layers required to form a swarm Ad hoc network architecture with more UAVs, resulting in larger task coverage and a more robust network [8].
In a mission, when the number of UAVs changes, the “multi-layer swarm Ad hoc network architecture compensate for the increase or decrease of UAV nodes and quickly implement network reconstruction. Therefore, the multi-layer swarm Ad hoc network architecture is appropriate for scenarios where UAV swarm missions are complicated: there are a huge number of UAVs executing the mission, the network topology changes, and communication between the UAV nodes is frequent. With the research and development of UAV swarms and the advancement of communication technology, one possible improvement includes the number of layers required to form a swarm Ad hoc network architecture with more UAVs, resulting in larger task coverage and a more robust network [35].Remarks
As discussed, we know that UAV swarm communication architecture technology has already made great progress. When faced with different mission scenarios, there are different communication architectures to choose from.
As discussed, we know that UAV swarm communication architecture technology has already made great progress. When faced with different mission scenarios, there are different communication architectures to choose from.Table 1 summarizes the advantages and disadvantages of the four mentioned architectures. Centralized communication architecture is suitable for scenarios where the UAV swarm is small, and the task is relatively simple. Each individual UAV requires a long-range communication link with the infrastructure. The decentralized communication architecture expands communication coverage through a multi-hop network. The dedicated gateway UAV is responsible for U-T-I communication. The “single-group swarm Ad hoc network” architecture is appropriate for a swarm of the same type UAVs, while “multi-group swarm Ad hoc network” and “multi-layer swarm Ad hoc network” architectures can be deployed using different types of UAVs. In a “multi-group swarm Ad hoc network”, communication between two different groups can also suffer from delays. In addition, in terms of robustness, "multi-layer swarm Ad hoc network" architecture is a relatively reliable system because it overcomes SPOF.
2 summarizes the advantages and disadvantages of the four mentioned architectures. Centralized communication architecture is suitable for scenarios where the UAV swarm is small, and the task is relatively simple. Each individual UAV requires a long-range communication link with the infrastructure. The decentralized communication architecture expands communication coverage through a multi-hop network. The dedicated gateway UAV is responsible for U-T-I communication. The “single-group swarm Ad hoc network” architecture is appropriate for a swarm of the same type UAVs, while “multi-group swarm Ad hoc network” and “multi-layer swarm Ad hoc network” architectures can be deployed using different types of UAVs. In a “multi-group swarm Ad hoc network”, communication between two different groups can also suffer from delays. In addition, in terms of robustness, "multi-layer swarm Ad hoc network" architecture is a relatively reliable system because it overcomes SPOF.Table 12. Summary of Communication Architectures.
| Features | Centralized Communication Architecture | Decentralized Communication Architecture | ||
|---|---|---|---|---|
| Single-Group | Multi-Group | Multi-Layer | ||
| Multi-hop Communication | × | √ | √ | √ |
| UAVs Relay Traffic | × | √ | √ | √ |
| Different Types of UAVs | × | × | √ | √ |
| Self-configuration | × | √ | × | √ |
| Limited Coverage | √ | √ | √ | × |
| Single Point of Failure | √ | × | √ | × |
| Robustness | √ | × | × | √ |
Note: “√” = supported, “×” = not supported.
Note: “√” = supported, “×” = not supported.When discussing the advantages and disadvantages of the UAV swarm communication architectures, we often focus on the requirements of high coverage and maintaining connectivity. High coverage plays an important role in gathering intelligence and analyzing situations. Only by maintaining connectivity can the real-time communication of the swarm be guaranteed. However, UAV swarms often perform tasks in unknown environments, and the appearance of threats and obstacles is random in time and space. Therefore, it is essential that members withdraw or rejoin. This leads to the impossibility for a disruption-free connectivity. This mainly depends on signal attenuation due to propagation loss. To achieve an uninterrupted connection, on the one hand, the distance in the UAV swarm ad hoc network configuration should not exceed the sensitivity of the receiver, and must be limited to the minimum signal-to-noise ratio (SNR) or receive signal strength indicators (RSSI) range, respectively Inside [7]. On the other hand, the wisdom of bird flocks and fish schools in nature is worth learning from. UAVs in a swarm should be able to react cognitively to changes of the environment to adapt their movement to positions with channel characteristics. This is undoubtedly beneficial for achieving uninterrupted connections. In addition, existing researchers have used the high-efficiency bandwidth of 4G wireless networks to improve the connection stability of UAV swarm in wide coverage areas [9]. The emerging 5G wireless network will provide higher technical support for these studies.
When discussing the advantages and disadvantages of the UAV swarm communication architectures, we often focus on the requirements of high coverage and maintaining connectivity. High coverage plays an important role in gathering intelligence and analyzing situations. Only by maintaining connectivity can the real-time communication of the swarm be guaranteed. However, UAV swarms often perform tasks in unknown environments, and the appearance of threats and obstacles is random in time and space. Therefore, it is essential that members withdraw or rejoin. This leads to the impossibility for a disruption-free connectivity. This mainly depends on signal attenuation due to propagation loss. To achieve an uninterrupted connection, on the one hand, the distance in the UAV swarm ad hoc network configuration should not exceed the sensitivity of the receiver, and must be limited to the minimum signal-to-noise ratio (SNR) or receive signal strength indicators (RSSI) range, respectively Inside [42]. On the other hand, the wisdom of bird flocks and fish schools in nature is worth learning from. UAVs in a swarm should be able to react cognitively to changes of the environment to adapt their movement to positions with channel characteristics. This is undoubtedly beneficial for achieving uninterrupted connections. In addition, existing researchers have used the high-efficiency bandwidth of 4G wireless networks to improve the connection stability of UAV swarm in wide coverage areas [43]. The emerging 5G wireless network will provide higher technical support for these studies.