The common actuation way of CRs usually requires external motor to provide energy Which is connected to the body of CRs by circuit and will undoubtedly affect the flexibility of CRs. Smart material actuation has emerged in recent 30 years [
38]. The commonly intelligent materials including SMA, EAP, DEA, and so forth [
103,
104,
105]. Because the intelligent material can be used as a CRs ontology or embedded in the robot body without rigid motor, and the energy source can be natural energy such as light, temperature or humidity. Smart materials actuation can achieve the integration of CRs and driven system as well as the flexibility. DEA, EAP, IPMC and other actuation material need external electric field to complete driving due to their own properties, which limits the application scope of CRs based on smart material driven to some extent. So in recent years, scientists have been looking for new CRs actuation materials.
Shape Memory Alloy (SMA) is a kind of material composed of more than two kinds of metal elements. Its mass is small, and easy to realize the miniaturization automation and noise-free working of the actuator. The driving principle of SMA is to change the high temperature austenite into the low temperature martensite under the high temperature, and its original shape is damaged and deformed, which drives the robot to move. The driving energy of SMA need not completely rely on electric field, but also change the temperature of the robot body with the help of light energy [
106]. At the same time, the electrothermal effect of SMA has the defect as low drive frequency, which limits the movement of CRs. Kim et al. in Reference [
107] have proposed a method that relies on the optical effect of SMA, which is still based on optothermal and optical trapping effects of laser to cause temperature change, but higher sensitivity compared to the traditional thermo effects. The micro-robot is controlled by a laser that provides wireless space and time selection. During the actuation process, the robot exhibits crawling movements, including those triggered by the SMA, to remove the surface adhesion, photothermal, and propulsion caused by the optical trap effect. Optical driving does not require wires and pipes, as electric drives do, nor do magnetic driving require many external devices, making robotic systems more autonomous and lightweight. As an unfettered stimulus, light can be more flexible to drive the robot. In addition to driving based on thermal effect, optical driving can also be actuated directly through optical effect with the help of photosensitive materials. Alcaide et al. [
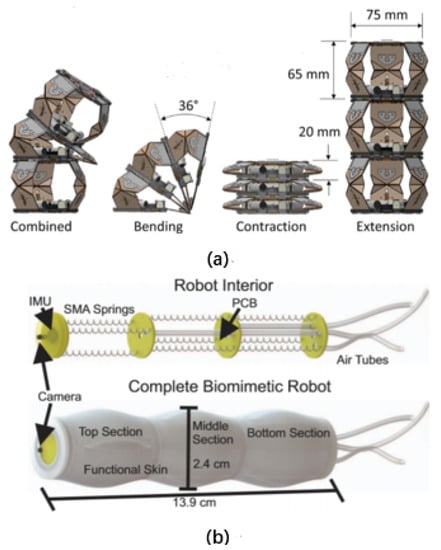
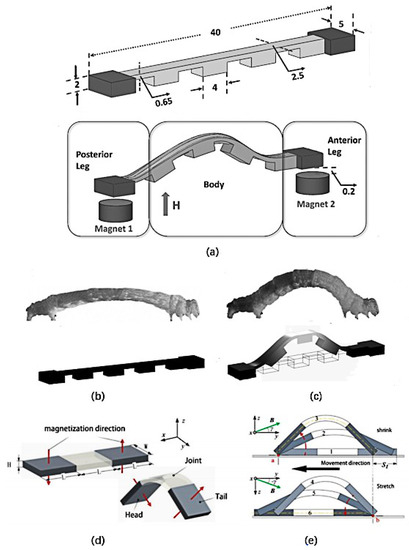
102] used SMA springs and silica gel to make a three-stage worm-like robot. The robot was composed of three identical parts, each with three SMA springs at 120 degrees and made of silicone skin, as shown in b. For the purpose of enhancing the operational capability of CRs in finite space, Tian et al. [
108] proposed a new central support structure with the spiral cutting mode. By analyzing the different cutting modes of thin-wall tube of superelastic NiTi SMA, the spiral hollow scheme was chose. The spiral hollow scheme was selected through analysing different cutting patterns of the thin-walled superelastic NiTi SMA tube. For the sake of providing a reference for the design and modelling methods, they systematically introduced from design method to manufacturing process of the central support structure using superelastic NiTi SMA material. Due to the advantages of SMA spring with high power density, compact structure and MRI-compatibility, Shao et al. [
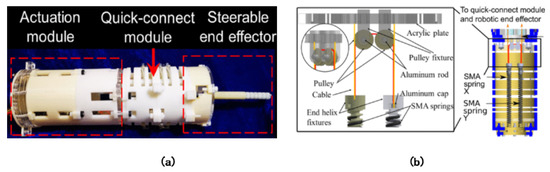
104] proposed SMA spring-based actuation module and integrated it with quick-connect module and steerable end-effcetor into a highly compact and adaptable MRI-condition system, thus simplifying the surgical procedure of MRI room. Each drive cable is connected to the SMA spring through the end helically-threaded fixture so that the cable ends with the aluminum cap fixed in the clamp and the SMA spring is tightened on the clamp (as shown in ). In conclusion, SMA actuation structure is light in weight and can be miniaturized, but the temperature is difficult to control and the drive frequency is low.
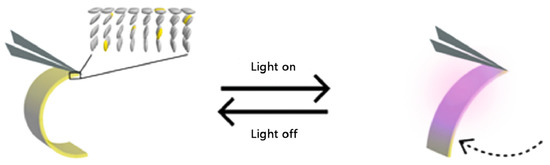
Jiaxin Shi of Peking University prepared GO (GO)/rGO (reduced GO) Janus films with a thickness of 15 um using laser direct writing technology. This film can respond to change in environmental humidity, and the reaction effect is best at a thickness of 15 um. A leaf grabber was prepared by using this actuator to grasp leaves in humid environment. This overcomes the problem that traditional intelligent material is difficult to arrange electric field in humid environment. Marina et al. developed a light driven robot with liquid crystal network (LCN) as the raw material. The robot uses an external LED as the power source. When driven by specific wavelength light, the robot legs made of liquid crystal network will be deformed as shown in to push the robot forward. In addition to the simplicity of the driving system, light driving has a higher driving efficiency than electric driving [
109].