Temperature sensors have been is bncreasingly demanded in various applications such as military, aerospace, scientific research, industry, agriculture, medicine, transportation and so on. Based on the sensory device (CMOS, BJT or resistor) and the measured signal type (voltage, current, frequency, delay time, phase shift or bandwidth), they can be implemented in various ways. By defining the temperature estimation function X(T) as the ratio of two quantities chosen from tREF, t(T), fREF and f(T), a time domain temperature sensor can be implemented based on one among 12 types of operational principles.
- time domain
- temperature sensor
- temperature estimation function
1. Introduction
Temperature sensors have been increasingly demanded in various applications such as military, aerospace, scientific research, industry, agriculture, medicine, transportation and so on. Based on the sensory device (CMOS, BJT or resistor) and the measured signal type (voltage, current, frequency, delay time, phase shift or bandwidth), they can be implemented in various ways [1][2][3][4][5][6][7][8][9][10][11][12][13][14][15][16][17][18][19][20][21][22]. In this paper, we have chosen a time domain CMOS temperature sensor by considering the following factors.
First, measuring something is to represent it by using a ratio of two quantities, i.e., one is to be measured and the other is to be a reference. For example, the height of a person can be represented by a multiple of foot length as shown in
Temperature sensors have been increasingly demanded in various applications such as military, aerospace, scientific research, industry, agriculture, medicine, transportation and so on. Based on the sensory device (CMOS, BJT or resistor) and the measured signal type (voltage, current, frequency, delay time, phase shift or bandwidth), they can be implemented in various ways [1,2,3,4,5,6,7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22]. In this paper, we have chosen a time domain CMOS temperature sensor by considering the following factors.Figure 1. So, we need both the person and the reference foot length to measure the height. Even when the height is measured in a metric system, we also need both the person and the reference meter.
. So, we need both the person and the reference foot length to measure the height. Even when the height is measured in a metric system, we also need both the person and the reference meter.
Figure 1. Measuring something is to represent it by a ratio of two quantities.
Measuring something is to represent it by a ratio of two quantities.Second, measuring temperature by using a temperature sensor does not mean that we can directly measure temperature itself. What we can really measure by using a temperature sensor are the voltage or current signals or the frequencies or delay times which are one-to-one matched to the temperature.
Third, as CMOS process technology improves, the supply voltage is getting lower and lower and the clock speed is getting higher and higher, which means that the voltage resolution is degraded, whereas the time resolution is improved. This trend has naturally made time domain signal-based circuits more attractive than ever before.
2. Discussion
Thus, in this entry we present a new type of time domain CMOS temperature sensor which can estimate temperature by measuring a frequency and a delay time. As summarized in
Second, measuring temperature by using a temperature sensor does not mean that we can directly measure temperature itself. What we can really measure by using a temperature sensor are the voltage or current signals or the frequencies or delay times which are one-to-one matched to the temperature.REF
, τ(T), 1/fREF
and 1/f(T). Here, T is the temperature and τREF
is defined as a temperature-independent reference delay time of a delay cell or a delay line, and τ(T) is defined as a temperature-dependent delay time of a delay cell or a delay line. Similarly, fREF
is defined as a temperature-independent reference frequency of an oscillator or a clock signal, and f(T) is defined as a temperature-dependent frequency of an oscillator or a clock signal. If we arbitrarily choose two quantities from these four different kinds of time domain signals and put them into the numerator and denominator of X(T), respectively, overall 16 types of operational principles can theoretically exist, as shown inFigure 2. However, if the two quantities are irrelevant to T at the same time, we cannot use them for temperature estimation.
. However, if the two quantities are irrelevant to T at the same time, we cannot use them for temperature estimation.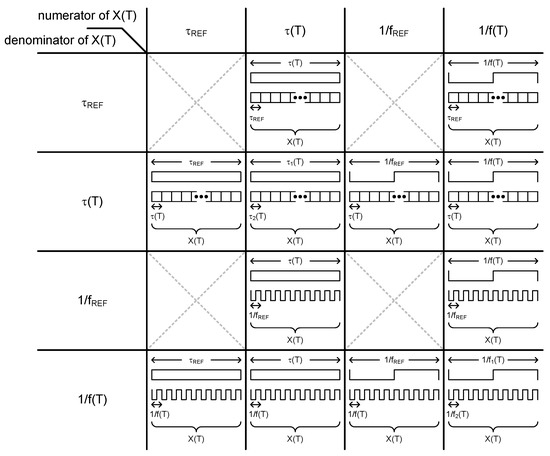
Figure 2. Twelve types of operational principles based on X(T).
Twelve types of operational principles based on X(T).