The utilization of abundant blue energy in the ocean could greatly contribute to achieving carbon neutrality. However, the unsolved economic and technical challenges of traditional technologies for harvesting blue energy have resulted in slow progress. Triboelectric nanogenerators (TENGs), as a new approach for converting mechanical energy into electricity, have great potential for blue energy harvesting, which can be connected as networks with different numbers of units for varying scales of energy harvesting. Here, recent advances of networking strategies of TENGs for harvesting blue energy are reviewed, mainly concerning mechanical and electrical connection designs. Anchoring strategies of devices and networks are also discussed. The development of TENG networks could provide an effective solution for large-scale ocean blue energy harvesting, which can also serve as an in-situ energy station or power source for self-powered systems, supporting various marine equipment and activities.
- triboelectric nanogenerator
- network
- blue energy
- wave energy
- energy harvesting
1. Introduction
2. Triboelectric Nanogenerator Networks for Blue Energy
2.1. Working Principle of Triboelectric Nanogenerators
The TENGs convert mechanical energy into electricity through the coupling of triboelectrification and electrostatic induction, classified into five working modes: contact-separation mode, lateral-sliding mode, single-electrode mode, free-standing mode, and rolling mode (Figure 1a–e) [9][11][18][9,11,18].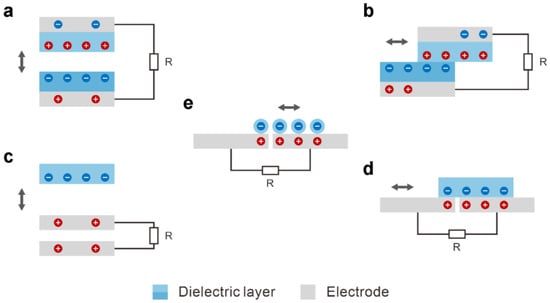
2.2. General Network Architecture
For large-scale blue energy harvesting, typically, networks consisting of a large number of TENG units need to be constructed, as shown in Figure 2a. The network based on a hierarchical architecture comprises multiple modules, each composed of TENG units. The working mechanism of a typical rolling ball structure unit is illustrated in Figure 2b. Under the agitation of water waves, a dielectric ball rolls inside a sphere made of another dielectric material, generating opposite triboelectric charges on both surfaces.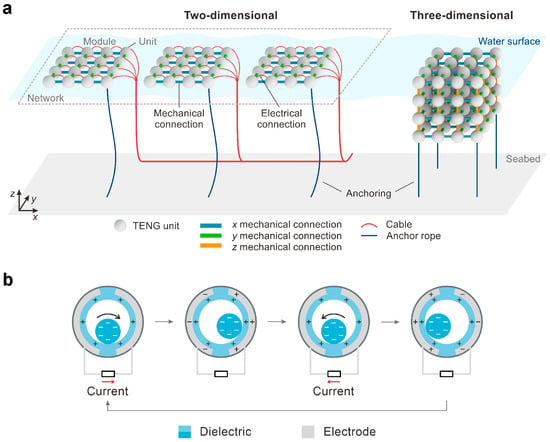
2.3. Typical Triboelectric Nanogenerator Units
3. Mechanical Connection
3.1. Simple Aggregation with Weak Coupling
Simple aggregation with weak coupling is the simplest form of networking structures, where units are either not connected or connected by strings, typically. In weakly coupled networks, mechanical connections primarily serve to fix the relative positions of the units within the network, with minimal interaction between units. Bai et al. designed a string-connected network structure of a compound device with pendulum and multilayer structures [22][27]. The device is constrained from the bottom with ropes, allowing for rotation around the connection point. When subjected to water wave excitation, the mass block freely swings together with the rotator, and the stator and shell move around the bottom connection point. After that, the device swings back under the influence of buoyancy and adjacent waves. The ropes connecting the units are under tension, serving to fix the relative positions of the devices and anchor them.3.2. Strongly Coupled Networks
A strongly coupled network is a networking strategy that enhances interactions between units in the network, typically using elastic connection structures. Characterized by its constraint effect, energy transfer, and cooperative effect, the strongly coupled network improves the output performance of units, which represents a large-scale, high-performance networking strategy of TENGs for harvesting blue energy. Hu et al. proposed a hyper-elastic network of wheel-structured TENGs [23][34]. The units are interconnected with an improved elastic connection structure based on a silicone plate with meshes, exhibiting nonlinearity in their stress–strain behavior and allowing for large elastic stretching. In contrast to the traditional smooth shells of devices, blade structures are added on the surface of the shell, enhancing the interaction between units and waves. This design allows the device to roll on the water surface like a wheel, agitating the internal TENG to output electrical energy. The blade structure combined with the elastic connection structure, which stores and releases wave energy, enables efficient wave energy harvesting. Firstly, with an imbalanced force applied by waves or wind from one side, the rectangular frame of the unit moves translationally, inducing the shell with blades to roll on the water surface, while the orientation of the internal rotator remains nearly unchanged due to the gravitational force of the mass block. Secondly, with the wave agitation between units, the elastic connection structure undergoes stretching and shrinking, driving the relative movement of the rectangular frames and causing the shells to roll. Finally, under wave impacts, the swinging of the mass block inside the unit can also generate relative movements between the stator and the rotator, resulting in electrical outputs. In simulated waves, with a load resistance of 5 MΩ, the peak power and average power of two units are 1.125 mW and 0.1612 mW, respectively.3.3. Dynamic Self-Assembly Networks
In a harsh marine environment, enhancing the mechanical robustness of network connections and maintaining the operational state of the network are critical challenges underlying network applications. The dynamic self-assembly networking strategy offers a viable solution to this issue, showcasing self-assembly behavior during the construction of the device network and self-healing behavior after network disconnection in extreme environments, which represent autonomy and mechanical robustness. Yang et al. constructed a dynamic self-assembly network based on the connection structure of self-adaptive magnetic joints (SAM joints) [24][25]. The SAM joint contains a well-confined magnetic ball structure. When the joints approach each other, the magnetic poles align automatically with the ball rotation and attract to connect. The design of a limit block restricts joint degrees of freedom, maintaining the network configuration in the horizontal plane while allowing for wave agitation in the vertical direction.3.4. Chiral Networks
Chiral networks are a type of network based on chiral connection structures between units. Chiral connections break the symmetry of connections between units, and the asymmetric connection structure converts the interaction forces between units into torques acting on the units, causing units to rotate, which matches the excitation modes of most high-performance units. Chiral connection structures can use elastic materials to store energy, driving the units in reciprocal oscillation. The unique agitation mechanism of chiral networks can be further combined with other mechanical principles to achieve efficient harvesting of blue energy. Wang et al. proposed a chiral network structure based on the contact-separation mode of TENGs [25][35]. In this design, the units are connected to each other through a pair of elastic rods fixed at the top and bottom of the shells, respectively. With wave excitation, the force on the bending elastic rods imposes a torque at the shell, causing the units to tilt. During the recovery process of the elastic rods, a torque in the opposite direction is generated, driving the units to tilt in the opposite direction. During the reciprocal tilting process, the slider can move relative to the stator in the direction perpendicular to the contact surface to achieve the contact-separation motion of the device.3.5. Three-Dimensional Networks
The three-dimensional (3D) network refers to a TENG network that extends from the water surface to a certain depth underwater, forming a 3D spatial structure. Through a well-thought-out design of units and connection structures, strong interactions between the 3D network and the water body can be realized, enabling the harvesting of wave energy not only from the water surface but also from a certain depth underwater. Li et al. proposed a 3D chiral TENG network based on metamaterial structures [26][37]. Consisting of floats, chiral units, and ligaments. The chiral units have a semi-spherical mass shell on one side, forming an unbalanced structure. The units are connected by ligaments along the vertical direction to create an asymmetric chiral chain extending underwater. The top-layer floats keep the network’s position relative to the water surface. The distributed units within the network can achieve effective motion and energy transfer through chiral connections, transmitting local agitation to different parts of the network. The dynamic behavior of this network is similar to the response of chiral mechanical metamaterials to mechanical waves.4. Electrical Connection
4.1. Rectification and Power Management
Most TENG units output alternating current (AC), and the direction of the current depends on the motion state of the device. When network units with asynchronous motions are directly electrically connected, current from the units can have opposite directions and cancel each other out, leading to decreased performances. Therefore, for asynchronous unit outputs in the network, rectification is performed separately for each unit before the electrical connection for a merged output. After rectification, the AC output of the units is converted into direct current (DC). In this situation, the units are partly isolated, and the damage of one unit will not affect the output of the other units. For networks with synchronous motions, the units can be directly electrically connected to form the total output before the rectification, reducing cost and complexity. However, this increases the impact of damage of a single unit without the isolation effect provided by independent rectification. The electrical output of TENG units has a relatively high voltage and low current. Parallel connections are usually adopted for the units in the network to increase the output current. Power management circuits are usually adopted to further tune the output, which can lower the voltage, enhance the current, and address the impedance mismatch between the high impedance of the TENG network and the low impedance of the application devices.4.2. Networking Topology and Cable Loss
For the electrical connection and power transmission of TENG networks on a large scale, balancing cable loss and cable cost becomes important due to the significantly increased cable length. Liu et al. proposed four basic forms of network topology, which have different cable lengths, and studied the influence of cable impedance on network output, providing a theoretical foundation for the optimization of large-scale power networks [27][39]. To leverage the characteristics of the two topology structures, a third electrical networking topology with a hierarchical structure is proposed, where the TENG network is divided into multiple modules, and each module includes multiple units. In each module, connections are made using the first networking topology, while connections between modules use the second network’s topology. The fourth electrical networking topology, has an alternate structure, with the connections within each module using the second networking topology and the connections between modules using the first network topology. Computational results indicate that for networks containing the same number of units, adopting the third networking topology allows the TENG network to maintain a high transmission efficiency with relatively fewer cables. This is of significant importance for large-scale TENG networks, as the reduction in cable length can not only lower production costs but also reduce the complexity of TENG networks.5. Anchoring Strategy
5.1. Directly Anchoring to the Seabed
Anchoring is essential for ensuring the position of the devices in a harsh marine environment and should also adapt to the operational mode of the TENG. Directly connecting the units to the seabed is the simplest and most direct anchoring method, applicable for devices of various sizes and weights. However, the cost can be relatively high. In simulated wave environment experiments, a method of attaching the units directly to the wave tank wall is used for simulating the case. The directly anchoring strategy has been applied in traditional wave energy harvesting equipment, which is called the Archimedes wave swing (AWS). The AWS is typically an air-filled cylinder immersed in water [28][41]. The cover of the air chamber can move vertically relative to the base fixed to the seabed. When the wave peak is above the AWS, the volume decreases due to the water pressure. Conversely, when the wave valley is above the AWS, the volume increases due to the internal air pressure. By altering the internal air pressure and volume of the AWS, the system frequency can be changed. When the system frequency matches the wave frequency, the linear motion’s displacement can be much larger than the wave height. Energy is harvested from this process using a linear generator. Due to the specific working principle of the AWS, this device is directly anchored to the seabed to keep it submerged in water while maintaining the orientation of the device and the relative fixation of one end of the air chamber, which ensures that the AWS remains in its normal working state. In a tower-like TENG unit proposed by Xu et al., PTFE balls roll between two electrodes, attached to a curved nylon film, to generate electricity, and the spatial utilization and output of the device are increased through a multilayer design [29][42]. In wave tank experiments, the unit’s bottom is fixed to the tank bottom with a rope, simulating the effect of directly anchoring to the seabed in a real marine environment. Under the actions of waves, the unit swings, lighting up 540 LEDs. Anchoring this device to a fixed point on the seabed through a rope keeps this device near the water surface, where wave energy is mainly distributed. Meanwhile, the anchoring rope can assist the device to swing under waves, effectively agitating the device, and its reasonable structural design can realize resonance with waves to enhance its output.5.2. Attaching to Another Large Structure
Anchoring to another large structure, such as buoys anchored to the seabed, maritime vehicles, or other objects, serves as a more convenient anchoring method. Wen et al. proposed a hybrid generator attached to an offshore platform [30][46]. This device consists of a spiral interdigital electrode TENG and a wrap-around EMG, containing three coaxially arranged cylindrical tubes. The outermost tube with adhered blades is responsive to water flow, enabling the device to operate in rotation and oscillation modes. Inspired by seaweed structures, Wang et al. designed a flexible seaweed-like TENG that can attach to various surfaces [31][48]. The friction layers are sealed within the PTFE layers to prevent contact with water. When the device periodically vibrates under excitation, the FEP film contacts and separates from the PET film cyclically, converting mechanical energy into electricity. Due to its flexibility, the device can attach to various structures, making it suitable for different marine applications, such as floating buoys, coastal power stations, and breakwaters.5.3. Anchoring as a Part of a Network
Connecting to the network can also be regarded as an anchoring strategy for units. As integral parts of the network, the units are subjected to the constraint effect of mechanical connections, fixing their relative positions within the network and maintaining a specific device orientation. When a part of the network is anchored on the seabed, other units in the network are indirectly anchored. In the network strategy proposed by Li et al. for a 3D chiral TENG network [26][37]. This TENG network consists of several sub-networks, and each sub-network comprises multiple tubular modules, with their ends anchored to the seabed in practical applications. The power management modules collecting energy from each sub-network can distribute power for various applications or transmit energy to the mainland or islands through cables. In the practical tubular module, adjacent layers have a 60° angle between them and are connected through modified ligament connections. Each unit is well constrained in this configuration, and when folded, it ensures a more stable stacking state. In this network, the end of the tubular module should be constrained, which allows for effective stretching of the module under waves. The constraints can be realized by connecting to a large damper or to the seabed, which can also realize the anchoring of the network.6. Summary
Diverse mechanical connections in the networks exhibit variations in the interactions among units and water waves, adapting to various networking requirements. In weakly coupled networks, the interaction among network units is minimal, and the units are almost independent. Strongly coupled networks, with the constraint effect, energy transfer, and cooperative effect, greatly enhance the interaction in the network. Dynamic self-assembly networks are designed to adapt to complex marine environments, featuring self-healing properties and reducing maintenance costs. Chiral networks convert wave excitation into an agitation torque acting on the units, and when combined with other mechanical mechanisms, the unit can achieve monodirectional continuous motion. Three-dimensional networks extend the network below the water surface, enabling the simultaneous harvesting of wave energy from all directions at a certain depth underwater, thereby enhancing energy utilization. The electrical connection should first consider the motion synchronization of network units and the requirement for rectification. The topology of electrical connections can be optimized to balance their cable losses and costs. Power management modules are also usually integrated to address the impedance mismatch between network outputs and application devices. The multifunctional design of cables can realize the functions of energy harvesting, mechanical connections, and electrical connections simultaneously.