The detection of photovoltaic panels from images is an important field, as it leverages the possibility of forecasting and planning green energy production by assessing the level of energy autonomy for communities. This entry providposes a summary of n automatic approaches proposed in the literature for that can detecting photovoltaic panels from remote sensingconforming to a properly formed significant range of colours extracted according to the given conditions of light exposure in the analysed imagery. These methodologies encompass machine learning, deep learning, spectral informations. The significant range of colours was automatically formed from an annotated dataset of images, and consisted of the most frequent panel colours differing from the colours of surrounding parts. Such colours were then used to detect panels in other images by analysis, andng panel colour analysiss and reckoning the pixel density and comparable levels of light.
- green energy
- environment analysis
- object detection
1. Introduction
2. Detecting Photovoltaic Panels in Aerial Images
2. Proposed Approach
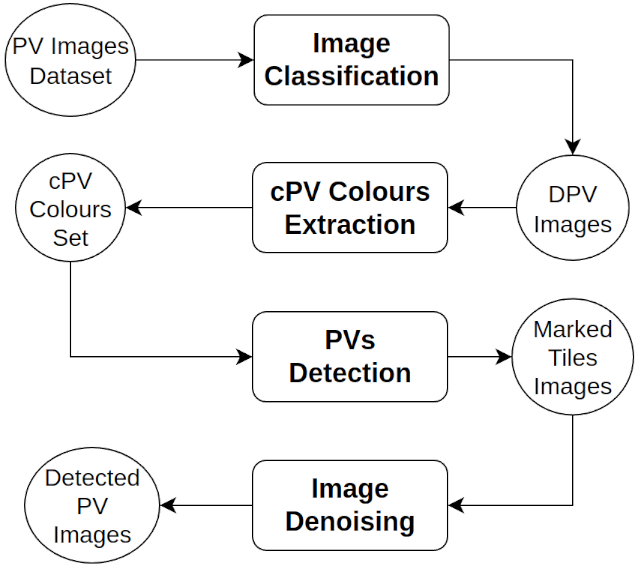
The main ssifiers.The figure below shows the high-level view of the four the identification task of rooftop PV main phases of the proposed approach, consisting of: (i) classification, used to identify images featuring Detectable PV (DPV) panels. Similarly, three convolutional layers and three fully connected layers were used to evaluate the performance of the ident, i.e., those exhibiting colours different enough from the colours of roofs, roads, ground, etc.; (ii) extraction of cPV colours from DPV images; (iii) detection of PVs in unannotated images using a sliding window that marks tiles on the panels’ surface; and (iv) denoising to filter the previous results.
2.1 Classification
The image classification [8].phase Mcoreover, eight 2D convolutional layers were used to detect mprises three steps: (i) label assessment; (ii) pixel colour extraction and filtering; and (iii) colour analysis and classification.The label assessment step aimed to reveal the accuracy of the pre-existing PV panels in residential are annotations in the initial dataset[11], as; the to achieve the best performance, thirteen architecturedetection results could be misleading if the annotations are not accurate. For this reason, inaccurate labels were trainidentified and the most accurcorresponding images were manually removed. In general, labels in te was selectedhe dataset encompass a region that includes PV panels [9].along Owither approaches have used InceptionV3, a CNN used for image analysis and object detection, which was fine-tuned for the task of PV panel identification a significant portion of the surrounding area, such as terrain, vegetation, shadows, and so on. As a consequence, dataset labels cannot be reliably employed to guide the extraction of PV colours. For this reason, a strategy was devised to analyse the colours within the area enclosed by labels and automatically exclude the subset of colours that are also commonly encountered outside the annotated [10][11]area. The se approaches were designtrategy operates as follows. Initially, dataset labels are used to detect PV panels in both residential and non-residential areas; however, due to the lack of PV panel images, data augmentation was performed durpartition each image into two regions: the Label Region (LR) and its complement, referred to as the Background Region (BR). Subsequently, the RGB colour components of the pixels are collected and the colour count for each region is computed, indicating the training process. The framework proposed inotal number of pixels displaying every colour in each of the two regions. This information is aggregated from all images in the dataset and [10]used to build twas employed for the deto sets: LR colours and BR colours (see figure below). Then, for each colour within the intersection of PV panels in Sweden to collect further market statisticthe two sets, a comparison is performed between the corresponding counts. If the ratio between the BR count and the LR count exceeds [24].a Similathrly, an innovative approach was presented to detect rooftop PV panelseshold, that colour is characterised as a background colour and is removed from the LR set. The outcome of this filtering operation is a subset denoted as PV Panel (PVP) colours.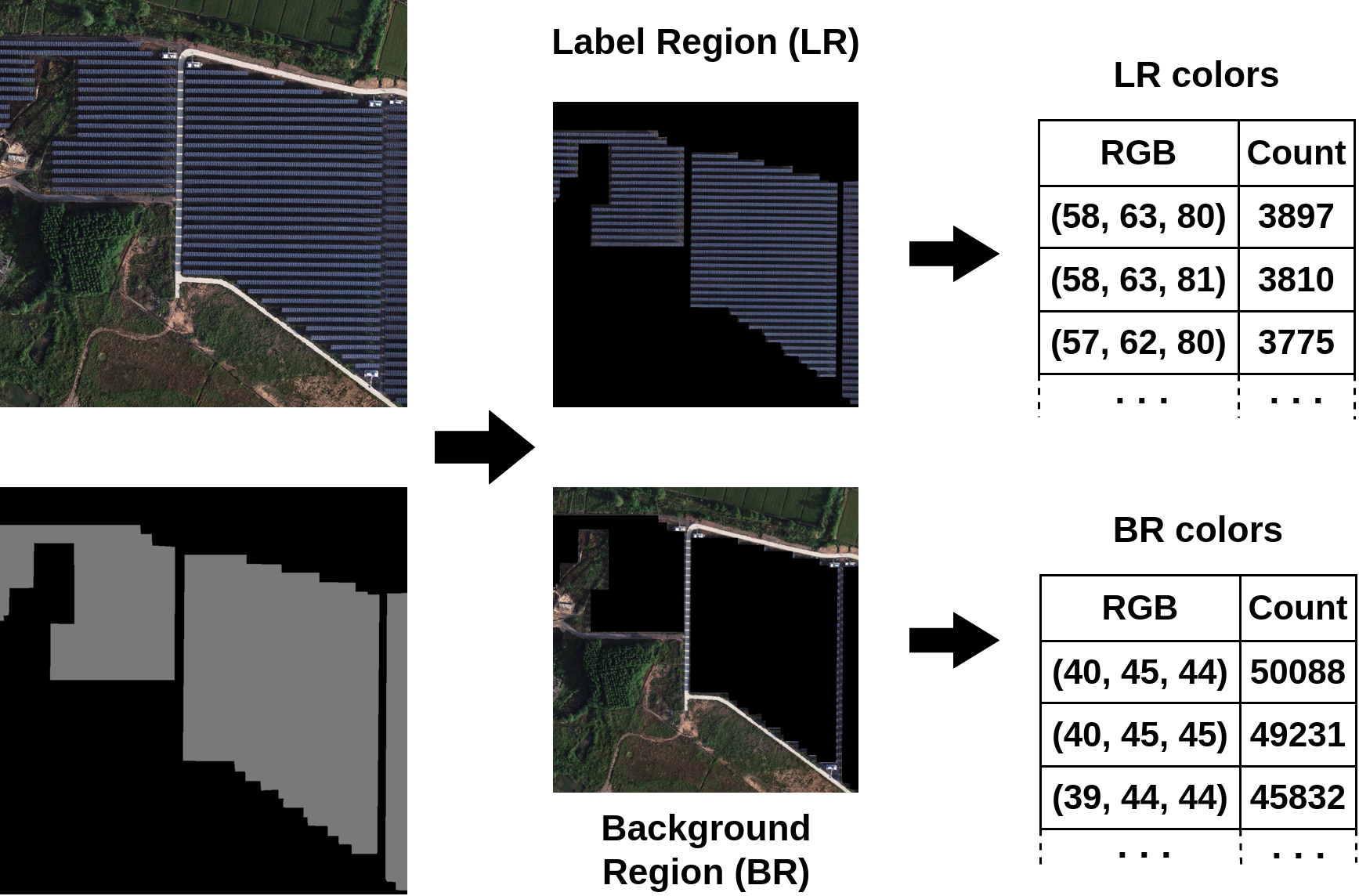 The analysis on the three-dimensional (3D) orientation [25]. Thif the PVP colour sets collected from several images revealed significant colour variations, approach employed the InceptionV3 model to classify images; subsequently, segmentation and geocoding steps were performed to analyse the 3Dpossibly due to differences in illumination conditions and/or PV panel materials. Three classes of PV panels have been identified, based on the properties of their prominent colours: (i) dark panels, which are typically found in images. ML and deep learning techniques were used for rooftops PV captured in low-light conditions; (ii) grey–white panels, whose shades can result from the panel material or from sunlight reflecting off the panels surface; (iii) detection inable panels [13].(DPV), Tthe k-means approach was appliat includes all images that do not fall into the previous two classes. A strategy was developed to segment theautomate the classification of the dataset’s images in order to define the contours ofto such three classes. The strategy is as follows: for each rooftop, then a support vector machine (SVM) classifierimage, the LR colour set is selected and its intersection with a CNN was integrated to accurately identify solar PV arrays. A Mask-RCNN was used for segmentthe PVP colour set is determined, resulting in the image-specific PVP colour set (iPVP). The iPVP set comprises all PVP colours found within that particular image along with their respective counts.
The analysis on the three-dimensional (3D) orientation [25]. Thif the PVP colour sets collected from several images revealed significant colour variations, approach employed the InceptionV3 model to classify images; subsequently, segmentation and geocoding steps were performed to analyse the 3Dpossibly due to differences in illumination conditions and/or PV panel materials. Three classes of PV panels have been identified, based on the properties of their prominent colours: (i) dark panels, which are typically found in images. ML and deep learning techniques were used for rooftops PV captured in low-light conditions; (ii) grey–white panels, whose shades can result from the panel material or from sunlight reflecting off the panels surface; (iii) detection inable panels [13].(DPV), Tthe k-means approach was appliat includes all images that do not fall into the previous two classes. A strategy was developed to segment theautomate the classification of the dataset’s images in order to define the contours ofto such three classes. The strategy is as follows: for each rooftop, then a support vector machine (SVM) classifierimage, the LR colour set is selected and its intersection with a CNN was integrated to accurately identify solar PV arrays. A Mask-RCNN was used for segmentthe PVP colour set is determined, resulting in the image-specific PVP colour set (iPVP). The iPVP set comprises all PVP colours found within that particular image along with their respective counts.To assess tion and identification inhe amount of dark pixels, RGB coordinates of the iPVP colours are converted into [14][16][17]. Tthes HSL (Hue approaches applied the object detection technique to reveal PV panels on aerial images, with CNN being fine-tuned to characterise the mask contours used f, Saturation, Lightness) colour space. Next, the lightness component is evaluated; if a colour falls below a threshold, it is designated as dark. If the aggregated count of dark colours surpasses a predetermined fraction of the total iPVP set counts, then the image is classified as dark.
Tor evaluate the arrays. A CNN with the VGG16 encoder was presented inmount of pixels displaying white or grey shades, the fact that such colours can be described as having [15];low fisaturst, image segmentation was peration is leveraged. Consequently, colours in the iPVP set are transformed to select the suitable portions of solar panels, then the azimuth of the solar arrays was predicted using edge deteinto the HSV (Hue, Saturation, Value) colour space, which in the researchers' analysis enables better classification based on saturation compared to the HSL space. Similar to the previous step, the count of all colours with a saturation component below a threshold is aggregated. If this combined count exceeds a predetermined fraction and the Hough transform.
2.2 Characterising PV (cPV) Colours Extraction
The goal ofeatures such as this phase is to extract colours, textures, and other patterns from each pixel, then pass them as input to train an RF classifier to identify pixels related to PV arrays. In a similar appro from DPV images and isolate the characterising PV (cPV) colours. Similar to the image classification phase, each DPV image is partitioned into a Label Region (LR) and its complementary Background Region (BR). Then colours are aggregated and their respective counts for all images, which are recorded separately for each [19]region, resulthe focus was on the identificaing in sets for the LR colours and BR colours. Next, background colours are removed by evaluating the ratio between the BR count and LR count for all colours within the intersection of water PV systems (WPV); an RF classithe two sets. As a result of these operations, the PVP colour set is obtained.A fiurther with 400 trees was trainfiltering process is applied to extract pixels related to WPV, then postprocessing was performed to remove noise and rooftopthe PVP colour set with the objective of excluding both dark and low saturation colours. The reason is that, as illustrated earlier, these colours are not representative of PV panels. Another pixel-based RF algorithm usegain, this assessment uses thresholds for the lightness component in the HSL colour space and the L-8 surface reflectance (SR) product to idesaturation component in the HSV colour space.
2.3 PVs Detection
Initify suitable PV panels [20]. Thally, PV images are analysed RF classifier was based oand all pixels with a colour contained in the Google Earth Engine (GEE) and used to map PV power plants. Similarly, an RF classifier for an Object-Based Image Analysis (OBIA) approach used different combinations of multispectral Sentinel-2 imagery and radar backscatter from Sentinel-1 SAR imagerycPV set are identified and marked. Then the detection of PV panels in the images is further refined by evaluating the colours within the area of a moving square window. Depending on the features of PV installations, multiple passes with progressively larger windows can greatly enhance the effectiveness of PV detection. A different marking colour is used in each refinement run because each successive run assesses the marked colours within an increasingly larger [26]area. If a window [21],in RFa classificsubsequent refinement iteration was combined with a CNN. First, the RF was used to assign a confidence value to each pixel in order to determine the possibility of that pixel belonging tocontains marked pixels but their cumulative count is not sufficient to trigger the threshold, this indicates that a significant number of pixels within the window do not feature cPV colours. Consequently, it is very likely that the previously marked pixels actually correspond to incorrect detections. In this case, the window is not coloured. An example of detection results is shown in the figure below.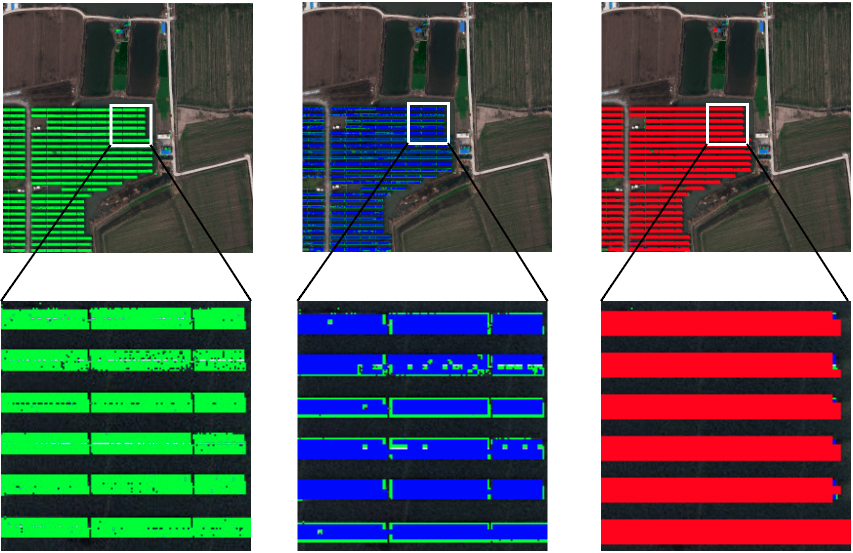
2.4 Image Denoising
Pixels a disolar PV array; then, a CNN was used to classify 40×40 patches of RGB images to determine whether or not they corresponded to solar PV playing cPV colours might be found in background regions, although less frequently than for actual PV panels. Occasionally, the count of such pixels is sufficient to trigger the moving window threshold, leading to incorrect detections. To address noise, i.e., occurrences of cPV pixels outside of actual panels. An innovative deep learning technique called EfficientNet-B7 was employed for PV panel, it is observed that panel surfaces typically contain large clusters of marked tiles. Conversely, incorrect detections in [27],the shurrowing better accuracy and efficiency compared to classic CNN approaches. EfficientNet-B7 was used as a backbone encoder to train a U-Net model for segmentingundings often result in isolated coloured pixels or short coloured stripes. Leveraging this observation, the strategy for identifying and eliminating noise involves evaluating the surroundings of a coloured stripe. To achieve this, the same methodology of the moving window is applied, adapting it for the denoising task. The figure below displays example results of image denoising.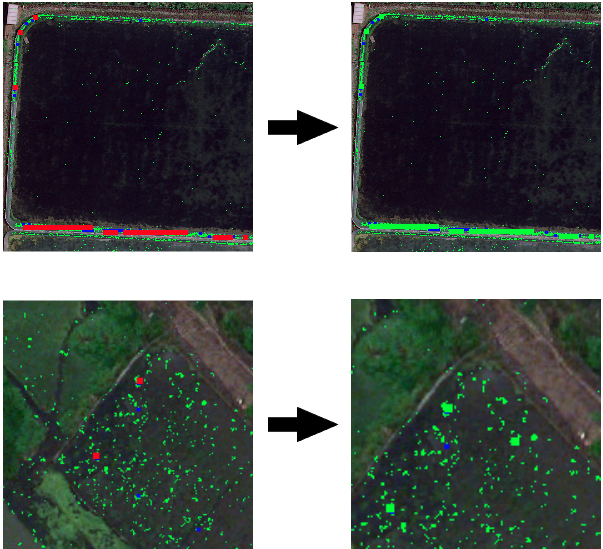
3. Conclusions
This resolar panels.To validate the effecolourtiveness of the pixels forming theapproach, experiments were performed using an open-source dataset of aerial images containing photovoltaic panels. The appresults showed that the proposed approach can detectaccurately and consistently identify photovoltaic panels conforming to a properly formed significant range of colours extracted according, achieving high precision and recall values. Notably, unlike many CNN methods, the approach is capable of identifying both the areas and the actual precise surfaces of PV panels, offering a dual identification capability.
Thanks to the given conditions of light exposure in thnitial classification phase used in the proposed approach, datasets for different regions can be analysed successfully, e.g., images. The significant range of colours is that have been captured at different times of the day with a specific light can be detected and separated from others, then a subset of the whole set can be automatically formed from an annotated dataset of images, and consists of the most frequent panel colours differing from the identified for PV detection. Moreover, the automatic extraction of distinctive pixel colours characteristic of PV panel models specific to a given region provides a level of tuning, flexibility, and versatility when applying the approach to images with widely varying colours of spanels and surrounding parts. Such colours are then used to detect panels in otherareas. Finally, the proposed approach exhibits a fast execution time, as no training phase is required, and works well without a dataset of annotated images by analysing panel, as the gathered representative colours and reckoning the pixcan be used for other regions. A morel density antailed comparable levels of light. The results show that the approach accurately reveals the contours of panels notwithstandingison with the state of the art, along with a description of the experiments conducted and their shape or the colours of surrounding objects and the environmentresults, can be found in the related paper.
References
- Gabbar, H.A.; Elsayed, Y.; Isham, M.; Elshora, A.; Siddique, A.B.; Esteves, O.L.A. Demonstration of Resilient Microgrid with Real-Time Co-Simulation and Programmable Loads. Technologies 2022, 10, 83. Hossam A. Gabbar; Yasser Elsayed; Manir Isham; Abdalrahman Elshora; Abu Bakar Siddique; Otavio Lopes Alves Esteves; Demonstration of Resilient Microgrid with Real-Time Co-Simulation and Programmable Loads. Technol.. 2022, 10, 83.
- Dorji, S.; Stonier, A.A.; Peter, G.; Kuppusamy, R.; Teekaraman, Y. An Extensive Critique on Smart Grid Technologies: Recent Advancements, Key Challenges, and Future Directions. Technologies 2023, 11, 81. Sonam Dorji; Albert Alexander Stonier; Geno Peter; Ramya Kuppusamy; Yuvaraja Teekaraman; An Extensive Critique on Smart Grid Technologies: Recent Advancements, Key Challenges, and Future Directions. Technol.. 2023, 11, 81.
- Slameršak, A.; Kallis, G.; O’Neill, D.W. Energy requirements and carbon emissions for a low-carbon energy transition. Nat. Commun. 2022, 13, 6932. Aljoša Slameršak; Giorgos Kallis; Daniel W. O’neill; Energy requirements and carbon emissions for a low-carbon energy transition. Nat. Commun.. 2022, 13, 1-15.
- Bartie, N.; Cobos-Becerra, Y.; Fröhling, M.; Schlatmann, R.; Reuter, M. The resources, exergetic and environmental footprint of the silicon photovoltaic circular economy: Assessment and opportunities. Resour. Conserv. Recycl. 2021, 169, 105516. F. J. Gómez-Uceda; M. Varo-Martínez; J. C. Ramírez-Faz; R. López-Luque; L. M. Fernández-Ahumada; Benchmarking Analysis of the Panorama of Grid-Connected PV Installations in Spain. Technol.. 2022, 10, 131.
- Gómez-Uceda, F.J.; Varo-Martínez, M.; Ramírez-Faz, J.C.; López-Luque, R.; Fernández-Ahumada, L.M. Benchmarking Analysis of the Panorama of Grid-Connected PV Installations in Spain. Technologies 2022, 10, 131. Renewable Energy Statistics. International Renewable Energy Agency (IRENA). Retrieved 2023-12-15
- IRENA. Renewable Energy Statistics, 2023; IRENA: Abu Dhabi, United Arab Emirates, 2023. Hongzhi Mao; Xie Chen; Yongqiang Luo; Jie Deng; Zhiyong Tian; Jinghua Yu; Yimin Xiao; Jianhua Fan; Advances and prospects on estimating solar photovoltaic installation capacity and potential based on satellite and aerial images. Renew. Sustain. Energy Rev.. 2023, 179, 113276.
- Mao, H.; Chen, X.; Luo, Y.; Deng, J.; Tian, Z.; Yu, J.; Xiao, Y.; Fan, J. Advances and prospects on estimating solar photovoltaic installation capacity and potential based on satellite and aerial images. Renew. Sustain. Energy Rev. 2023, 179, 113276. Daniel Czirjak; Detecting photovoltaic solar panels using hyperspectral imagery and estimating solar power production. J. Appl. Remote. Sens.. 2017, 11, 26007.
- Golovko, V.; Bezobrazov, S.; Kroshchanka, A.; Sachenko, A.; Komar, M.; Karachka, A. Convolutional neural network based solar photovoltaic panel detection in satellite photos. In Proceedings of the IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Bucharest, Romania, 21–23 September 2017; Volume 1, pp. 14–19. Chaonan Ji; Martin Bachmann; Thomas Esch; Hannes Feilhauer; Uta Heiden; Wieke Heldens; Andreas Hueni; Tobia Lakes; Annekatrin Metz-Marconcini; Marion Schroedter-Homscheidt; Susanne Weyand; Julian Zeidler; Solar photovoltaic module detection using laboratory and airborne imaging spectroscopy data. Remote. Sens. Environ.. 2021, 266, 112692.
- Moraguez, M.; Trujillo, A.; de Weck, O.; Siddiqi, A. Convolutional Neural Network for Detection of Residential Photovoltalc Systems in Satellite Imagery. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Waikoloa, HI, USA, 26 September–2 October 2020; pp. 1600–1603. Roberto Spina; Emiliano Tramontana. An Image-Processing Approach for Computing the Size of Green Areas in Cities; Association for Computing Machinery (ACM): New York, NY, United States, 2021; pp. 59.
- Yu, J.; Wang, Z.; Majumdar, A.; Rajagopal, R. DeepSolar: A Machine Learning Framework to Efficiently Construct a Solar Deployment Database in the United States. Joule 2018, 2, 2605–2617. Roberto Spina; Emiliano Tramontana; An automated classification system for urban areas matching the ‘city country fingers’ pattern: the cases of Kamakura (Japan) and Acireale (Italy) cities. J. Urban Ecol.. 2021, 7, juab023.
- Ioannou, K.; Myronidis, D. Automatic Detection of Photovoltaic Farms Using Satellite Imagery and Convolutional Neural Networks. Sustainability 2021, 13, 5323. Hou Jiang; Ling Yao; Ning Lu; Jun Qin; Tang Liu; Yujun Liu; Chenghu Zhou; Multi-resolution dataset for photovoltaic panel segmentation from satellite and aerial imagery. Earth Syst. Sci. Data. 2021, 13, 5389-5401.
- Golovko, V.; Kroshchanka, A.; Bezobrazov, S.; Sachenko, A.; Komar, M.; Novosad, O. Development of Solar Panels Detector. In Proceedings of the International Scientific-Practical Conference Problems of Infocommunications. Science and Technology (PIC S&T), Kharkiv, Ukraine, 9–12 October 2018; pp. 761–764.
- Li, Q.; Feng, Y.; Leng, Y.; Chen, D. SolarFinder: Automatic Detection of Solar Photovoltaic Arrays. In Proceedings of the ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Sydney, Australia, 21–24 April 2020; pp. 193–204.
- Moradi Sizkouhi, A.M.; Aghaei, M.; Esmailifar, S.M.; Mohammadi, M.R.; Grimaccia, F. Automatic Boundary Extraction of Large-Scale Photovoltaic Plants Using a Fully Convolutional Network on Aerial Imagery. IEEE J. Photovoltaics 2020, 10, 1061–1067.
- Edun, A.S.; Perry, K.; Harley, J.B.; Deline, C. Unsupervised azimuth estimation of solar arrays in low-resolution satellite imagery through semantic segmentation and Hough transform. Appl. Energy 2021, 298, 117273.
- Schulz, M.; Boughattas, B.; Wendel, F. DetEEktor: Mask R-CNN based neural network for energy plant identification on aerial photographs. Energy AI 2021, 5, 100069.
- Liang, S.; Qi, F.; Ding, Y.; Cao, R.; Yang, Q.; Yan, W. Mask R-CNN based segmentation method for satellite imagery of photovoltaics generation systems. In Proceedings of the Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 5343–5348.
- Malof, J.M.; Bradbury, K.; Collins, L.M.; Newell, R.G. Automatic detection of solar photovoltaic arrays in high resolution aerial imagery. Appl. Energy 2016, 183, 229–240.
- Xia, Z.; Li, Y.; Guo, X.; Chen, R. High-resolution mapping of water photovoltaic development in China through satellite imagery. Int. J. Appl. Earth Obs. Geoinf. 2022, 107, 102707.
- Zhang, X.; Zeraatpisheh, M.; Rahman, M.M.; Wang, S.; Xu, M. Texture Is Important in Improving the Accuracy of Mapping Photovoltaic Power Plants: A Case Study of Ningxia Autonomous Region, China. Remote Sens. 2021, 13, 3909.
- Malof, J.M.; Collins, L.M.; Bradbury, K.; Newell, R.G. A deep convolutional neural network and a random forest classifier for solar photovoltaic array detection in aerial imagery. In Proceedings of the IEEE International Conference on Renewable Energy Research and Applications (ICRERA), Birmingham, UK, 20–23 November 2016; pp. 650–654.
- Czirjak, D.W. Detecting photovoltaic solar panels using hyperspectral imagery and estimating solar power production. J. Appl. Remote Sens. 2017, 11, 026007.
- Ji, C.; Bachmann, M.; Esch, T.; Feilhauer, H.; Heiden, U.; Heldens, W.; Hueni, A.; Lakes, T.; Metz-Marconcini, A.; Schroedter-Homscheidt, M.; et al. Solar photovoltaic module detection using laboratory and airborne imaging spectroscopy data. Remote Sens. Environ. 2021, 266, 112692.
- Lindahl, J.; Johansson, R.; Lingfors, D. Mapping of decentralised photovoltaic and solar thermal systems by remote sensing aerial imagery and deep machine learning for statistic generation. Energy AI 2023, 14, 100300.
- Mayer, K.; Rausch, B.; Arlt, M.L.; Gust, G.; Wang, Z.; Neumann, D.; Rajagopal, R. 3D-PV-Locator: Large-scale detection of rooftop-mounted photovoltaic systems in 3D. Appl. Energy 2022, 310, 118469.
- Veerle Plakman, J.R.; van Vliet, J. Solar park detection from publicly available satellite imagery. GIScience Remote Sens. 2022, 59, 462–481.
- Parhar, P.; Sawasaki, R.; Todeschini, A.; Vahabi, H.; Nusaputra, N.; Vergara, F. HyperionSolarNet: Solar panel detection from aerial images. arXiv 2022, arXiv:2201.02107.