Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 1 by Pengyue Zhao and Version 2 by Fanny Huang.
Mars, which is adjacent to Earth in the solar system and shares similar physical dimensions and topography. The Mars surface harbors a thin atmosphere, which enables the development of Mars spacecraft. However, the complex atmospheric conditions greatly impact the operation of Martian spacecraft. In the field of rotary-wing Mars UAV research, numerous scholars have conducted extensive investigations into the following aspects: (i) the feasibility of rotary-wing Mars UAVs’ flight; (ii) the vertical-takeoff-and-landing (VTOL) capabilities of rotary-wing Mars UAVs; (iii) the development of prototypes for rotary-wing Mars UAVs.
- Mars UAV
- unmanned aerial vehicles (UAVs)
1. Introduction
Mars, which is adjacent to Earth in the solar system and shares similar physical dimensions and topography, provides a comprehensive record of the birth and evolution of planets in the past 4.5 billion years in the solar system [1][2][1,2]. Therefore, Mars exploration is important in expanding human habitation space and exploring the origin of life [3]. Over 40 Mars exploration missions have been implemented worldwide, with over 80% failing to achieve their intended objectives. Even Mars rovers that have successfully landed face the risks of becoming trapped in sand pits or experiencing mechanical failures [4]. In the 20th century, the former Soviet Union and the United States launched Mars probes but failed to complete their exploration missions [5]. In the 21st century, the United States once again launched the nuclear-powered Mars rover, Curiosity, and obtained comprehensive Mars environmental data. Researchers have discovered the presence of a tenuous atmosphere on Mars, which makes it possible to develop Mars UAVs to assist the Mars rovers in operating within the Martian atmosphere, attracting domestic and international attention from scholars [6][7][6,7].
Currently, the Mars UAVs developed abroad mainly include four types: floating balloons [8], fixed-wing UAVs [9], rotary-wing UAVs [10], and flapping-wing UAVs [11], as shown in Figure 1. The research on floating balloons started early; however, due to the difficulty in controlling them once released and their limited sensing capabilities, they did not receive extensive investigation. Fixed-wing UAVs, such as the ARES [9], can only perform a single flight after being released at high altitudes. Once their energy is depleted they will crash on the Martian surface and cannot be reused. Furthermore, due to the low image resolution, fixed-wing UAVs are not considered an optimal choice for a Mars UAV solution. Flapping-wing UAVs face significant limitations in their flight capabilities on Mars due to the low flight speed of their wings and the extremely low Reynolds numbers involved. These factors make it challenging for flapping-wing UAVs to achieve sustained flight on Mars. Hence, rotary-wing UAVs are positioned as aerial exploration platforms to assist Mars rovers [12][13][12,13], primarily for the following reasons: (1) the high flight speed of UAVs can greatly enhance the speed and efficiency of Mars exploration [14]; (2) the wide-ranging exploration capability of UAVs can expand the exploration range of Mars rovers, avoiding dangerous areas such as sand pits [15]; (3) the local exploration capability of UAVs can enable in-depth research in areas inaccessible to Mars rovers [16]; and (4) the precise landing and exploration capability of UAVs can assist Mars rovers in accomplishing multi-point sampling tasks [17].
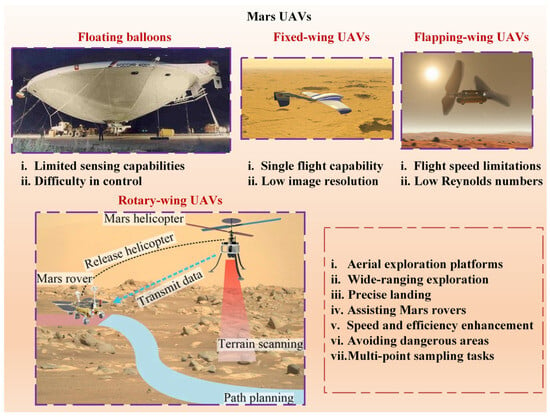
Figure 1.
Classification and characteristics of Mars UAVs.
The harsh Martian environment poses significant challenges for the study of Mars UAV technology. The Martian atmospheric density is only 1/70 that of Earth’s atmosphere, leading to significant effects on the aerodynamic characteristics of UAVs due to low-Reynolds-number flight conditions, including viscous effects and flow separation phenomena [18]. The presence of numerous steep circular mountains on the Martian surface necessitates UAVs to fly at suitable altitudes. The Martian surface is subject to unpredictable Martian winds and dust storms, with wind speeds ranging from 2 to 8 m/s and reaching up to 30 m/s at terrain boundaries [19], requiring UAVs to quickly adjust their attitudes to changing flight environments [20]. There are significant diurnal and seasonal temperature variations on Mars, with average temperatures of 213 K in summer and 153 K in winter [21]. The low temperature reduces the speed of sound on Mars to only 72% of that on Earth, resulting in UAV rotor blades operating at high Mach numbers and being susceptible to air compression effects and shock oscillations [22]. The Martian surface exhibits a diverse topography, with numerous raised circular ramparts, mountains, and canyons, necessitating Mars UAVs to perform takeoff and landing on a complex and ever-changing terrain [23]. A comparison of flight environments between Mars and Earth is shown in Table 1.
Table 1.
Comparison of flight environments between Mars and Earth.
| Environmental Parameter | Mars | Earth | Proportion |
|---|---|---|---|
| Gravitational acceleration (m/s22) | 3.72 | 9.78 | 0.38 |
| Average surface air pressure (Pa) (m/s22) | 640 | 101,300 | 0.0075 |
| Surface atmospheric density (kg/m33) | 0.0167 | 1.22 | 0.014 |
| Average surface temperature (K) | 210 | 288 | 0.73 |
| Specific gas constant (J/g·K) | 0.189 | 0.287 | 0.67 |
| Sound velocity (m/s) | 227 | 320 | 0.72 |
| Dynamic viscosity (kg/m·s) | 1.289 × 10−5−5 | 1.789 × 10−5−5 | 0.72 |
and MRAMS (Martian Regional Atmospheric Modeling System) [32][33][32,33]. The atmospheric models used in foreign Mars missions are presented in Table 2 and Figure 2.
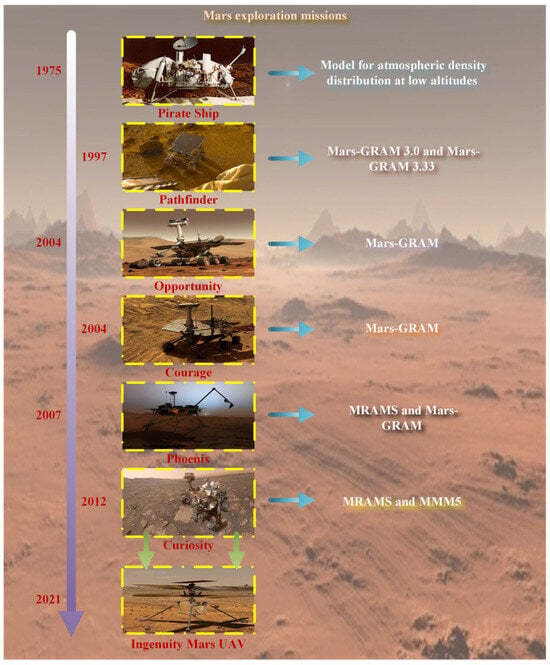
Figure 2. The atmospheric model utilized in the successful Mars missions.
Table 2. Atmospheric models that have been employed in successful Mars missions.
| Detector Name | Atmospheric Model | ||
|---|---|---|---|
| The Pirate Ship | Model for atmospheric density distribution at low altitudes (150 km) | ||
| Pathfinder | Mars-GRAM 3.0 and Mars-GRAM 3.33 | ||
| Scott and Amundsen | Mars-GRAM 3.7 | ||
| Opportunity | Mars-GRAM | ||
| Courage | Mars-GRAM | ||
| Phoenix | MRAMS and Mars-GRAM | ||
| Curiosity | MRAMS and MMM5 | ||
| Atmospheric composition | 95% CO22, 2.7% N22, 1.6% Ar, 0.03% H22O | 78% N22, 21% O22, 1% Ar | – |
This work examines the characteristics and limitations of various UAV designs based on existing research on rotary-wing Mars UAVs. Additionally, it also provides a comprehensive summary of the aerodynamic simulation results, experimental research findings, flight control strategies, and system integration approaches for rotary-wing Mars UAVs. Building upon the current advancements in rotary-wing Mars UAV research, this study investigates the bottlenecks in the development of Mars UAVs.
2. Mars Near-Surface Atmospheric Environment
The Mars surface harbors a thin atmosphere, which enables the development of Mars spacecraft. However, the complex atmospheric conditions greatly impact the operation of Martian spacecraft [24]. Early Mars probes, such as Mars 1 and Mars 2, employed a low-altitude atmospheric density distribution model based on terrestrial ground test data with additional CO22 atmospheric corrections, rather than a genuine atmospheric model derived from actual Martian atmospheric data. Over the years, several Martian atmospheric models have been released internationally. The Committee on Space Research (COSPAR) established the COSPAR model in 1982, primarily based on data from the Mars probes [25]. The COSPAR model provides average, maximum, and minimum atmospheric density values for the Martian northern hemisphere during summer. The Mars Global Reference Atmospheric Model (Mars-GRAM), developed by NASA MSFC, simulates various factors affecting Martian atmospheric parameters [26] and can calculate average and perturbed atmospheric density values for any spatial location and time. This model is continuously updated, with the latest version being Mars-GRAM2010 [27]. The Martian Climate Database (MCD) model [28], a collaborative effort between the Laboratoire de Météorologie Dynamique (LMD), the University of Oxford, and the Andalusian Astrophysics Institute, offers the main atmospheric parameters for any given date and location under given extreme ultraviolet (EUV) radiation and dust storm scenarios. These parameters include atmospheric density, pressure, temperature, Martian dust density, state of Martian dust particles, horizontal and vertical wind speeds, CO22 ice cap thickness, atmospheric turbulence kinetic energy, and heat and solar radiation flux. This model is also subject to continuous updates, with the latest version being MCD5.2 [29]. All the aforementioned models are large-scale Martian atmospheric models. However, due to the increasing precision requirements for landing sites, large-scale models are no longer sufficient. Since 2000, the United States has successively released several medium-scale atmospheric models, such as MMM5 (Mesoscale Model Adapted to Mars) [30][31][30,31]
3. Development of Rotary-Wing Mars UAVs
Currently, in the field of rotary-wing Mars UAV research, numerous scholars have conducted extensive investigations into the following aspects: (i) the feasibility of rotary-wing Mars UAVs’ flight; (ii) the vertical-takeoff-and-landing (VTOL) capabilities of rotary-wing Mars UAVs; (iii) the development of prototypes for rotary-wing Mars UAVs. A summary of the state of research on rotary-wing Mars UAV technologies conducted by various research institutions [34][35][34,35] is provided, as depicted in Figure 3.
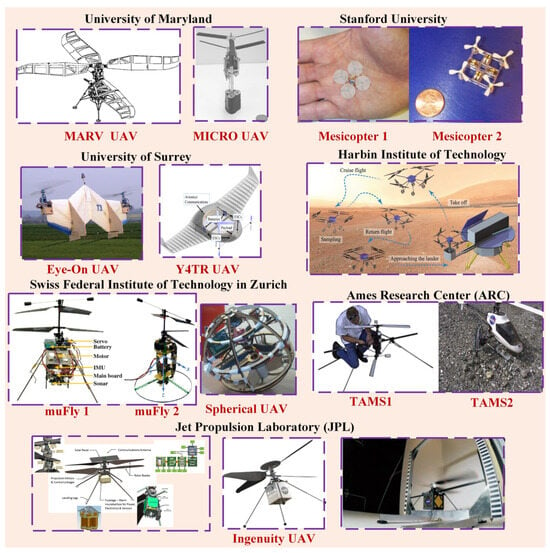
Figure 3.
Rotary-wing Mars UAV prototype compilation.
3.1. The University of Maryland
In the year 2000, the University of Maryland initiated a research project aimed at exploring the feasibility of rotary-wing Mars UAVs in the Martian atmospheric environment [36]. Subsequently, in 2001, they successfully engineered a rotary-wing Mars UAV named MICRO [37]. MICRO demonstrated the capability to hover in a simulated Martian atmospheric environment, equipped with an onboard camera for environmental reconnaissance. Furthermore, this UAV exhibited exceptional flight stability and robustness, enabling it to hover for 20 to 30 min. Notably, the figure of merit (FM) for this UAV reached 0.42. In 2003, the University of Maryland embarked on the design of a larger Mars UAV known as MARV, with a mass of approximately 50 kg. MARV could adjust its attitude in real-time while hovering [38]. In contrast to MICRO’s design paradigm, MARV featured non-viscous, incompressible blade design technology for its rotors, resulting in a low Mach number distribution over the rotor surfaces. This innovative approach ensured exceptional aerodynamic performance of the rotor system, allowing MARV to carry an effective payload of 10.8 kg, achieve a flight range of 25 km, a maximum endurance of 39 min, and maintain stable hovering for 1 min. Subsequently, in 2016, building upon experimental data obtained through rotor hovering tests based on the Ames Research Center (ARC), the University of Maryland conducted ground-based hover flight simulation experiments for rotary-wing Mars UAVs. These experiments factored in various parameters, such as Reynolds number, Mach number, and rotor structure, among others, to assess their impact on the FM of the rotor system. The final experimental results demonstrated that the selection of suitable airfoil profiles and an increase in the Reynolds number could elevate the FM of the rotor system from 0.34 to 0.6 [39], thereby enabling a 0.2 kg rotary-wing Mars UAV to achieve a flight duration of 12 to 13 min in the Martian atmospheric environment.
3.2. Stanford University
In the year 2000, sponsored by the National Aeronautics and Space Administration’s Advanced Concepts Research Institute (NIAC) in the United States, Stanford University researched a rotary-wing Mars UAV, Mesicopter [40]. The Mesicopter UAV had two generations. The prototype of the first-generation Mesicopter had a mass of 3 g and required an external power source for hover flight. In contrast, the prototype of the second-generation Mesicopter weighed 15 g and was powered by a battery. The battery of the second-generation Mesicopter weighed approximately 325 mg, while the control circuitry of the UAV weighed less than 1 g. Subsequently, Stanford University’s research focused on developing sensors, including core components such as magnetometers and gyroscopes, along with their system integration. Furthermore, Stanford University collaborated with Intel Corporation to develop optical fiber and radio-frequency communication equipment suitable for UAVs of this scale.
3.3. University of Surrey
In 2008, the University of Surrey proposed the utilization of rotary-wing UAVs to assist the Mars rover in carrying out certain Mars exploration tasks. They formulated a series of operational strategies for rotary-wing UAVs, enabling them to collaborate with the Mars rover to achieve multi-point sampling on the Martian surface. This was primarily achieved by harnessing the rotary-wing UAV’s hovering and low-speed flight capabilities, as well as its ability to take off and land multiple times, effectively reducing the risk of accidents for the Mars rover in complex and unknown terrain. Simultaneously, the precise landing of the rotary-wing UAV ensured the accuracy of collecting Martian soil samples from predetermined locations. Subsequently, the rotary-wing UAV transported the soil samples to the Mars rover, facilitating the rapid acquisition of Martian soil information [41]. In 2012, the University of Surrey introduced a tilt-rotor UAV named “Eye-On”. This unmanned aircraft, weighing 15 kg, with a rotor span of 1.4 m, boasted a cruising range of up to 100 km and a flight endurance of 38 min. It is noteworthy that Eye-On could independently perform vertical and horizontal flights, exhibiting commendable stability during horizontal flight and ensuring dynamic stability during the transition between vertical and horizontal flight modes [42]. Subsequently, in 2016, the University of Surrey unveiled a next-generation tilt-rotor UAV named “Y4TR”. Y4TR employs nonlinear sliding mode differential Riccati equation (SDRE) control for autonomous cruising. This UAV is equipped with a coaxially counter-rotating rotor system located within the central duct for vertical takeoff, while two sets of single rotors on either side of the UAV are employed for horizontal flight [43]. In comparison to Eye-On, Y4TR possesses a relatively larger mass and requires the use of three rotor systems to generate sufficient lift, resulting in higher energy consumption. Nevertheless, the flight process of Y4TR eliminates the need for complex adjustments between vertical and horizontal orientations.
3.4. Harbin Institute of Technology
Harbin Institute of Technology has extensively researched the key technologies of rotary-wing Mars UAVs. In 2021, they established a Martian Atmospheric Simulator (MAS) simulation system to perform ground experiments related to Martian atmospheric conditions. Additionally, they developed a series of test apparatus to assess the aerodynamic characteristics of rotary-wing systems, aiming to evaluate the flight performance of these systems [44]. Subsequently, they tested the lift-to-drag characteristics of two-dimensional wing profiles for Martian UAV rotary systems and optimized wing shapes suitable for the Martian environment [45]. Furthermore, in 2023, they refined a three-dimensional rotor system tailored for flight in the Martian atmospheric environment [46] and assessed the hovering performance of UAV rotor systems [47]. Moreover, Harbin Institute of Technology has also engaged in comprehensive conceptual design of Martian UAVs [48] and conducted extensive research on the dynamic characteristics and flight control methods of UAVs operating in the Martian environment [49][50][49,50].
3.5. Swiss Federal Institute of Technology in Zurich
In 2010, Swiss Federal Institute of Technology in Zurich (ETH Zurich) initiated the muFly project, intending to develop intelligent micro unmanned aerial vehicles (UAVs) while imposing stringent requirements on the overall size and mass of the UAV. ETH Zurich began by analyzing the mass distribution of the UAV and identified that the mass was primarily concentrated in the actuators (motors, servos) and electronic instruments. Conventional modular design approaches led to a relatively large mass for the UAV’s supporting structure. As a result, the first-generation muFly with a total mass of 95.84 g was developed [51]. Subsequently, ETH Zurich employed high-precision microsensors and structural units for system-level integration, leading to the assembly of integrated structural units, resulting in the compact and highly integrated second-generation muFly, with a total mass of 80.31 g. Throughout this process, there was no increase in the mass of electronic instruments, while the mass of the aircraft’s supporting structure decreased by approximately 77% [52]. Although this approach significantly reduced the overall mass of the UAV, it may have led to a decrease in the structural stability and reliability of the UAV. In 2016, the muFly team embarked on the development of a spherical-structured UAV named the spherical UAV. This UAV adopted the integrated design methodology of the muFly UAV to reduce the mass of the structural components while ensuring overall rigidity and reliability through the spherical structure [53]. This type of UAV exhibited excellent dynamic stability in the vertical direction but exhibited a certain degree of center-of-mass offset during flight.
3.6. The Ames Research Center
In 2001, NASA’s Ames Research Center (ARC) demonstrated the feasibility of utilizing the VTOL capability of rotary-wing UAVs to explore the rugged Martian surface. They proposed key technologies for rotary-wing UAVs, including lightweight structures, innovative propulsion systems, and autonomous flight. Predictions were made regarding the operational duration of UAVs in various weight ranges (10–50 km) [54]. In 2002, based on experimental results of four-blade independent rotors under simulated Martian atmospheric density conditions, the ARC analyzed and optimized the wing shape, chord length, and wingspan parameters of UAV rotors. This optimization improved the aerodynamic performance of the rotors under low-Reynolds-number conditions and led to the development of the TAMS series coaxial-rotor UAVs [55]. In 2005, the ARC explored the feasibility of UAVs with a maximum flight range of 500 kilometers and a maximum total mass of 2500 km [56]. Ultimately, they determined that releasing a small rotary-wing UAV through a Mars lander would be more meaningful to assist in exploration missions. This prediction considered conditions where the Reynolds number of UAV flight was less than 8 × 1055 and the Mach number was less than 0.7 [57]. In the same year, the ARC collaborated with the Langley Research Center to develop a series of deployment strategies for UAVs on Mars. Extensive research was conducted on various aspects of Martian UAVs, including maximum lift, total mass, power source, mechanical efficiency, autonomous flight capability, reliability, and hover performance, among others [34].
3.7. The Jet Propulsion Laboratory
In 2004, the Jet Propulsion Laboratory (JPL) carried out an extensive investigation into the feasibility, aerodynamic characteristics, and hovering capabilities of rotary-wing Mars UAVs. This study involved a comparative analysis of flight principles, structural configurations, and adaptability across various types of Mars UAVs, with rotorcraft UAV-type Mars UAVs being recognized as a significant focus in Mars UAV research [58]. Subsequently, JPL collaborated with academic institutions such as the University of Maryland and the Georgia Institute of Technology to conduct in-depth research on rotorcraft UAV-type Mars UAV technology. The plan was to deploy the Mars UAV alongside Mars rovers in 2020 to aid in environmental exploration [59]. In 2015, the official website of JPL introduced the conceptual prototype of the Mars UAV [60]. This compact coaxial rotorcraft UAV-type Mars UAV possessed a mass of approximately 1 kg and a wingspan measuring 1.1 m. The lower section of the fuselage integrated systems and equipment including controllers, communication instruments, measurement and control devices, and power supplies within a storage compartment [61]. This integration significantly reduced the UAV’s mass, enabling it to perform flight maneuvers such as takeoff, hovering, maneuvering, and landing in a simulated Martian atmospheric environment. Currently, JPL is in the process of devising the control scheme for the UAV’s reconnaissance mission and conducting research on crucial parameters like payload capacity, endurance, and hover duration [62].
The conceptual prototype of the Mars UAV was unveiled on JPL’s official website in 2015. This small-scale coaxial-rotor Mars UAV can execute flight maneuvers such as takeoff, hovering, maneuvering, and landing within simulated Martian atmospheric conditions. In 2018, JPL, in collaboration with other research institutions, carried out thorough design and validation of the rotor system, main structure, avionics system, sensor payload, landing system, communication system, power system, and thermal control system for the rotary-wing Mars UAV of JPL. The intention was to launch it to Mars in 2020, alongside a rover [63]. In April 2019, the name "Ingenuity" was officially bestowed upon the Mars UAV in the United States [64][65][64,65]. The inaugural flight test of Ingenuity on Mars was successfully executed on 19 April 2021. This marked the first controlled flight ever achieved on another planet in human history, and it has been operational on Mars for one year [66]. Note that there are also open competitions for Mars UAVs, typically involving student groups, as detailed in [67], which are not elaborated upon within the scope of this work. The relevant parameters of the Mars unmanned aerial vehicles developed by various research institutions are shown in Table 3.
Table 3.
Mars UAV proposal and parameters.
| UAV Name | Institution | Wingspan | Total Mass | Propulsion System | Power Source | Endurance | Year |
|---|---|---|---|---|---|---|---|
| MICOR | Maryland | 15.24 cm | 103 g | Battery driven | LiMnO22 cells | 5 min | 2001 |
| MARV | Maryland | 4.266 m | 50 kg | BLDC motor | PEM fuel cells | 39 min | 2003 |
| Mesicopter 1 | Stanford | – | 3 g | – | – | – | 2000 |
| Mesicopter 2 | Stanford | – | 15 g | – | – | – | 2000 |
| Eye-On | Surrey | 1.4 m | 15 kg | Twin rotor | LiPo cells | 38 min | 2012 |
| Y4TR | Surrey | 1.0 m | 25 kg | – | – | 60 min | 2016 |
| muFly 1 | ETH Zurich | 15.0 cm | 95.84 g | BLDC motors | LiPo cells | – | 2010 |
| muFly 2 | ETH Zurich | 15.0 cm | 80.31 g | BLDC motors | LiPo cells | – | 2011 |
| Spherical UAV | ETH Zurich | 22.6 cm | 0.59 kg | Contra-rotating motor | 1300 mAh cell | – | 2016 |
| TAMS 1 | ARC | 0.982 m | 3.5 kg | – | – | 6 min | 2002 |
| TAMS 2 | ARC | 1.250 m | 4.6 kg | – | – | 6 min | 2002 |
| Ingenuity | JPL | 1.2 m | 1.8 kg | BLDC motor | Li-Ion cells | 2 min | 2021 |