Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 2 by Camila Xu and Version 1 by Tomás de J. Mateo Sanguino.
Electric vehicles (EVs) are a transport mode that uses an electric motor. That is, EVs are all types of cars that can be powered partly or fully by electricity. The first autonomous vehicles (AVs) concept was introduced by the Detroit-based American carmaker General Motors (Detroit, MI, USA) in 1939. The initial phase of research and development was jointly initiated by General Motors and the Radio Corporation of America Sarnoff Laboratory (New York, NY, USA) in the 1950s.
- electric and autonomous vehicles
- environmental protection
- carbon emissions
1. Introduction
Today’s level of development in science and technology is on the way to enabling the development of a motor vehicle that would satisfy most mobility needs, save energy, protect the environment, and in general meet societal needs with increased automation and, eventually, full autonomy in all conditions of use. It can be said that today marks a major expansion of the automotive industry since the emergence of motor vehicles. Motor vehicle manufacturers are obliged by law to accept responsibility for all phases of the life cycle of motor vehicles (i.e., from their development to the demise of products on the market) in terms of environmental protection and sustainable development. Life cycle assessment is a standardized method to assess environmental impacts [1].
Ultimately, in order to avoid energy and environmental problems today and in the future, new technologies for motor vehicle production focus on the production of automobiles, and they are also facilitated through electric and autonomous vehicles. The deployment of electric vehicles is a potential way to decarbonize road networks, and at the same time, it may offer wider benefits for the environment, such as reducing air pollution and noise in urban areas. A lot of countries have now published their own plans for promoting the uptake of electric vehicles (EVs) and subsequently implemented monetary and non-monetary policies, including subsidies and tax exemptions, for EV owners and deployed charging infrastructure [2]. Also, EVs are gaining momentum due to several factors, including a gradual price reduction, as well as climate and environmental awareness [3]. In particular, to reduce the dependence on oil and environmental pollution, the development of EVs has been accelerated in many countries in an effort to build green cities with low carbon footprints [4,5][4][5]. The implementation of new technologies, such as the additive manufacturing of parts (i.e., 3D printing) for EVs/AVs using recyclable materials is also the latest approach in the manufacturing process, from prototyping to even printing entire vehicles, which leads to a long list of benefits, such as vehicle delivery speed, customization, and cost-effectiveness [6].
2. Technological Development of EVs and AVs
2.1. Electric Vehicles: Past, Present, and Future
EVs are a transport mode that uses an electric motor. That is, EVs are all types of cars that can be powered partly or fully by electricity [2,4,8][2][4][7]. EVs and their application have been actual topics of interest since the appearance of vehicles, but problems with batteries, electric motors, and the conversion of electrical energy that powers those motors, along with cheaper fuel for diesel and gasoline engines that have advanced technically, have led to a situation in which the use and development of electric vehicles have not been of interest for a long time [9][8]. At the beginning of the 20th century, the popularity of motor vehicles grew rapidly, and the battle for the future of mobility began. During this period, the manufacturers of electric vehicles also worked successfully, but after the first decade of the 20th century and until the oil crisis of 1970, the production of electric vehicles made little progress. After 1970, the most significant shift in the production of vehicles that also have an electric motor alongside their internal combustion engine was made by the Toyota car factory in Japan with its Prius vehicle model. Thus, the Toyota Prius was introduced in Japan (1997) and was the first mass-produced hybrid electric vehicle in the world [10,11][9][10]. The renaissance of next-generation EVs began in the 21st century. In the first years of the 21st century, the automobile and electric power company Tesla Motors, based in Palo Alto, CA, USA, the Nissan car factory in Japan, and some Chinese car companies stood out in the production of EVs.2.2. Autonomous Vehicles: Past, Present, and Future
The first AV concept was introduced by the Detroit-based American carmaker General Motors (Detroit, MI, USA) in 1939. The initial phase of research and development was jointly initiated by General Motors and the Radio Corporation of America Sarnoff Laboratory (New York, NY, USA) in the 1950s. In the period from 1964 to 2003, several research and development programs were organized that were operational in the United States, Europe, and Japan as part of individual and joint initiatives of various government institutes and academics to develop automated systems for buses and trucks, super smart vehicle systems, and video processing to recognize driving situations [13][11]. During the 1960s, Ohio State University developed a driverless vehicle controlled via electronic devices integrated into the road surface, while in the 1970s, the American manufacturing and engineering company Bendix Corporation (Avon, OH, USA) launched and tested the first driverless vehicle, which was controlled using cables integrated into the road surface, with the help of road communicators, for the purpose of receiving and sending digital and analog information to the computer unit in the vehicle. In the 1980s, the German vehicle manufacturer Mercedes-Benz introduced its version of a robot-controlled vehicle. The vehicle was designed by Ernst Dickmanns and his team from Bundeswehr University Munich in Germany. Following this project, the European Commission started funding the Eureka project “PROMETHEUS—Programme for European Traffic with Highest Efficiency and Unprecedented Safety” on AVs for €749 million in the period from 1986 to 1994 [14][12]. In the same decade, a group of American universities in cooperation with the USA, the “Defense Advanced Research Projects Agency”, and the American Non-Profit Research Institute developed AVs. At that time, lidar technology was used and tested for the first time (i.e., system management technology using computer vision and robotics). Carnegie Mellon University in the USA has developed a so-called neural network for the control of AVs. In 1994, the German vehicle manufacturer Mercedes-Benz, in cooperation with the Bundeswehr University Munich in Germany, developed a semi-autonomous vehicle [15][13]. A year later (1995), researchers at Carnegie Mellon University marketed the vehicle with 98.2% autonomy, which was a remarkable step forward in the development of AVs. Using neural network technology, this solution enabled the vehicle to be operated without the use of the hands, but it was still conditioned by human mediation in the process of braking the vehicle. At the end of the last century (1998), the Toyota car factory in Japan offered solutions for speed control systems and maintaining their constancy, and a little later (2009), Google began research on driving a vehicle without the human factor. Today, significant contributions to the development and application of AVs are made by Waymo Google, Uber, Tesla, Renault, Toyota, Audi, Volvo, Mercedes-Benz, General Motors, Nissan, Bosch, and Continental’s autonomous vehicles, etc. The first classification of AVs was developed by the National Traffic Safety Administration—NHTSA (2013)—which defined five levels of autonomy. Also, the Society of Automotive Engineers International—SAE (2014)—published a classification of autonomous vehicles at six levels, called the SAE J3016: JAN2014 standard. This standard was amended in 2016 and was published under the name of the SAE J3016: SEP2016 standard. In 2016, SAE and NHTSA provided an official classification of vehicles according to their degree of autonomy and placed them in six levels. A description of these vehicle autonomy levels is provided in Figure 1.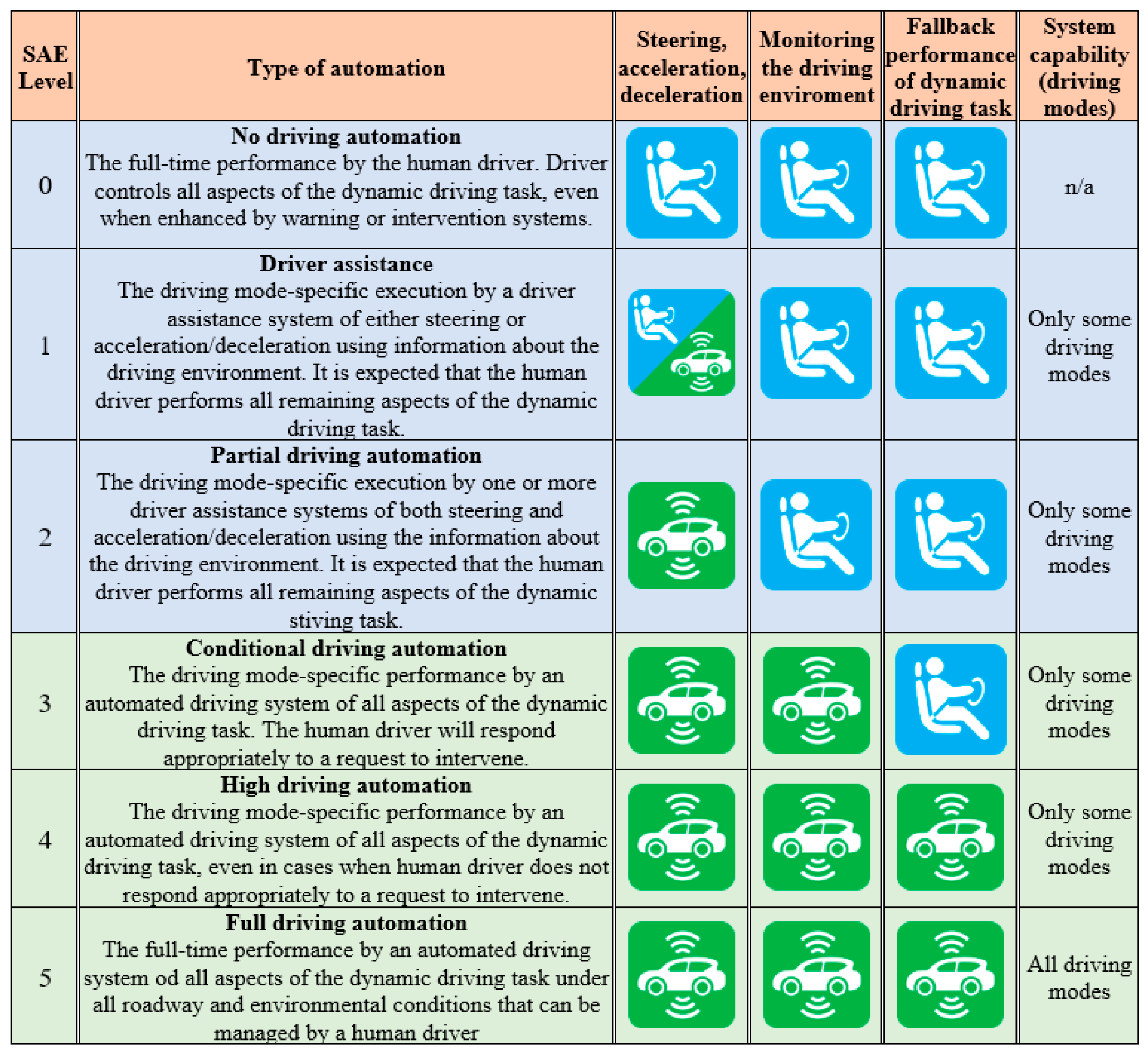
2.3. Technological Overview of Electric Vehicles
In battery electric vehicles (BEVs), the total electricity is provided by a battery. There is no fuel tank for the storage of fuel, so a BEV is also called a “pure electric vehicle”. It consists of a large, rechargeable battery that does not release harmful toxic gas to the environment, but consumers assume that it creates high pollution levels during the generation of electricity, the manufacturing of batteries, and the dumping of discarded batteries [19][17]. The performance of a BEV is totally dependent on its battery capacity and its thermal management system. Battery temperature plays a crucial role in governing the performance of the battery and its lifespan. In a BEV, electrical energy is converted to mechanical energy with minimum conversion losses. Vehicle charging times vary with the capacity of the battery, charging scheme, and series/parallel connection used. To increase the distance covered and capabilities, upgraded versions of HEVs, PHEVs, and others have been introduced [20][18]. The types of electric vehicles are presented in Figure 2 [4,10][4][9].
Figure 2.
EVs’ powertrain architecture types.
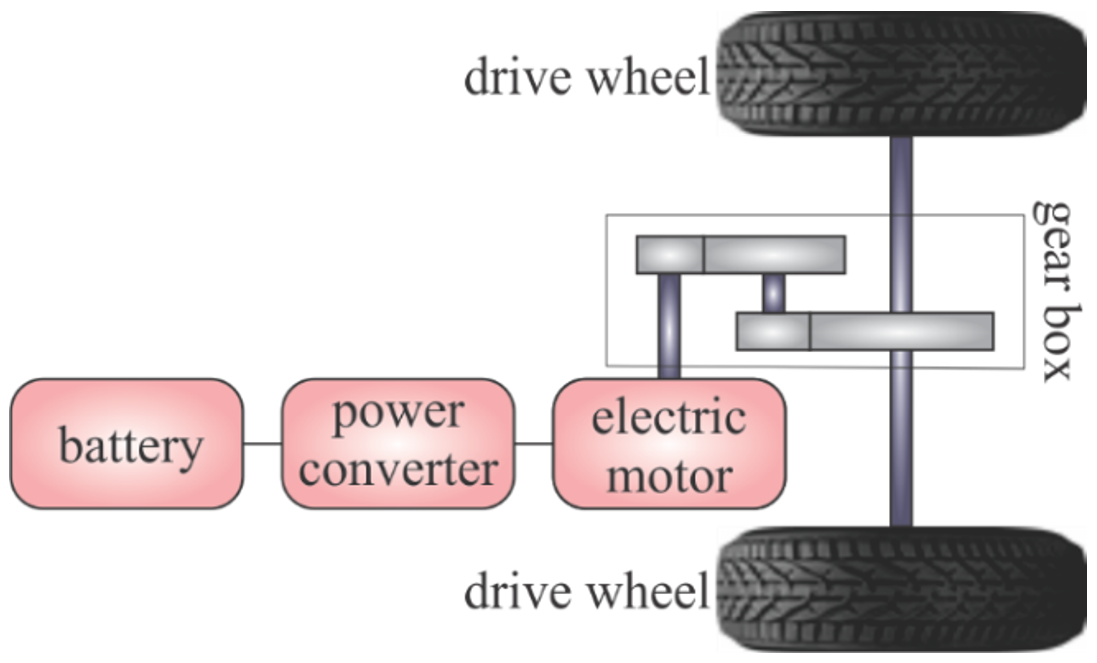
Figure 3.
Illustration of a BEV/EV drive.
2.4. Technological Overview of Autonomous Vehicles
Vehicle automation and communication technologies are considered promising approaches to improve operational driving behavior [26][24]. Currently, the AV is undergoing one of its most promising periods in recent years. Areas as diverse as 3D printing, artificial intelligence, laser sensors, cameras, radar, communications, and even the detection and improvement of driver behavior are being developed collectively to improve driving, both in terms of safety and pollution reduction [27][25]. In simple terms, this means that a vehicle system is composed of various internet and communication technologies such as in-vehicle networking, wireless communications such as 4G/LTE, 5G, 802.11x, and Bluetooth that enable internet access, including cloud and V2X (vehicle-to-everything) communications such as vehicle-to-vehicle (V2V), vehicle-to-pedestrian (V2P), vehicle-to-devices (V2D), vehicle-to-grid (V2G), and vehicle-to-infrastructure (V2I) [28][26]. Thus, AVs are based on advanced sensors that can collect information about the environment via deep multilayer neural networks, which are used to identify streets, vehicles, objects, and people using data collected from vehicle control sensors. All this is achieved with great computing power, which processes information and converts it into effective commands in real time. The sensor sets on AVs (cameras, lidars, radars, etc.) complement each other and compensate for any weaknesses of any sensor used, as Figure 4 shows.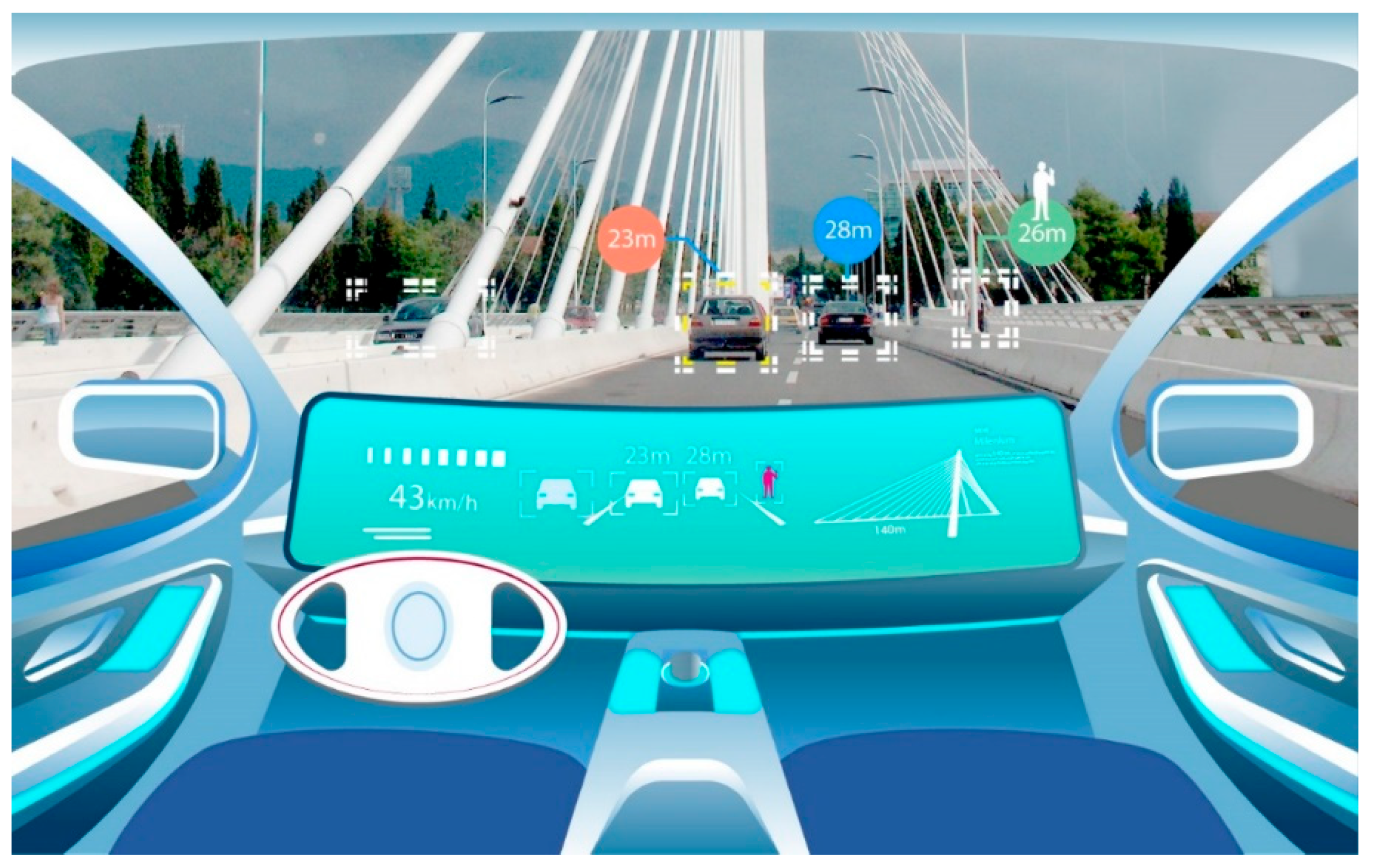
Figure 4.
Simulation of AV movement in Podgorica (Montenegro).
- -
-
Environment perception and modeling;
- -
-
Map positioning and construction;
- -
-
Vehicle path and movement planning and control;
- -
-
System monitoring.
2.5. Differences between EVs/AVs and Conventional Vehicles
EVs/AVs offer several advantages over conventional vehicles (CVs) that use petrol or diesel, especially when it comes to emissions, noise emissions, non-renewable energy consumption, and maintenance costs. Nevertheless, intelligent vehicles are equipped with advanced sensors, controllers, and actuators in combination with connecting communication technologies compared with CVs, for which the energy will definitely increase [39][37]. On the contrary, EVs/AVs cause zero emissions during operation. Certainly, when it comes to the stopping phase, they also emit particles from tires and the friction elements of the braking system. The production of EVs’/AVs’ batteries and their subsequent disposal after decommissioning pollute the environment, but this pollution is easier to control in relation to the emission of harmful substances from CVs. The complete supply chain of CVs with petrol or diesel pollutes the environment. EVs’/AVs‘ and CVs’ powertrains are fundamentally different, and due to their external characteristics (i.e., depending on the torque and/or power of the output shaft on the number of revolutions), electric motors are more practical to use. This results in EVs/AVs‘ utilizing over 85% of the energy invested in their operation. To start CVs, it is necessary to ensure the start of the internal combustion engine with a low speed and low torque on the engine’s flywheel. Unlike CVs, high torque can be transmitted to the motor shaft at start-up for EVs/AVs. Because of this, EVs/AVs do not need a mechanical power transmission to change gears. EVs/AVs in the braking phase can accumulate (recover) energy. The recovery of energy is especially noticeable when moving on sections of the road that are falling and the brake is often used, and also in city driving, because the start-stop phases are often changed. CVs are more convenient to use than EVs/AVs when it comes to the radius of movement. EVs/AVs still have a limited range and depend primarily on battery capacity. Due to the large presence of electronics within the vehicle, EVs/AVs have significantly higher energy consumption compared to CVs [40][38]. With the level of vehicle autonomy, the carbon footprint increases [39][37].2.6. Carbon Footprint of the Additional Hardware of EVs and AVs
The comfort and safety elements of classic vehicles have a great impact on carbon footprints and, therefore, on the economy. To measure their implication, it must be considered that 100 watts typically corresponds to fuel consumption of 0.1 L every 100 km. For a journey time of 1 h, the power consumption is equivalent to 100 Wh, and the carbon footprint (carbon footprint vs. power consumption, available at www.ceroco2.org/calculadoras/ (accessed on 7 November 2023)) is 0.03 kg of CO2 emitted into the atmosphere. Taking as a reference the annual average price of CO2 emission rights according to the European Trading Scheme (European CO2 trading system, available at www.sendeco2.com/es/ (accessed on 7 November 2023)) (ETS), this equates to a monetary cost of ~2.44€ (81.34€, according to the spot price calculated on 15 September 2023 using EU allocations). In this sense, Table 1 shows the carbon footprint of some typical components aboard traditional vehicles.][39]. The latest cars equipped with cameras and radars typically generate ~12 GB of data every minute. Processing these images requires a lot of computing power, whose consumption can reach around 2500 watts in some prototypes, enough to power 40 incandescent light bulbs. From Table 4, this results in 750 g of CO2 emissions with a cost of 61.00€ every 100 km. As another example, the GM Cruise AV is equipped with 5 lidars, 16 cameras, and 21 radars. This results in ~7200 watts or 2.15 Kg of CO2 emissions with a cost of 174.88€ every 100 km.Table 1.Carbon footprints of some typical components aboard classic vehicles.Component Consumption (Wh) Carbon Footprint (CO2 g/km) Cost (€) Vehicle Battery Pack Total Energy (kWh) Consumption
(kWh/100 km)Autonomy (h) Carbon Footprint
(CO2 g/km)4.80 Nissan LEAF 2.07 Table 3.Carbon footprints of some typical components aboard modern vehicles.Component Consumption (Wh) Carbon Footprint (CO Cost (€) 2 g/km) Cost (€) Automation Function Connection Function Other Factors (e.g., Hardware Quality) Carbon Footprint
(CO2 g/km)Cost (€) Heated windscreens 120 32 2.60 BMW i3 96 Li-ion cells 22 12.34 Camera 1.78 59 Windscreen wipers 80–150 20–40 192 Li-ion cells 241.63–3.25 17.2 1.4 54 4.40 0.07 Radar(middle distance) Basic 80% 15% 5% 234 4.5 1.35 0.11 LED lights 50 10 0.81 Volvo C30 384 Li-ion cells 24 9.47 2.53 120 Radar(long distance) 6.25 9.76 Heater 170 40 19.95 Intermediate 73% 1.875 0.15 3.25 Mini Cooper SE 192 Li-ion cells 20% 7% Lidar (32 lines) 12.1 3.63 0.29 Seat heaters 100–200 30–50 2.44–4.07 Air conditioning 500 130 10.57 Sunroof Lidar (64 lines) 60 18 200 50 4.07 Power windows 150 40 3.25 Plug socket 50 10 0.81 Radiator fan 800 200 16.26 Engine controller 200 50 4.07 Headlight cleaning 100 30 2.44 Table 2 shows the battery packs used in current EVs and the impact of power consumption on autonomy and carbon footprints. Note that CO2 emissions are measured in grams per every 100 km traveled, according to the EU Energy Label.Modern EV/CVs are considered networks on wheels—in practice—as they are more connected to the internet, whose evolution of AVs will make them true data centers on the road [39][37]. While PC gaming and smartphones currently increase RAM memory by up to 16 GB and 18 GB, respectively, the resource requirements of vehicles to meet Level 3 driving capabilities in 2022 were expected to reach 140 GB of RAM and 1 TB of internal storage. The consequence was that advanced driver assistance systems (ADAS) consume a considerable amount of energy and put a strain on batteries. For further analysis, Table 3 shows the carbon footprint of some typical components aboard modern vehicles [41Table 2.Carbon footprints of the current main EVs.Tesla Model S 7104 Li-ion cells 85 18.1 4.59 26 2.12 3 0.9 0.15 MIMO RF module 1 0.3 0.024 Gateway 36 10.8 0.88 Display 60 18 1.46 Head-up display 8 2.4 0.20 Attention retention system 24 7.2 0.59 Face recognition 2.25 0.675 0.05 Gesture recognition 2 0.6 0.05 Eye movement recognition 1.5 0.45 0.04 NFC communication 2 0.6 0.05 Wireless charger 10 3 0.24 According to a study [41][39], it can be inferred that an average intelligence level dramatically increases the carbon footprint to 468 g of CO2 every 100 km (i.e., 38.07€). Similarly, the carbon footprint of a basic intelligence car increases by 780 watts/100 km compared with classic vehicles, whilst the footprint of an advanced intelligence car increases by 1860 watts/100 km. In sum, the carbon footprint increases as the autonomous driving capability increases, with the automation function being the main cause and the connection function being the second one (Table 4). Hopefully, the future will be promising, and manufacturers such as, e.g., Nvidia, Intel, Qualcomm, and Tesla, are directing their efforts to decrease the size of in-vehicle electronics and reduce massive electrical consumption by developing low-power chips optimized for AVs. For example, Nvidia has designed a new processor called Xavier based on an octa-core CPU, a 512-core GPU, a deep learning accelerator, computer vision accelerators, and 8 K video processors with just 30 watts. Thus, fully autonomous driving could be a reality with only two processors and two dedicated GPUs—to ensure vehicle safety through the redundancy of the computing platform—with an acceptable power consumption of 500 watts and 150 g of CO2 emissions every 100 km [40][38]. Moreover, there is also a significant demand for solutions to move the intelligence aboard vehicles to remote intelligence in cloud computing systems. Remote intelligence will increase the management of AVs and their systems, increase computing capacity without requiring excessive hardware growth in cars, dramatically reduce the cost of on-board electronics and their carbon footprint, as well as allow greater synergy between the system control functions and online services. Addressing latency challenges is among the current priorities of both researchers and manufacturers. To this end, manufacturers are currently investigating distributed platforms for automotive services with real-time cloud access, thus making vehicles part of an intelligent transportation system (ITS) [42][40]. This is the case of REMOTIS, a remote intelligence system for cars capable of connecting to a server and transferring all the information from their sensors to carry out critical driving functions remotely through a 5G infrastructure (https://www.youtube.com/watch?v=uQk1kljyXZ4 (accessed on 7 November 2023)).Table 4.Carbon footprints at different levels of intelligence.Level 468 39.89 32.6 15.5 Advanced 2.10 45 3.65 Mercedes B-Class 3696 NCA cells 36 16.6 2.17 146 11.88 1.46 Toyota RAV4 4500 Li-ion cells 41.8 16.6 2.52 103 8.37 Ultrasonic sensor 0.13 0.039 0.003 Renault Zoe 192 Li-ion cells 52 17.7 2.94 43.88 3.56 61% 33% 6% 558 47.56 GNSS positioning and inertial navigation 3.9 1.17 0.09 BYD E6 LiFePO4 cells 61.4 19.5 Processor 500 150 12.20 3.15 N/A N/A Hyundai Ioniq 5 384 Li-ion cells 72.6 V2X chip 6 16.8 4.32 63 5.13 1.8 Kia EV6 384 Li-ion cells 72.6 20 3.63 63 5.13 Mercedes EQC 384 Li-ion cells 70 22.2 3.15 25.5 2.7. Implementation of Additive Manufacturing in EVs/AVs
A very important part of creating harmony between the accelerated technological development of EVs/AVs and the environment is the implementation of additive manufacturing (AM) and the usage of recyclable materials in 3D-printed automotive parts. AM, popularly called 3D printing, is the process of building a physical object using modeling data, and it represents one of the most revolutionary technologies of this era. The first idea connected to creating this technology came from the last century and was based on the simultaneous photography of an object from different angles using 24 cameras while making a 3D model [43][41]. This technology has facilitated the classical mass production of 3D-printed items and parts, a process that encompasses product design, involving iterative collaboration between production engineers and designers, optimization, production analysis, printing modules, post-production, and more [44][42]. The benefit of additive manufacturing compared to classical manufacturing is that it applies a trial-and-error technique, which allows a designer to print a model and use it in practice without suffering any losses (other than filament losses). If a model does not operate as expected, the designer can make any necessary corrections until it performs all the desired functions. The most important implementation of 3D printing has been in the areas of automotive manufacturing, medicine, architecture, art, design, and lately, even food [45][43]. Moreover, due to advances in 3D printer technology, the market for 3D printing has recently experienced some of the manufacturing sector’s fastest growth. Especially after the outbreak of the COVID-19 pandemic, the 3D printing of protective equipment (e.g., face shields, masks, and bracelets) was essential for the whole world, and both freelancers and academics did their best to design such equipment [46,47][44][45]. In 2009, the company MakerBot produced so-called “desktop” 3D printers, which were used for people to perform 3D modeling and printing at home [48][46]. Today, MakerBot’s printer is sold as a kit that users assemble into a finished printer. The MakerBot company also created the first online library (i.e., Thingiverse) where files that can be 3D-printed and downloaded for EVs/AVs can also be found, and which is becoming the largest online community in the world concerning 3D printing [49][47]. Today, there are several types of 3D printing machines or techniques, depending on the size, complexity, and scale of the product. The way an object is produced differs, depending on the type of printer used. There are many types of 3D printers, and their classification can be achieved according to several criteria: technology, materials, and purposes [50][48]. To produce EVs/AVs, industrial 3D printers are mainly used and specifically designed for these applications. While price is an important factor, the real key differentiators are the specifications, performance, features, and functions offered by each industrial 3D printer, such as the following: the ability to work with materials of high performance and engineering quality; the possession of a large, actively heated chamber for building objects; a high printing speed, which equals high productivity; precision and the accuracy of dimensions; repeatability and reproducibility; operator safety, monitoring and productivity; and an open platform with certified materials. According to a report from 2017 with the greatest emphasis on the analysis of countries in Europe and their users, the most commonly used materials for 3D printing are still polymer-based (plastic materials)—as much as 88% [51][49]. Resin is the second-most-used material with characteristics of high resistance and strength. Of the metal materials that are in third place, both pure metal powders and alloys are used, most often stainless steel and alloys of aluminum, chromium, cobalt, nickel, etc. Apart from the mentioned materials, various types of ceramic powders based on zinc or aluminum can be used, then come powders based on gypsum, cellulose, various types of sand powders, biocompatible powders, etc. Precisely in the last few years has the increasing consumption of these materials has been observed [52][50]. The automotive industry is the fastest-growing vertical using AM; therefore, the EV/AV market represents a great fit for AM as a production process. Many companies, instead of traditional plastic-injection-molding processes, choose cost-effective 3D printing processes, especially if they need fewer than 50,000 parts a year. Nowadays, manufacturers face low production volumes and highly uncertain demand. That is why automakers ranging from Ford and Volkswagen, along with startups such as Arash Motor Co. and Rivian, are investing highly in AM technology. The adoption of 3D printing in EV/AV manufacturing processes offers a multifaceted approach to environmental sustainability, including circular economy principles and energy optimization. For instance, 3D printing has potential in the circular economy of plastic components at the end of the lives of vehicles, offering opportunities for recycling and the decentralization of supply chains [53][51]. Additionally, 3D printing has demonstrated substantial energy savings through selective laser sintering (SLS) in the automotive and aircraft industries [54][52]. Other factors attributable to 3D printing in the broader industry (e.g., material efficiency, lightweighting, and customization or localized production) may also contribute to reducing the carbon footprint associated with the manufacturing processes of EVs/AVs, fostering environmental sustainability while enhancing economic viability. On average, EVs/AVs could incorporate between 50 and 200 3D-printed parts (e.g., interior components, support parts, and prototype/tests, as well as custom components for sensor systems and autonomous technology). When the average values from Table 5 are employed, the cumulative effect suggests an overall conservative reduction of approximately 60% in the carbon footprint. This assessment serves as a simplified estimation, and real-world impacts may significantly fluctuate, contingent upon the circumstances of each production process and vehicle model (i.e., more advanced and customized vehicles may have a greater number of 3D-printed parts, while more conventional models may have fewer). Furthermore, continued advancements in technology and materials hold the potential to further amplify these benefits over time.Table 5.Estimation of carbon footprint reduction through 3D printing in EVs/AVs.
| Factor | Material Efficiency | Lightweighting | Customization | Local Production | Recycling and Circular Economy | Energy Efficiency |
|---|---|---|---|---|---|---|
| Moderate | 20% | 10% | 5% | 15% | 5% | 5% |
| Aggressive | 30% | 15% | 10% | 20% | 5% | 10% |
References
- Syré, A.M.; Heining, F.; Göhlich, D. Method for a Multi-Vehicle, Simulation-Based life Cycle Assessment and Application to Berlin’s Motorized Individual Transport. Sustainability 2020, 12, 7302.
- Song, R.; Potoglou, D. Are Existing Battery Electric Vehicles Adoption Studies Able to Inform Policy? A Review for Policymakers. Sustainability 2020, 12, 6494.
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404.
- Sun, X.; Li, Z.; Wang, X.; Li, C. Technology Development of Electric Vehicle: A Review. Energies 2019, 13, 90.
- Khan, Z.A.; Sherazi, H.H.R.; Ali, M.; Imran, A.M.; Rehman, I.U.; Chakrabarti, P. Designing a Wind Energy Harvester for Connected Vehicles in Green Cities. Energies 2021, 14, 5408.
- Redwood, B.; Schöffer, F.; Garret, B. The 3D Printing Handbook: Technologies, Design and Applications; 3D Hubs: Amsterdam, The Netherlands, 2017; 304p, ISBN 978-9082748505.
- Rezvani, Z.; Jansson, J.; Bodin, J. Advances in consumer electric vehicle adoption research: A review and research agenda. Transp. Res. Part D Transp. Environ. 2015, 34, 122–136.
- Niestadt, M.; Bjørnåvold, A. Electric Road Vehicles in the European Union—Trends, Impacts and Policies; EPRS-European Parliamentary Research Service: Brussels, Belgium, 2019.
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.N.; Hossain, E. A Comprehensive Study of Key Electric Vehicle (EV) Components, Technologies, Challenges, Impacts, and Future Direction of Development. Energies 2017, 10, 1217.
- Shim, S.W.; Miller, A.; Marsh, A. The Emergence of New Types of Powertrain and the Impact on the Insurance Industry; Motor Insurance Repair Research Centre Thatcham: Thatcham, UK, 2009.
- Shladover, S.E. Connected and automated vehicle systems. J. Intell. Transp. Syst. Technol. Plan. Oper. 2018, 22, 190–200.
- Available online: https://www.autoevolution.com/news/a-short-history-of-mercedes-benz-autonomous-driving-technology-68148.html (accessed on 7 November 2023).
- Raviteja, T.; Vedaraj, I.S.R. An Introduction of Autonomous Vehicles and a Brief Survey. J. Crit. Rev. 2020, 7, 196–202.
- Bučko, B.; Michálek, M.; Papierniková, K.; Zábovská, K. Smart Mobility and Aspects of Vehicle-to-Infrastructure: A Data Viewpoint. Appl. Sci. 2021, 11, 10514.
- Padmaja, B.; Moorthy, C.H.V.N.S.N.; Venkateswarulu, N.; Bala, M.M. Exploration of issues, challenges and latest developments in autonomous cars. Springer Open J. Big Data 2023, 10, 61.
- Kosuru, V.S.R.; Venkitaraman, A.K. Advancements and challenges in achieving fully autonomous self-driving vehicles. World J. Adv. Res. Rev. 2023, 18, 161–167.
- Qin, N. Electric Vehicle Arhitectures; EV and Technology Workshop, Electric Vehicle Transportation Center, University of Central Florida: Orlando, FL, USA, 2016.
- Li, W.; Long, R.; Chen, H.; Geng, J. A review of factors influencing consumer intentions to adopt battery electric vehicles. Renew. Sustain. Energy Rev. 2017, 78, 318–328.
- Verma, S.; Mishra, S.; Gaur, A.; Chowdhury, S.; Mohapatra, S.; Dwivedi, G.; Verma, P. A comprehensive review on energy storage in hybrid electric vehicle. J. Traffic Transp. Eng. 2021, 8, 621–637.
- Salmasi, F.R. Control Strategies for Hybrid Electric Vehicles: Evolution, Classification, Comparison, and Future Trends. IEEE Trans. Veh. Technol. 2007, 56, 2393–2404.
- Waraich, R.A.; Galus, M.D.; Dobler, C.; Balmer, M.; Andersson, G.; Axhausen, K.W. Plug-in hybrid electric vehicles and smart grids: Investigations based on a microsimulation. Transp. Res. Part C Emerg. Technol. 2013, 28, 74–86.
- Tani, A.; Camara, M.B.; Dakyo, B.; Azzouz, Y. DC/DC and DC/AC Converters Control for Hybrid Electric Vehicles Energy Management-Ultracapacitors and Fuel Cell. IEEE Trans. Ind. Inform. 2013, 9, 686–696.
- Hannan, M.A.; Lipu, M.S.H.; Hussain, A.; Mohamed, A. A review of lithium-ion battery state of charge estimation and management system in electric vehicle applications: Challenges and recommendations. Renew. Sustain. Energy Rev. 2017, 78, 834–854.
- Nykvist, B.; Nilsson, M. Rapidly falling costs of battery packs for electric vehicles. Nat. Clim. Chang. 2015, 5, 329–332.
- Al-Turki, M.; Ratrout, N.T.; Rahman, S.M.; Reza, I. Impacts of Autonomous Vehicles on Traffic Flow Characteristics under Mixed Traffic Environment: Future Perspectives. Sustainability 2021, 13, 11052.
- Lozano Domínguez, J.M.; Mateo Sanguino, T.J. Review on V2X, I2X, and P2X Communications and Their Applications: Comprehensive Analysis over Time. Sensors 2019, 19, 2756.
- Shon, T. In-Vehicle Networking/Autonomous Vehicle Security for Internet of Things/Vehicles. Electronics 2021, 10, 637.
- Zhu, H.; Yuen, K.; Mihaylova, L.; Leung, H. Overview of environment perception for intelligent vehicles. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2584–2601.
- Velasco-Hernandez, G.; Yeong, D.J.; Barry, J.; Walsh, J. Autonomous Driving Architectures, Perception and Data Fusion: A Review. In Proceedings of the 2020 IEEE 16th International Conference on Intelligent Computer Communication and Processing (ICCP 2020), Cluj-Napoca, Romania, 3–5 September 2020.
- Wang, J. Research on Key Technologies of Driverless Vehicle Environment Perception System; University of Science and Technology of China: Hefei, China, 2016.
- Wang, Y.; Wang, G.; Chen, C.; Pan, Z. Multi-scale dilated convolution of convolutional neural network for image denoising. Multimed. Tools Appl. 2019, 78, 19945–19960.
- Chen, Q.; Xie, Y.; Guo, S.; Bai, J.; Shu, Q. Sensing system of environmental perception technologies for driverless vehicle: A review of state of the art and challenges. Sens. Actuators A Phys. 2021, 319, 112566.
- Patkar, A.R.; Tasgaonkar, P.P. Object recognition using horizontal array of ultrasonic sensors. In Proceedings of the 2016 International Conference on Communication and Signal Processing (ICCSP), Melmaruvathur, India, 6–8 April 2016.
- Sana, F.; Azad, N.L.; Raahemifar, K. Autonomous Vehicle Decision—Making and Control in Complex and Unconventional Scenarios—A Review. Machines 2023, 11, 676.
- Abbasi, S.; Rahmani, A.M. Artificial Intelligence and Software Modeling Approaches in Autonomous Vehicles for safety Management: A Systematic Review. Information 2023, 14, 555.
- Available online: https://www.europe.autonomous-vehicles-conference.com/ (accessed on 7 November 2023).
- Mateo Sanguino, T.J.; Lozano Domínguez, J.M.; Carvalho Baptista, P. Cybersecurity Certification & Auditing of Automotive Industry: Advances in Transport Policy and Planning. Adv. Transp. Policy Plan. 2020, 5, 95–124.
- Stewart, J. Self-Driving Cars Use Crazy Amounts of Power, and It’s Becoming a Problem: Wired. 2018. Available online: www.wired.com/story/self-driving-cars-power-consumption-nvidia-chip/ (accessed on 7 November 2023).
- Zongwei, L.; Hong, T.; Xu, K.; Han, H.; Fuquan, Z. The Negative Impact of Vehicular Intelligence on Energy Consumption. J. Adv. Transp. 2019, 2019, 1521928.
- Traub, M.; Maier, A.; Barbehön, K.L. Future Automotive Architecture and the Impact of IT Trends. IEEE Softw. 2017, 34, 27–32.
- Gibson, I.; Rosen, D.W.; Stucker, B. Additive Manufacturing Technologies; Springer: New York, NY, USA; Berlin/Heidelberg, Germany; Dordrecht, The Netherlands; London, UK, 2010.
- Mongeon, B. 3D Technology in Fine Art and Craft: Exploration of 3D Printing, Scanning, Sculpting and Milling; Routledge Publishing: Abingdon, UK, 2016; ISBN 9781315730455.
- Jyotish Kumar, L.; Pandey, P.M.; Wimpenny, D.I. 3D Printing and Additive Manufacturing Technologies; Springer Nature Singapore Pte Ltd.: Singapore, 2019.
- Djukanović, M.; Mavrić, A.; Jovanović, J.; Roganović, M.; Bošković, V. Design of 3D Printing Thermo-Sensored Medical Gear in Detecting COVID-19 Symptoms. Appl. Sci. 2021, 11, 419.
- Djukanović, M.; Damjanovic, M.; Radunovic, L.; Jovanovic, M. Optimisation of PLA Filament Consumption for 3D Printing Using the Annealing Method in Home Environment. Stroj. Vestn.-J. Mech. Eng. 2022, 68, 185–190.
- A Full 3D Printing Ecosystem for Educators. Available online: https://www.makerbot.com/ (accessed on 7 November 2023).
- UltiMaker Thingiverse. Available online: https://www.thingiverse.com/ (accessed on 7 November 2023).
- Bothmann, O. 3D Printers: A Beginner’s Guide: A Beginner’s Guide; Fox Chapel Publishing: Mount Joy, PA, USA, 2015; ISBN 978-1565238718.
- Available online: https://www.sculpteo.com/en/ebooks/state-of-3d-printing-report-2017/ (accessed on 7 November 2023).
- Available online: https://www.sculpteo.com/en/ebooks/state-of-3d-printing-report-2021/ (accessed on 7 November 2023).
- Ruiz, L.E.; Pinho, A.C.; Resende, D.N. 3D Printing as a Disruptive Technology for the Circular Economy of Plastic Components of End-of-Life Vehicles: A Systematic Review. Sustainability 2022, 14, 13256.
- Hettesheimer, T.; Hirzel, S.; Roß, H.B. Energy savings through additive manufacturing: An analysis of selective laser sintering for automotive and aircraft components. Energy Effic. 2018, 11, 1227–1245.
More