Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 2 by Rita Xu and Version 1 by Chunyu Ding.
China has successfully carried out five lunar exploration missions since 2007. These missions indicate that China has successfully implemented a three-step lunar exploration program of “orbiting, landing, and returning”. Among them, the Lunar Penetrating Radar (LPR) carried by the Yutu-2 rover in the Chang’E-4 (CE-4) mission is the only one still operating on the far side of the Moon.
- lunar penetrating radar
- lunar regolith
- subsurface structure
1. Introduction
The Moon is the closest extraterrestrial body to the Earth, and it has always been one of the preferred targets for human astronomical and space exploration activities [1,2,3][1][2][3]. The Moon has not only had a significant impact on human production and life but has also had a profound influence on the cultural development and civilization progress of humans [4]. The desire of human beings to explore the Moon has never stopped, and the exploration activities of the Moon can be roughly divided into the following stages: naked-eye observation, observation of the Moon using telescopes, space exploration of the Moon, and the development and use of lunar resources [1].
The first artificial satellite launched by the Soviet Union in 1957, named Sputnik 1, marked the beginning of the space era for human beings [5]. After that, people conducted a series of missions to explore the Moon. These missions include the Pioneer, Ranger, Apollo, and Luna in the 20th century.Furthermore, they also includes the latest missions like CLEMENTINE, LUNAR PROSPECTOR, NASA’s Lunar Reconnaissance Orbiter (LRO), and the Chang’E series of missions from China [6]. Among them, CE-4 achieved the first soft landing of a human probe on the far side of the Moon [7,8,9][7][8][9]. As of now, Yutu-2 is still working on the far side of the Moon, acquiring a large amount of exploration data, which provides valuable first-hand information for scientific research on the Moon [10]. The CE-4 spacecraft is the backup of Chang’E-3 (CE-3), and the Yutu-2 rover mainly carried on it is the same as the Yutu rover carried by CE [11]. The Yutu-2 rover carries mainly four scientific payload devices, e.g., the panoramic camera, the Lunar Penetrating Radar (LPR), the Visible and Near-Infrared Imaging Spectrometer (VNIS), and the Advanced Small Analyzer for Neutrals (ASAN) [11]. Using those devices wresearchers can complete tasks like investigating the geomorphology, mineral compositions, chronology, and subsurface structure of the Moon [9,12][9][12]. Among them, the LPR consists of a transmitting and receiving split antenna, with the transmitting antenna emitting ultra-wideband carrier-free pulses into the lunar surface. The reflected signals are received by the receiving antenna from the probe [13,14][13][14]. Then the radar observation data after preprocessing and other operations, are released to the public scientific community.
The radar carried by Yutu-2 actually is a ground penetrating radar (GPR) [13,15][13][15]. Planetary GPR are applied both for satellites to map sub-glacial water bodies on Mars [16[16][17],17], and for in situ measurements of the planet’s subsurface [8]. The LPR consists of two channels. The center frequency of the low-frequency channel is 60 MHz, whose vertical resolution is meter-level, and the detection depth of it is greater than 100 m [13[13][18],18], aiming to detect the subsurface structure on the lunar rover’s traveling route [14]. The center frequency of the high-frequency radar is 500 MHz, and the vertical resolution in the lunar regolith is better than 0.3 m, which is used to detect the subsurface structure and thickness of the lunar regolith [14]. The range resolution of the high-frequency radar in the simulated lunar regolith of the ground experiment can reach ∼0.17 m, and the detection depth in the glacier is greater than 50 m [18]. On 3 January 2019, the CE-4 mission lander and rover successfully landed on the floor of the Von Kármán Crater (177.588° E, 45.457° S) in the South Pole-Aitken Basin [19[19][20],20], shown in Figure 1. The landing site was chosen for several reasons:
-
Smooth terrain on the bottom of Von Kármán crater: The relatively flat bottom of the Von Kármán crater is crucial for the safe landing of the lander and rover [21]. The lander requires a relatively flat area to reduce risks and ensure a successful and stable landing.
-
Rich geological features: The Von Kármán crater’s bottom exhibits a wealth of geological features. These features provide a unique opportunity for scientists to gain a deeper understanding of the geology and evolutionary history beneath the lunar surface [22]. Most importantly, previous studies discovered water and hydroxyl signatures in rocks on the Moon [23,24][23][24].
-
Formation of the Von Kármán crater: The process of the Von Kármán crater’s formation may have involved excavating material from the Moon’s interior [25], including substances from the lunar mantle, such as olivine and pyroxene [26]. These materials may have been ejected to the surface during the crater’s formation, offering valuable insights into the Moon’s early formation.
By studying the Von Kármán crater, scientists can obtain essential insights into the Moon’s evolution, geological history, and internal structure. This contributes to a better understanding of the Moon’s origin and evolution, as well as its reflection on the early history of the solar system. Therefore, the CE-4 mission holds significant importance for lunar scientific research and exploration. By the end of May 2022, the CE-4 lander and the Yutu-2 rover had completed 42 days of scientific exploration, with a cumulative driving distance of 1171.8 m. As of 6 June 2023, the Yutu-2 rover had already sent back precious and scientific data for 53 lunar days. The findings observed by the Radar from the Yutu-2 rover have given uresearchers a new understanding of the characteristics of the far-side region of the Moon.

Figure 1. Geologic background of the CE–4 landing area on the Moon; (a) location of the landing area; (b) digital elevation model of the landing area; (c) traveling route of the Yutu–2 rover on the lunar surface; (d) operating scene of Yutu–2 rover on the surface of the Moon.
2. Shallow Geological Structures of CE-4 Landing Site
Yutu-2 is the first rover to land on the far side of the Moon, and the LPR is capable of transmitting radar electromagnetic rader waves to the lunar surface [8]. When electromagnetic waves propagate through the ground of the Moon, they are reflected at the interfaces of different materials because different materials have different dielectric constants [13]. Therefore, the echo signals received by the receiving antenna of Yutu-2 are essentially the reflection signals generated at the interfaces when the electromagnetic waves pass through different media. After the raw data received by the LPR are processed using normalization and DC (direct component) removal and other processes [28,29][27][28]. By plotting these data on a 2-D plan view (B-scan), the location of the boundary of materials and the difference between the materials on two sides of the boundary can be observed in a more intuitive way, providing information support for the subsequent geological interpretation. The radar frequencies of the two channels are different, and so are the resolutions of them. Channel 1 is a low-frequency radar, and its effective penetration depth is roughly several hundred meters. Channel 2 is a high-frequency radar, and its effective penetration depth is roughly several tens of meters [11,13][11][13]. Therefore, when interpreting the shallow surface structure of the CE-4 landing zone, it is usually divided into high and low-frequency radar observations for respective interpretation.
2.1. High-Frequency LPR Radar Observation
According to the research of Xiao et al. [30][29], the effective detection depth of the high-frequency radar carried by Yutu-2 is about 40 m. The signal beyond 40 m is close to the noise level and, thus, useless [30][29]. Therefore, the observation data of the high-frequency radar can be used to discuss the stratification of geological structures from the surface to a 40 m depth. According to researchers, the geological subsurface observed by the radar of 40 m can be roughly divided into three geological units (Figure 2), as in the following description:
The first layer is the shallow, fine-grained lunar regolith at a depth of 0–12 m below the surface [8]. According to the radar data after tomographic reconstruction, most of the echo reflectivity in this layer is small, and the distribution of materials is relatively uniform. Therefore, it can be speculated that the material in this layer is mainly fine-grained lunar regolith particles less than 1 cm in diameter [8]. According to the morphological method of the impact crater, the location of the low calcium pyroxene of the Von Kármán crater is about 8–13 m below the surface [31][30], which is consistent with the study of Li et al. [8]. Meanwhile, Li et al. [8] believes that the materials in this layer are developed from the ejecta of craters like the Finsen, Von Kármán L, and L’ craters [8]. Yuan et al. [32][31] made a more detailed division in the division in this layer. Yuan et al. [32][31] believes there is also a geological boundary 2.5 m below the lunar surface. Their research shows that the material between 0 and 2.5 m is from the von Kármán L and L ’crater ejecta (each crater contributes about 1 m in depth), while the materials between 2.5 m to about 12 m are from contemporary craters such as the Finsen [32][31]. Furthermore, it is supported by the results obtained with optical and multispectral imagery [33][32].
This layer was further subdivided into multiple geologic structures for a more refined study [34][33]. Giannakis et al. [34][33] suggests that ejecta from the Von Kármán L and L’ craters cover the entirety of the layer, while ejecta from the Finsen crater are further down. Based on data from Lu et al. [35][34] and the chemical composition analysis from Huang et al. [36][35], Giannakis et al. [34][33] divided the subsurface 0–12 m in the detection area of the Yutu-2 rover into four more detailed sublayers (Figure 2c). Among them, the material in the first two layers and the latter two layers originated from the ejecta of the Von Kármán L and the L’ craters, respectively.
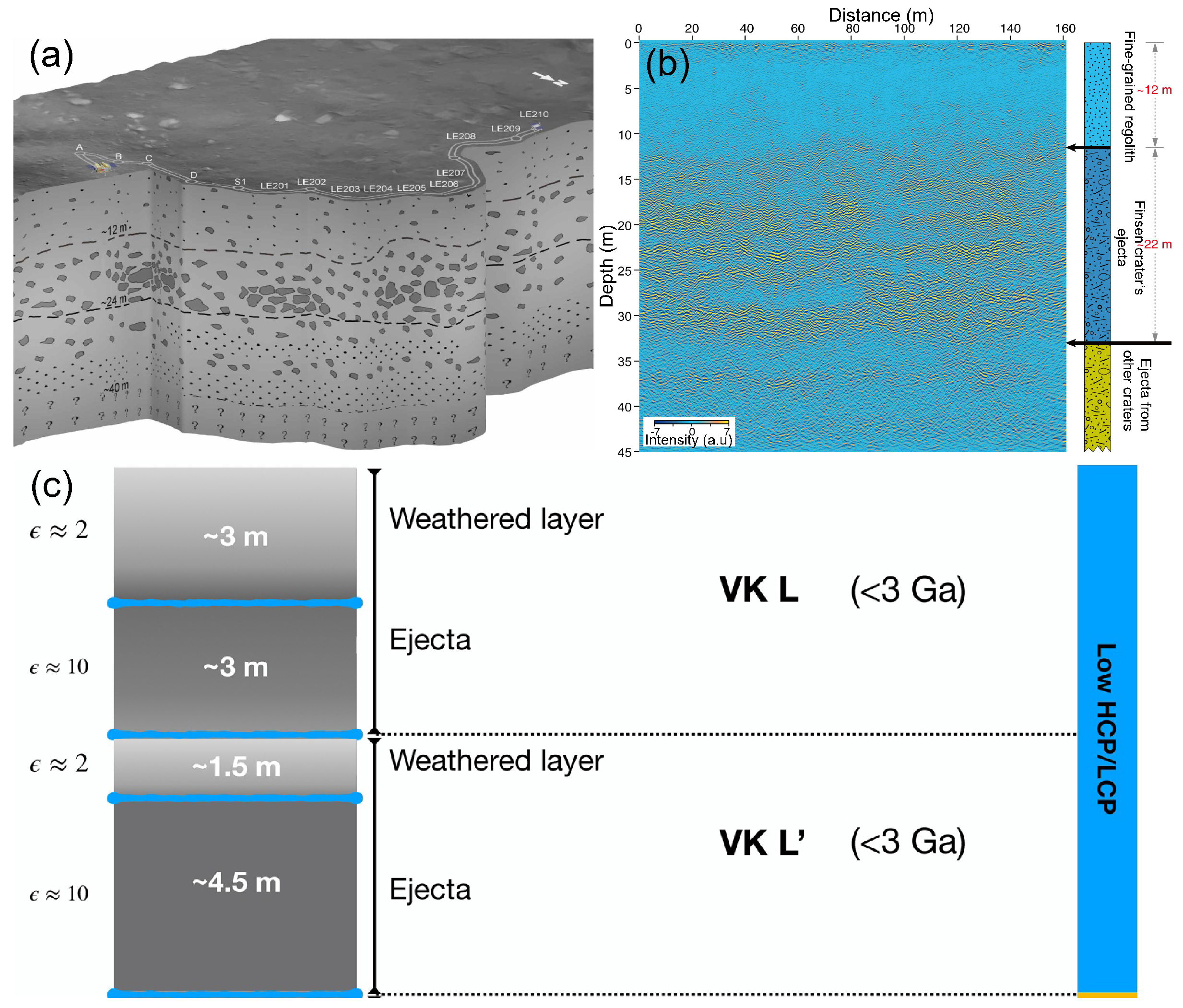
Figure 2. (a) Radargram obtained within the first two lunar days. (b) Geological stratification diagram of the shallow surface layer in the detection area observed with the high-frequency radar. (c) Geological stratification from 0 to 12 m (HCP and LCP for high–calcium pyroxene and low–calcium pyroxene, respectively).
The second layer is a mixture layer ranging from 12 m to 24 m. The layer is characterized by a number of large rock fragments sandwiched between two layers of fine–grained lunar regolith. The Finsen crater is an Eratosthenian crater of about 3.2 Ga [38[36][37][38],39,40], older than the von Kármán L and L’ impact crates. The Yutu-2 detection route is located within the secondary crater chain ejecta range of the Finsen crater, so the large numbers of rocks in this layer are interpreted as ejecta deposits from the Finsen crater. However, the formation of ejecting sediment beyond the ejecting blanket of the source impact crater is not only through carpeting but is also accompanied by a series of transformation processes such as shearing, mixing, and excavation [41][39]. It makes the source of the material layer not necessarily homologous. The tiny–sized rock fragments inside the ejecta may have similar physical properties to the fine-grained lunar regolith. Therefore, it can be inferred that the material composition of the second layer consists of about three parts:
-
The unmodified or moved ejecta material from the impact crater.
-
Local substances modified by impacts from the ejecta.
Using the model of the relation between the crater diameter and the distance of the crater to the CE-4 site, wresearchers can estimate an ejecta thickness of 7.2 to 15.5 m [36][35]. Therefore, the layer can be further divided into two layers: 12–16 m and 16–24 m. The former came from the ejecta, the excavated material of the Finsen crater, and the paleo-regolith formed after the impact, while the latter was formed before the Finsen event.
The third layer is a 24–40 m thickness of accumulated ejecta. This layer is characterized by the alternating layers. These substances were made by ejecta from Alder [36][35], Leibnitz [38,42][36][40] and other older craters [43][41] before the Finsen event. Furthermore, it has a layer between 35 m and 40 m that is interpreted as the bedrock of basalt indicated by crater geomorphological evidence [36,44][35][42]. The signal noise and strong uncertainty are high below 40 m, so it is difficult to determine the accurate depth of Imbrium basalt and the more downward material composition [8,37][8][43].
In summary, although it can have a lot of nonuniqueness when interpreting the radar data [45][44], the echo signals of the Yutu-2 high-frequency radar are relatively clear and clearly stratified, making the stratification of the detected area basically consistent with studies [8,30,34,36,37,46,47][8][29][33][35][43][45][46]. However, due to different methods of processing the LPR data and different interpretations of the geological background of the landing zone, various researchers have different interpretations of the evolutionary process and the origin of different layers [8,30,47][8][29][46]. Therefore, a more quantitative and accurate determination of the distribution of the dielectric constant of subsurface materials is urgently needed in the future.
2.2. Low-Frequency LPR Radar Observation
In the interpretation of low-frequency radar observations, different researchers have made various divisions from different aspects [32,37,46,48][31][43][45][47]. For the rough division explanation, wresearchers will mainly use the division pattern of Feng et al. [49][48]. For a more visual and detailed look at the division, it is shown in the division graph (Figure 3) of Feng et al. [49][48]. Zhang et al. [37][43] divided the 450 m below the lunar surface into three layers:

Figure 3.
(
a
) Image result of low-frequency data. (
b
) Structure of the first 300 m of the Moon at the landing site.
-
The first layer (0~110 m) is the sedimentary layer ejected from other craters.
-
The second layer (110~240 m) is the Imbrium basalt layer.
-
The third layer (240~440 m) is ejecta from the Leibniz crater.
The first layer is the most obvious and uniform layer, but the source of the material is the most controversial. The reason for this may be that this layer contains high-frequency radar observations, but, on the one hand, different researchers have different geological backgrounds. On the another hand, interpreted high-frequency LPR observation obtained with different methods shows different clarity, leading to different opinions when inferring the origin of the material from different details. Therefore, although researchers agree with the division of the layer in general (i.e., the layer’s composition is the sedimentary ejecta from nearby craters), there are different opinions on the source of the material inferred from different details (see Section 2.1). There are researchers who believe that part of the materials originates from the Schrödinger crater [50][49]. So, there are different opinions on the interpretation of this layer in low-frequency radar data since the explanation of the formation of this layer by researchers is very similar to the explanation of the high-frequency LPR observation results.
The second layer is a low-reflectivity geological unit located from 110 m to 240 m. The reflectivity of this layer is significantly lower than the reflectivity of the first and third layers. The material in this layer is interpreted as the basalt from Imbrium. From the perspective of the volcanic event, according to the studies of Ivanov et al. [51][50] and Huang et al. [36][35], the Von Kármán crater was once or repeatedly covered by lava erupted from the Imbrium area, so it is reasonable to infer that the material in this layer is basalt. From the perspective of time, the Leibniz crater occurred about 3.3 Ga ago, and the basalt burst was about 3.1 Ga [35][34], so it is reasonable that the molten basalt burst covered the ejecta of the Leibniz crater. In terms of thickness, according to the morphology of the crater, the coverage depth of the Imbrium-aged basalt in the CE-4 landing area is about 120 m, which is consistent with the thickness detected by the low-frequency LPR [37,52][43][51]. Zhang et al. [46][45] divided this layer into more layers based on the data of the low-frequency LPR radar. They believe that the material from 110 to 130 m and 158 to 163 m below the Moon’s surface developed in the interval between the impact events of the 50~110 m, 130~158 m and 263~280 m layers, and the formation process is similar to the development process of the lunar regolith detected by the high-frequency LPR.
The third layer is a high-reflectivity geological unit located about 240 m to 440 m below the lunar surface. Through stratigraphic studies, the material in this layer may come from the ejecta of the Leibniz crater (∼245 km diameter) formed before about 3.3 Ga [35,53,54][34][52][53]. Meanwhile, the results of numerical simulations infer that the thickness of the ejecta from the Leibniz crater is roughly 200 m thickness at the CE-4 landing site [37][43]. It turns out to be a good agreement with the thickness of this layer detected by the low-frequency LPR radar. However, Zhang et al. [46][45] considered that the material at 163~263 m below the lunar surface is Imbrium-aged basalt, which is an intermediate layer between lava flows. Meanwhile, there is a 17 m thick geological layer around 263~280 m below the lunar surface. It is assumed that this layer is ejecta material from the Alder crater and that the material in the 280~360 m below this is not from the Leibniz crater but is Imbrium-aged basalt. The possible reason for this variability in interpretation lies in the differences in the interpretation of the geological genesis by different researchers. Moreover, the constraints on the physical properties of the different layers below the lunar surface need to be further investigated.
2.3. Effectiveness of Low-Frequency Radar Data
Although high-frequency and low-frequency LPR data have helped uresearchers understand the Moon. However, there is a debate about the effectiveness of low-frequency LPR radar data. Pettinelli et al. [55][54] considered that most of the low-frequency LPR radar data within 3000 ns are almost all invalid signals caused by instruments or other factors except those within 500–1800 ns and 2000–3000 ns. In their paper, Pettinelli et al. [55][54] made average time amplitude(ATA) diagrams and spectral diagrams of the detection data obtained within 10 m of the low-frequency LPR carried by CE-3 and CE-4 and verified each other to point out problems. In terms of spectrograms, Pettinelli et al. [55][54] found that the frequency of the signal within the time window of CE-3 and CE-4 within 4500 ns fluctuated from 0 to 100 MHz. However, almost all are 0–30 MHz low-frequency letter-based, with too much deviation from the designed frequency of the low-frequency radar (60 MHz). Moreover, the CE-3 signals within 3000 ns are composed of almost constant low-frequency signals, which means that the signal is noise. In terms of the ATA diagram, Pettinelli et al. [55][54] highlighted two issues.
The first issue is that although the two different hemispheres of CE-3 and CE-4 landed on the Moon, the ATA diagram within 2000 ns is almost identical, with almost consistent peaks and troughs. Additionally, the data outside 2000 ns are very similar. The physical significance is that in the cross-section diagram made of two signals, both have almost equally smooth horizontal lines at similar depth positions at 2000 ns. The only difference between the two is that the cross-section of the CE-4 signal shows a little non-smooth area at the top surface.
The second issue is that, from the ATA diagram, the two signals have almost the same decay time. Both signals almost all reached the noise level at 3000 ns. In short, the ATA diagrams of the two sets of signals are very similar. In addition, Pettinelli et al. [55][54] considered through the ATA diagram that the signal near 3700 ns was the only signal above the noise level, but it was also composed of signals at too-low frequencies.
In summary, Pettinelli et al. [55][54] suggested that the signal in the first 2000 ns of the CE4 radar cross section is mainly composed of the time-invariant coherent noise of too-low frequencies. This noise appears as a horizontal band sequence in the cross-section. The signals after 3000 ns are either noise-level or invalid signals composed of too low-frequencies [55][54].
Zhang et al. [56][55] responded to Pettinelli et al. [55][54]’s query. In response, Zhang et al. [56][55] acknowledged that the ATA diagram of the signals of CE-3 and CE-4 were similar in the low-frequency signal region due to electromagnetic interference and noise, with the same overall decay time. However, they argue that differences in the ATA curves after 1100 ns are readily discernible. Meanwhile, they emphasize that the system disturbance and noise can be greatly reduced by subtracting the average trace from each curve because they are reproducible and recognizable. The signal after 1100 ns in the ATA plot that they made by subtracting the average trace (Figure 4) also has a significant difference.
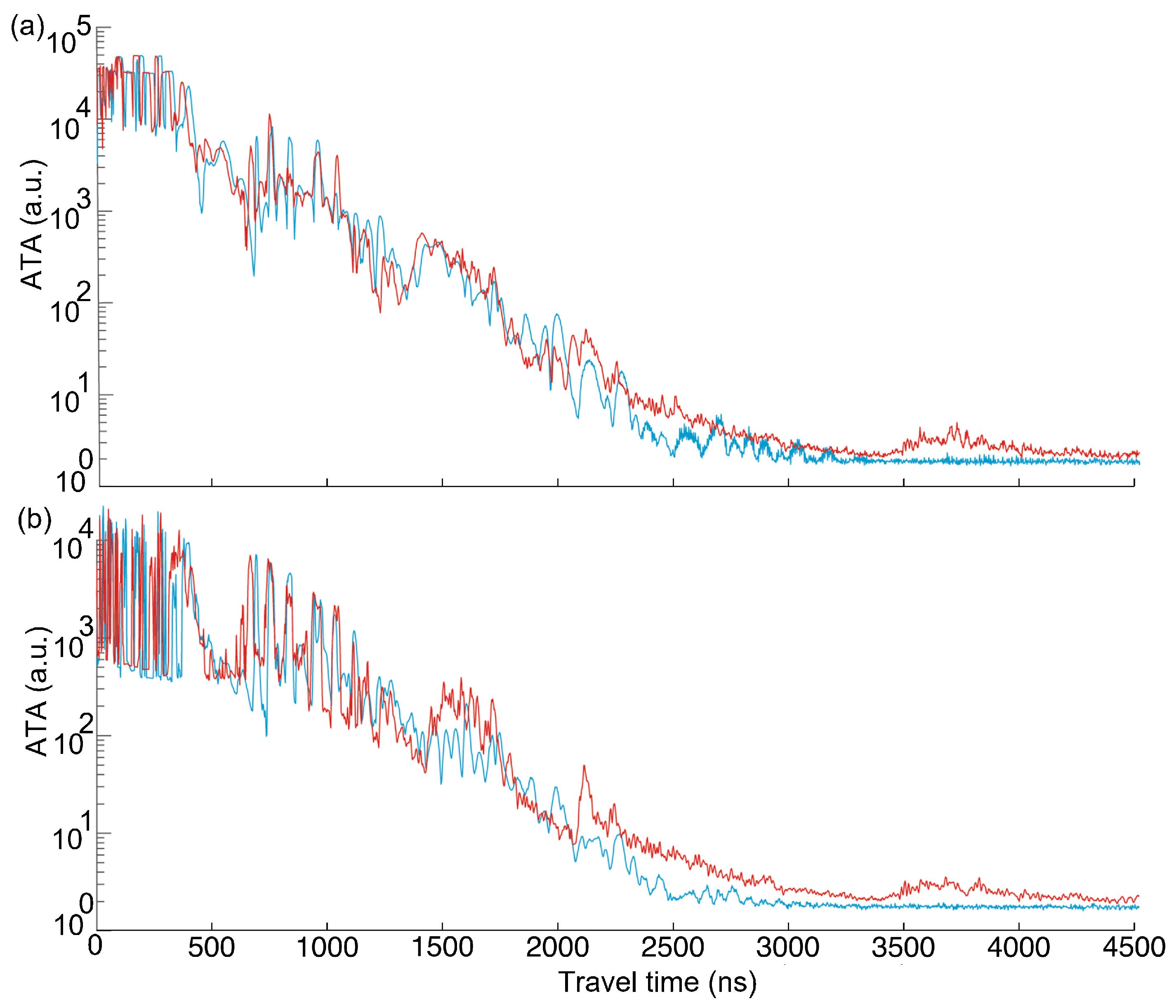
Figure 4. ATA diagram of the low-frequency LPR signal. (a) Comparison of the ATA plots between the low-frequency LPR data. The ATA curves were computed from the raw low-frequency LPR data acquired by CE-3 along its ∼114 m long track (blue line) and by CE-4 (red line). (b) The ATA plots after subtracting the background.
Furthermore, Zhang et al. [56][55] responded to the issue raised by Pettinelli et al. [55][54] about the same cross-section lines appearing at the same time and location in the cross-section plots made from the two signals. Zhang et al. [56][55] agreed that this was an issue caused by the background of the system, but that this problem could be solved by choosing the right band-pass filtering. Zhang et al. [56][55] made plots of the signal processed with either 10–80 MHz or 30–80 MHz band-pass filtering and concluded that the narrow and strong reflections within 1.4–1.8 µs and 2.0–2.2 µs have slopes between traces 1600 and 2600, indicative of subsurface boundaries rather than the invariant system noise. On top of that, there are more time periods where the signals can prove that it is a reflection rather than an over-interpretation.
Overall, Zhang et al. [56][55] concluded that strong disturbances and noise can be largely reduced by subtracting the data averaged over several lunar days from each trace. The background can be significantly reduced using band-pass filtering, additionally enhancing the echoes from the lunar subsurface stratigraphy, especially for deep reflections after 1100 ns. Zhang et al. [56][55] were able to respond well to some of the issues raised by Pettinelli et al. [55][54]. However, other researchers have also given some warning of the pitfalls when interpreting radar data [57][56]. In terms of importance, the effectiveness of the data from the low-frequency LPR radars is questionable, due to the fact that the noise problem is caused by the instrument itself. This would lead to difficult corroboration between the conclusions of structural layering within 110 m obtained by the high-frequency and low-frequency soundings respectively. On the other hand, the issues solved in the process of validating the radar data will also enable the academic community to understand the concerns of the radar.
References
- Ouyang, Z.; Zhou, Y.; Li, C.; Liu, J. The prospect of exploitation and utilization of some lunar resources. Earth Sci. 2002, 27, 498–503.
- Ding, C.; Feng, J.; Zheng, L.; Dai, S.; Xing, S.; Xiao, Y.; Su, Y. A review of applications of radar-detection techniques in lunar explorations. Astron. Res. Technol.-Publ. Natl. Astron. Obs. China 2015, 12, 228–242.
- Li, C.; Liu, J.; Ren, X.; Zuo, W.; Tan, X.; Wen, W.; Li, H.; Mu, L.; Su, Y.; Zhang, H.; et al. The Chang’e 3 mission overview. Space Sci. Rev. 2015, 190, 85–101.
- Foster, R.G.; Roenneberg, T. Human responses to the geophysical daily, annual and lunar cycles. Curr. Biol. 2008, 18, R784–R794.
- Dickson, P. Sputnik: The Shock of the Century; Bloomsbury Publishing USA: New York, NY, USA, 2001.
- Ouyang, Z. Introduction to Lunar Science; China Aerospace Press: Beijing, China, 2005; pp. 151–251.
- Wu, W.; Yu, D.; Wang, C.; Liu, J.; Tang, Y.; Zhang, H.; Zhang, Z. Technological breakthroughs and scientific progress of the Chang’e-4 mission. Sci. China Inf. Sci. 2020, 63, 1–14.
- Li, C.; Su, Y.; Pettinelli, E.; Xing, S.; Ding, C.; Liu, J.; Ren, X.; Lauro, S.E.; Soldovieri, F.; Zeng, X.; et al. The Moon’s farside shallow subsurface structure unveiled by Chang’E-4 Lunar Penetrating Radar. Sci. Adv. 2020, 6, eaay6898.
- Li, C.; Zuo, W.; Wen, W.; Zeng, X.; Gao, X.; Liu, Y.; Fu, Q.; Zhang, Z.; Su, Y.; Ren, X.; et al. Overview of the Chang’e-4 mission: Opening the frontier of scientific exploration of the lunar far side. Space Sci. Rev. 2021, 217, 1–32.
- Ding, L.; Zhou, R.; Yuan, Y.; Yang, H.; Li, J.; Yu, T.; Liu, C.; Wang, J.; Li, S.; Gao, H.; et al. A 2-year locomotive exploration and scientific investigation of the lunar farside by the Yutu-2 rover. Sci. Robot. 2022, 7, eabj6660.
- Jia, Y.; Zou, Y.; Ping, J.; Xue, C.; Yan, J.; Ning, Y. The scientific objectives and payloads of Chang’E- 4 mission. Planet. Space Sci. 2018, 162, 207–215.
- Ling, Z.; Qiao, L.; Liu, C.; Cao, H.; Bi, X.; Lu, X.; Zhang, J.; Fu, X.; Li, B.; Liu, J. Composition, mineralogy and chronology of mare basalts and non-mare materials in Von Kármán crater: Landing site of the Chang’E- 4 mission. Planet. Space Sci. 2019, 179, 104741.
- Fang, G.Y.; Zhou, B.; Ji, Y.C.; Zhang, Q.Y.; Shen, S.X.; Li, Y.X.; Guan, H.F.; Tang, C.J.; Gao, Y.Z.; Lu, W.; et al. Lunar Penetrating Radar onboard the Chang’e-3 mission. Res. Astron. Astrophys. 2014, 14, 1607.
- Su, Y.; Fang, G.Y.; Feng, J.Q.; Xing, S.G.; Ji, Y.C.; Zhou, B.; Gao, Y.Z.; Li, H.; Dai, S.; Xiao, Y.; et al. Data processing and initial results of Chang’e-3 lunar penetrating radar. Res. Astron. Astrophys. 2014, 14, 1623.
- Ding, C.; Li, J.; Hu, R. Moon-based Ground Penetrating Radar Observation of the Latest Volcanic Activity at the Chang’E-4 Landing Site. IEEE Trans. Geosci. Remote Sens. 2023, 61, 4600410.
- Lauro, S.E.; Pettinelli, E.; Caprarelli, G.; Guallini, L.; Rossi, A.P.; Mattei, E.; Cosciotti, B.; Cicchetti, A.; Soldovieri, F.; Cartacci, M.; et al. Multiple subglacial water bodies below the south pole of Mars unveiled by new MARSIS data. Nat. Astron. 2021, 5, 63–70.
- Orosei, R.; Ding, C.; Fa, W.; Giannopoulos, A.; Hérique, A.; Kofman, W.; Lauro, S.E.; Li, C.; Pettinelli, E.; Su, Y.; et al. The global search for liquid water on Mars from orbit: Current and future perspectives. Life 2020, 10, 120.
- Zhang, H.B.; Zheng, L.; Su, Y.; Fang, G.Y.; Zhou, B.; Feng, J.Q.; Xing, S.G.; Dai, S.; Li, J.D.; Ji, Y.C.; et al. Performance evaluation of lunar penetrating radar onboard the rover of CE-3 probe based on results from ground experiments. Res. Astron. Astrophys. 2014, 14, 1633.
- Di, K.; Liu, Z.; Liu, B.; Wan, W.; Peng, M.; Wang, Y.; Gou, S.; Yue, Z.; Xin, X.; Jia, M.; et al. Chang’e-4 lander localization based on multi-source data. J. Remote Sens. 2019, 23, 177–184.
- Ding, C.; Xiao, Z.; Wu, B.; Li, Y.; Prieur, N.C.; Cai, Y.; Su, Y.; Cui, J. Fragments delivered by secondary craters at the Chang’E-4 landing site. Geophys. Res. Lett. 2020, 47, e2020GL087361.
- Wu, B.; Li, F.; Hu, H.; Zhao, Y.; Wang, Y.; Xiao, P.; Li, Y.; Liu, W.C.; Chen, L.; Ge, X.; et al. Topographic and geomorphological mapping and analysis of the Chang’E-4 landing site on the far side of the Moon. Photogramm. Eng. Remote Sens. 2020, 86, 247–258.
- Tartèse, R.; Anand, M.; Gattacceca, J.; Joy, K.H.; Mortimer, J.I.; Pernet-Fisher, J.F.; Russell, S.; Snape, J.F.; Weiss, B.P. Constraining the evolutionary history of the Moon and the inner solar system: A case for new returned lunar samples. Space Sci. Rev. 2019, 215, 54.
- Li, S.; Lucey, P.G.; Milliken, R.E.; Hayne, P.O.; Fisher, E.; Williams, J.P.; Hurley, D.M.; Elphic, R.C. Direct evidence of surface exposed water ice in the lunar polar regions. Proc. Natl. Acad. Sci. USA 2018, 115, 8907–8912.
- Robinson, K.L.; Taylor, G.J. Heterogeneous distribution of water in the Moon. Nat. Geosci. 2014, 7, 401–408.
- Hagerty, J.J.; Lawrence, D.; Hawke, B. Thorium abundances of basalt ponds in South Pole-Aitken basin: Insights into the composition and evolution of the far side lunar mantle. J. Geophys. Res. Planets 2011, 116, E0600.
- Li, C.; Liu, D.; Liu, B.; Ren, X.; Liu, J.; He, Z.; Zuo, W.; Zeng, X.; Xu, R.; Tan, X.; et al. Chang’E-4 initial spectroscopic identification of lunar far-side mantle-derived materials. Nature 2019, 569, 378–382.
- Ding, C.; Li, C.; Xiao, Z.; Su, Y.; Xing, S.; Wang, Y.; Feng, J.; Dai, S.; Xiao, Y.; Yao, M. Layering structures in the porous material beneath the Chang’e-3 landing site. Earth Space Sci. 2020, 7, e2019EA000862.
- Feng, J.; Su, Y.; Ding, C.; Xing, S.; Dai, S.; Zou, Y. Dielectric properties estimation of the lunar regolith at CE-3 landing site using lunar penetrating radar data. Icarus 2017, 284, 424–430.
- Xiao, Z.; Ding, C.; Xie, M.; Cai, Y.; Cui, J.; Zhang, K.; Wang, J. Ejecta from the Orientale basin at the Chang’E-4 landing site. Geophys. Res. Lett. 2021, 48, e2020GL090935.
- Quaide, W.L.; Oberbeck, V.R. Thickness determinations of the lunar surface layer from lunar impact craters. J. Geophys. Res. 1968, 73, 5247–5270.
- Yuan, Y.; Zhu, P.; Xiao, L.; Huang, J.; Garnero, E.J.; Deng, J.; Wang, F.; Qian, Y.; Zhao, N.; Wang, W.; et al. Intermittent volcanic activity detected in the Von Kármán crater on the farside of the Moon. Earth Planet. Sci. Lett. 2021, 569, 117062.
- Qiao, L.; Ling, Z.; Fu, X.; Li, B. Geological characterization of the Chang’e-4 landing area on the lunar farside. Icarus 2019, 333, 37–51.
- Giannakis, I.; Zhou, F.; Warren, C.; Giannopoulos, A. Inferring the shallow layered structure at the Chang’E-4 landing site: A novel interpretation approach using lunar penetrating radar. Geophys. Res. Lett. 2021, 48, e2021GL092866.
- Lu, Y.; Wu, Y.; Michael, G.G.; Ma, J.; Cai, W.; Qin, N. Chronological sequence of Chang’E-4 landing zone within Von Kármán crater. Icarus 2021, 354, 114086.
- Huang, J.; Xiao, Z.; Flahaut, J.; Martinot, M.; Head, J.; Xiao, X.; Xie, M.; Xiao, L. Geological characteristics of Von Kármán crater, northwestern south pole-Aitken Basin: Chang’E-4 landing site region. J. Geophys. Res. Planets 2018, 123, 1684–1700.
- Losiak, A.; Wilhelms, D.; Byrne, C.; Thaisen, K.; Weider, S.; Kohout, T.; O’Sullivan, K.; Kring, D. A new lunar impact crater database. In Proceedings of the 40th Annual Lunar and Planetary Science Conference, The Woodlands, TX, USA, 23–27 March 2009; p. 1532.
- Wilhelms, D.E.; McCauley, J.F.; Trask, N.J. The Geologic History of the Moon; Technical Report; U.S. Geological Survey Publications Warehouse: Reston, VA, USA, 1987.
- Pasckert, J.H.; Hiesinger, H.; van der Bogert, C.H. Lunar farside volcanism in and around the South Pole–Aitken basin. Icarus 2018, 299, 538–562.
- Melosh, H.J. Impact Cratering: A Geologic Process; Oxford University Press: New York, NY, USA; Clarendon Press: Oxford, UK, 1989.
- Yingst, R.; Chuang, F.; Berman, D.; Mest, S. Geologic mapping of the Planck Quadrangle of the Moon (LQ-29). In Proceedings of the 48th Annual Lunar and Planetary Science Conference, The Woodlands, TX, USA, 20–24 March 2017; p. 1680.
- Chang, Y.; Xiao, Z.; Wang, Y.; Ding, C.; Cui, J.; Cai, Y. An updated constraint on the local stratigraphy at the Chang’E-4 landing site. Earth Planet. Phys. 2021, 5, 19–31.
- Zhao, N.; Zhu, P.; Yang, K.; Yuan, Y.; Guo, S. The preliminary processing and analysis of LPR Channel-2B data from Chang’E-3. Sci. China Phys. Mech. Astron. 2014, 57, 2346–2353.
- Zhang, J.; Zhou, B.; Lin, Y.; Zhu, M.H.; Song, H.; Dong, Z.; Gao, Y.; Di, K.; Yang, W.; Lin, H.; et al. Lunar regolith and substructure at Chang’E-4 landing site in South Pole–Aitken basin. Nat. Astron. 2021, 5, 25–30.
- Baker, V. Planetary geomorphology: Some historical/analytical perspectives. Geomorphology 2015, 240, 8–17.
- Zhang, L.; Li, J.; Zeng, Z.; Xu, Y.; Liu, C.; Chen, S. Stratigraphy of the Von Kármán Crater Based on Chang’E-4 Lunar Penetrating Radar Data. Geophys. Res. Lett. 2020, 47, e2020GL088680.
- Lai, J.; Xu, Y.; Zhang, X.; Xiao, L.; Yan, Q.; Meng, X.; Zhou, B.; Dong, Z.; Zhao, D. Comparison of dielectric properties and structure of lunar regolith at Chang’e-3 and Chang’e-4 landing sites revealed by ground-penetrating radar. Geophys. Res. Lett. 2019, 46, 12783–12793.
- Lai, J.; Xu, Y.; Bugiolacchi, R.; Meng, X.; Xiao, L.; Xie, M.; Liu, B.; Di, K.; Zhang, X.; Zhou, B.; et al. First look by the Yutu-2 rover at the deep subsurface structure at the lunar farside. Nat. Commun. 2020, 11, 3426.
- Feng, J.; Siegler, M.A.; Su, Y.; Ding, C.; Giannakis, I. Layered Structures in the Upper Several Hundred Meters of the Moon Along the Chang’E-4 Rover’s First 1000-m Traverse. J. Geophys. Res. Planets 2023, 128, e2022JE007714.
- Cao, H.; Xu, Y.; Xu, L.; Zhang, L.; Bugiolacchi, R.; Zhang, F. From Schrödinger to Von Kármán: An Intriguing New Geological Structure Revealed by the Chang’e-4 Lunar Penetrating Radar. Geophys. Res. Lett. 2023, 50, e2022GL101413.
- Ivanov, M.; Hiesinger, H.; Van Der Bogert, C.; Orgel, C.; Pasckert, J.; Head, J. Geologic history of the northern portion of the South Pole-Aitken basin on the Moon. J. Geophys. Res. Planets 2018, 123, 2585–2612.
- Du, J.; Fa, W.; Wieczorek, M.A.; Xie, M.; Cai, Y.; Zhu, M.H. Thickness of lunar mare basalts: New results based on modeling the degradation of partially buried craters. J. Geophys. Res. Planets 2019, 124, 2430–2459.
- Stuartz, A. Geologic Map of the Central Far Side of the Moon; U.S. Geological Survey Publications Warehouse: Reston, VA, USA, 1978.
- Fu, X.H.; Qiao, L.; Zhang, J.; Ling, Z.C.; Li, B. The subsurface structure and stratigraphy of the Chang’E-4 landing site: Orbital evidence from small craters on the Von Kármán crater floor. Res. Astron. Astrophys. 2020, 20, 008.
- Pettinelli, E.; Lauro, S.E.; Mattei, E.; Cosciotti, B.; Soldovieri, F. Stratigraphy versus artefacts in the Chang’e-4 low-frequency radar. Nat. Astron. 2021, 5, 890–893.
- Zhang, J.; Zhou, B.; Lin, Y. Reply to: Stratigraphy versus artefacts in the Chang’e-4 low-frequency radar. Nat. Astron. 2021, 5, 894–897.
- Li, C.; Xing, S.; Lauro, S.E.; Su, Y.; Dai, S.; Feng, J.; Cosciotti, B.; Di Paolo, F.; Mattei, E.; Xiao, Y.; et al. Pitfalls in GPR data interpretation: False reflectors detected in lunar radar cross sections by Chang’e-3. IEEE Trans. Geosci. Remote Sens. 2017, 56, 1325–1335.
More