Smart cities leverage the Internet of Things (IoT) to collect data from various sources and employ data-driven approaches to improve the management, evaluation, and decision-making processes. From a core network perspective, service function chaining (SFC) is an enabling paradigm for elastically controlling the massive network services (NS) from IoT-empowered smart cities. SFC can effectively enforce policies and regulations set by city authorities, including data retention policies, content filtering, compliance checks, etc. Moreover, SFC optimizes service delivery, resource efficiency, quality of experience (QoE)/quality of service (QoS), and service-specific routing. To activate all the beneficial factors, mobile network operators need solutions to reflect SFC orchestration policies while ensuring efficient resource utilization and preserving QoS in large-scale networking congestion states.
- graph neural networks
- quality of service
- service function chaining
- smart city
- virtual network functions
1. IoT Service Composition and QoS Class Identifier (QCI) for Smart City Applications
| QCI-Index | Resource Type | Priority Level | PDB | PELR | Smart City Examples |
|---|---|---|---|---|---|
| QCI 1 (Conversational Voice) | GBR | 2 | 100 ms | 10−2 | Smart Emergency Services |
| QCI 2 (Conversational Video) | 3 | 150 ms | 10−3 | Smart Surveillance | |
| QCI 4 (Buffered Streaming) | 5 | 300 ms | 10−6 | Smart PIDs | |
| QCI 70 (Mission Critical Data) | Non-GBR | ||||
| Smart Transportation | |||||
| QCI 9 (Background) | 9 | 300 ms |
-
QCI 1 (conversational voice) is typically used for voice communication services, including smart emergency services (e.g., emergency response systems, public safety networks, or other government services).
| 5.5 | |||
| 200 ms | |||
| 10 | −6 | Smart Infrastructure Control | |
| QCI 79 (V2X messages) | 6.5 | 50 ms | 10−2 |
| 10 | −6 | Smart Waste Management |
- QCI 2 (conversational video) is designed for real-time video surveillance systems in traffic monitoring, object detection, facial recognition, or other visual monitoring applications.
-
QCI 4 (buffered streaming) is suitable for smart public information displays (PIDs) such as real-time information and interactive features to engage and inform the public (e.g., digital signage, message boards, or even live event streaming).
-
QCI 70 (mission critical data) is designed for services that require low latency and high reliability, including smart applications to control critical infrastructure in the city (e.g., utility grid management, building automation, or electricity distribution).
-
QCI 79 (V2X messages) is indicated for the components of modern urban mobility by gathering information on vehicles-to-vehicles, vehicles-to-infrastructure, vehicles-to-pedestrians, and vehicle-to-networks to develop a smart transportation system. With guaranteed performance indicators, smart transportation offers traffic flow optimization and safety enhancement in the city.
-
QCI 9 (background) is intended for applications that have lower priority and can tolerate delay, including sensor data collection, environmental monitoring, waste management, or other non-real-time data flows.
2. Related Works on GNN-Based Optimization
Deep learning integration has been used for various aspects of network optimization [9][10][31,32] and in the context of large-scale SFC management in smart cities [11][12][33,34]. GNN is a class of deep learning models designed for analyzing and extracting hidden features from graph-structured data. GNN operates by propagating information across nodes and edges in a graph, which captures key relationships and dependencies within the data [13][14][35,36]. In a networking MANO perspective, GNN can generate representations from graph-based SFC data and predict the chain performance, which can be used for various tasks such as load balancing and congestion control [15][37]. In [16][38], a new neural network architecture for SFC based on GNN was proposed. The encoder-decoder architecture indicated representations of network topology and estimated probabilities of neighbor nodes and VNF processing. The GNN-based modeling outperforms the baseline deep neural network model and provides flexibility to topology changes. In [17][39], a knowledge-defined networking system was proposed to predict the optimal path for SFC deployment and traffic steering using GNN. GNN-based modeling, RouteNet [18][40], was used to extract hidden information on network topology, routing, and traffic metrics for predicting the delay and loss ratio from source to destination.3. Working Flow of Large-Scale SFC with GNN
TheOur orchestration policy consists of two primary objectives, namely QoS guarantee and efficient VNF backup, for ensuring high availability and fault tolerance in large-scale and high congestion of SFC request rates. The system model prioritizes each smart city service criticality following the upper-bound delay and remaining resources. ResearchersIn this study, we focus on GNN node classification that detects the efficiency of VNF- instances following the service criticality. To avoid single-server failure, when the duplicating decision is set, the proposed large-scale SFC with GNN (LS-SFC-GNN) spreads the VM-VNF placement on different physical nodes. Each physical node with a set of VNF-f placement has an assigned feature vector. In theour use case of large-scale SFC for smart city applications, the features contain 6-tuple information as follows: (1) node indicator and the output decision variable in initial timeslot, (2) resource capacity, (3) expected latency, (4) current loading, (5) operating statues (whether VNF node is currently operational or standby), and (6) service upper-bound requirement. The input features are used to create feature vectors for each VNF node in the SFC graph.
By obtaining the feature vector, message aggregation is executed. For each node and VNF, messages from the neighboring nodes and sequential instances are jointly operated. ResWearchers use 3 different aggregation methods for 3 following conditions: (1) if all neighboring nodes are related to the current service chain; therefore, the proposed system can capture the cumulative impact of neighboring nodes on the feature representation of the central node, (2) if all neighboring nodes are balanced for future duplications, and (3) if there is different link bandwidth capacities that have bias values to guides the next VNF instances for duplicating in a changing physical node. After the aggregated message is obtained, the algorithm proceeds with the combination with the current feature using the update function to get the hidden features. The update function can be a neural network layer or a sequence of layers.
The integrated GNN consists of multiple layers of message passing. In each layer, the nodes exchange information with the neighbors and update the features. The number of layers is reflected in the message aggregation and update. After all layers of message passing, the final feature vectors represent the nodes in the graph and capture information from the local and global neighborhoods. Later, rwesearchers apply a classification head to the final node representations for predicting the class probabilities on decision variables. The objective is to indicate whether the node requires duplication or is still efficient in the current timeslot. The GNN module is iteratively executed to minimize the loss using backpropagation and gradient descent. ResearchersWe compute the gradients for the model parameters, which can be learned weights in the aggregation and update functions.
After the output of GNN is obtained, the policy adjusts to managing and orchestrating VNF instances while leveraging SDN flow rule installation. ResWearchers study large-scale request rates of SFC; therefore, the placement of VNF backup and duplication decisions are emphasized by following the orchestration conditions as follows:
- If current loading and operating statutes weight the class probability on decision variable output 0, the orchestration policy duplicates that particular VNF in other physical nodes. The allocation's decision variable is re-configured to alter the placement, and the SDN controller installs the flow rule accordingly.
- Otherwise, if the total time consumption approximation from GNN output reflects 0, rwesearchers reconsider the decision variable (allocation) to check for alternative VNF instances that can be matched.
- Furthermore, resource allocation properties (CPU, Memory, Disk) are re-adjusted to ensure that the approximation satisfies the QoS constraints.
4. Experiment Settings
Figure 1This section presents the simulation architecture with multi-purpose VNFs and chaining isolation to support our SFC orchestration policy on offering alternative VNF instances and duplicating on different VM resource blocks. Figure 1 is given to represent the ingress data sources and egress end-user interfaces of each smart city service. ResearchWers propose an intelligent service function (ISF) to perform modern services; however, due to the lack of real-world open-source data of smart city SFC, researcherswe approximate the executing delays of each ISF by following the maximum thresholds of computing time in each QCI class. Each VM placement is determined based on the criticality and resource consumption of each service, corresponding to the nodes in the experiment.
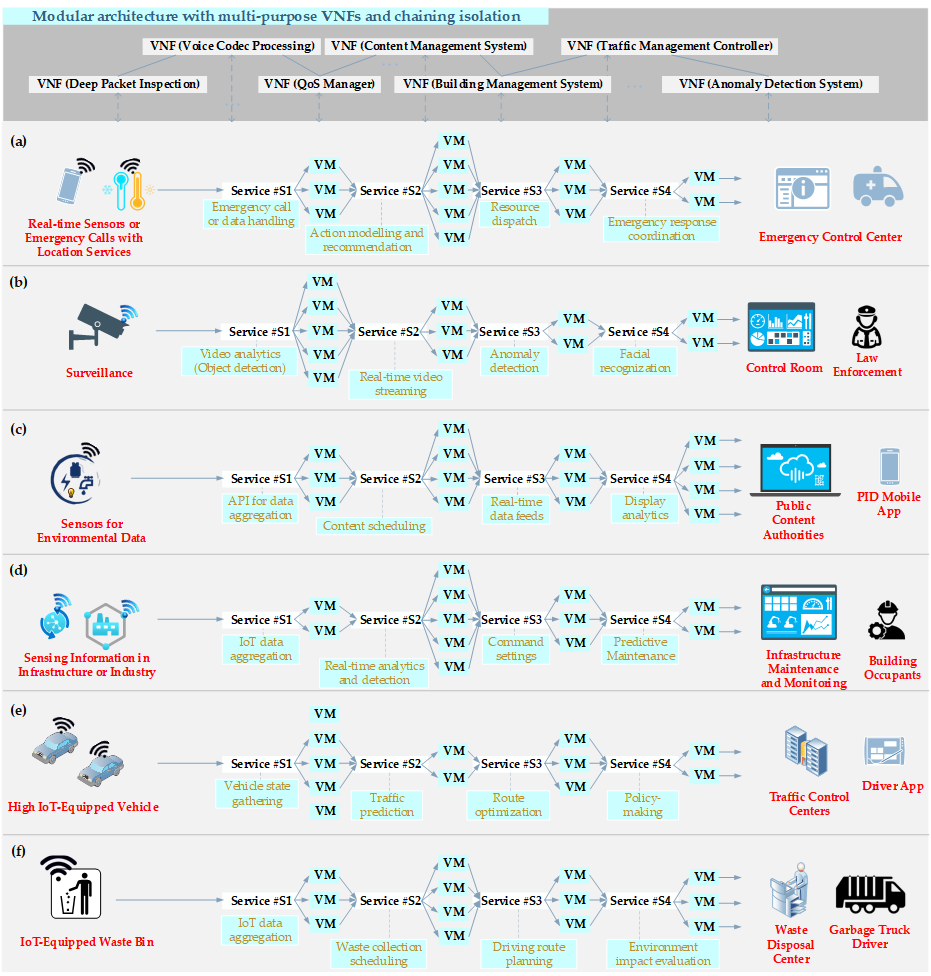
Figure 1. Use cases of smart city applications from ingress data sources to the egress end-user interfaces, namely (a) smart emergency services, (b) smart surveillance, (c) smart PIDs, (d) smart infrastructure control, (e) smart transportation, and (f) smart waste management.
For example, the case of smart surveillance begins with live video camera streaming to feed service S1, namely video analytics (object detection). TIn theis study, our primary focus is on scaling SFC; therefore, the intelligent model responsible for executing S1 is configured to be well-trained with high accuracy to preemptively address any potential issues. S1 is allocated to 5 VMs, which is higher than the allocation for other services in the chain because it demands a significant computational capacity due to early staging video input and preprocessing requirements. ResearchersWe replicated different VM amounts for various services in the chain to ensure that each service receives the appropriate level of computational resources and can operate optimally. The allocation of VMs and vCPU is based on theour model output, specific resource requirements, criticality weights, and resource consumption of each service. However, the allocation of VMs is dynamic in the experiments, which refers to the feasibility of changing replication in case of overloading congestion detected in other services.
Table 2 gives the detailed deployment properties of each use case in theour experiment including bandwidth (Mbps), vCPU, RAM, and replication VMs. The modular architecture with multi-purpose VNFs is designed to serve various purposes within the SFC process by globalizing the service objectives and expecting to be chained in a flexible and scalable way (using LS-SFC-GNN output).
Table 2.
Deployment properties of each use case with its proposed ISFs.
|
Use Case |
ISF |
Bandwidth (Mbps) |
vCPU |
RAM (GB) |
Replication VMs |
|
Smart Emergency Services |
Emergency call or data handling |
100 |
4 |
8 |
3 |
|
Action modelling and recommendation |
50 |
2 |
4 |
5 |
|
|
Resource dispatch |
80 |
3 |
6 |
3 |
|
|
Emergency response coordination |
120 |
5 |
10 |
2 |
|
|
Smart Surveillance |
Object Detection |
150 |
6 |
12 |
5 |
|
Video Streaming |
200 |
8 |
16 |
3 |
|
|
Anomaly Detection |
100 |
4 |
8 |
2 |
|
|
Facial Recognition |
80 |
3 |
6 |
2 |
|
|
Smart PIDs |
API for data aggregation |
100 |
4 |
8 |
3 |
|
Content scheduling |
50 |
2 |
4 |
4 |
|
|
Real-time data feeds |
120 |
5 |
10 |
3 |
|
|
Display analytics |
80 |
3 |
6 |
4 |
|
|
Smart Infrastructure Control |
API for data aggregation |
120 |
6 |
12 |
2 |
|
Real-time analytics and detection |
150 |
6 |
12 |
5 |
|
|
Command settings |
80 |
3 |
6 |
3 |
|
|
Predictive maintenance |
120 |
5 |
10 |
2 |
|
|
Smart Transportation |
Vehicle state gathering |
100 |
4 |
8 |
5 |
|
Traffic prediction |
100 |
4 |
8 |
2 |
|
|
Route optimization |
120 |
5 |
10 |
3 |
|
|
Policy-making |
80 |
3 |
6 |
2 |
|
|
Smart Waste Management |
API for data aggregation |
100 |
4 |
8 |
3 |
|
Waste collection scheduling |
60 |
3 |
6 |
4 |
|
|
Driving route planning |
100 |
5 |
10 |
3 |
|
|
Environment impact evaluation |
70 |
4 |
8 |
3 |
The high-performance hosting infrastructure is used for splitting the computational demands of large-scale smart city simulation as listed in Table 3Table 2 (one experiment runtime, one use case). The maximum tolerable delay ranging from 5ms to 15ms per ISF (post-train) indicates that the data points flow through the well-trained model with converged accuracies. This assumption follows the real-time data processing and delivery to meet the stringent requirements of 4-VNF per smart city SFC. The simulation models a wide range of SFC request rates, which vary from 100 to 1000 requests per second. The delay on links is constrained to a maximum of 2ms. Within 2000-, 5 different congestion levels are configured to input the high rates of requests and generate large-scale congestion to answer theour research questions. Pytorch is used for building GNN models, and further hyperparameters of GNN, such as learning rate, batch size, number of epochs, dropout rate, and activation function, are set to 0.01, 64, 1000, 0.3, and ReLU-Sigmoid, respectively.
Table 3.
Key simulation parameters.
|
Parameter |
Specifications |
|
Hosting infrastructure |
Intel(R) Xeon(R) Silver 4280 CPU @ 2.10 GHz, 128 GB, NVIDIA Quadro RTX 4000 GPU |
|
Maximum tolerable delay per ISF (post-train) |
5ms to 15ms |
|
SFC request rate |
100/s to 1000/s |
|
Number of VNFs in a single chain |
4 |
|
Delay on links |
≤ 2ms |
|
Simulation timeslot |
2000- (5 congestion-level) |
|
GNN platform |
Python (Pytorch) |
|
Learning Rate |
0.01 |
|
Batch Size |
64 |
|
Number of Epochs |
1000 |
|
Dropout Rate |
0.3 |
|
Activation Function |
ReLU and Sigmoid |
We follow this setting to capture the experiment results. The simulation leverages the GNN-based approach by utilizing a set of parameters and specifications as outlined in Table 3. For further result discussions on this platform setup, please kindly check https://doi.org/10.3390/electronics12194018.