1. Introduction
In recent years, research related to edge computing has gradually received extensive attention from researchers [1][2][1,2]. Vehicular edge computing (VEC), as a part of edge computing, provides real-time service to vehicular users. It has excellent prospects in the fields of intelligent transportation systems, smart city applications, and vehicular applications. As the infrastructure becomes well established, edge servers extend their service coverage to a wider scope. In traffic control, edge computing servers can acquire and regulate real-time traffic. In in-vehicle tasks, edge computing servers can provide high-quality services to users. However, the quality of service (QoS) in VEC still cannot be significantly improved, and one of its bottlenecks is the inefficient task offloading. Traditional task offloading methods are plagued by issues such as significant latency, high time and space complexity, and low transmission quality. To solve the problems of task offloading, trajectory prediction methods are used in the task offloading scheme. For example, tasks which take up a lot of computational resources can be offloaded to other edge servers using predictive-mode multi-hop transmission. Once the vehicle enters the transmission range of the edge server, it obtains the computation results directly [3][4][3,4].2. Vehicular Edge Computing Schemes Related to Trajectory Prediction
2.1. Vehicular Edge Computing
Task offloading in VEC is the process of transmitting the computing task and related parameters from the service requestor to the service providers through Vehicle-To-Vehicle (V2V) and Vehicle-To-Infrastructure (V2I) communications [1]. Saeik et al. [5] summarized the communication issues in task offloading and proposed a novel task offloading scheme that combines edge and cloud resources. An example of vehicular edge computing is shown in Figure 1 below.
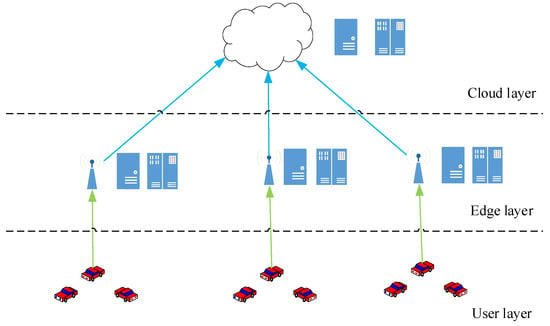
Figure 1.
An example of vehicular edge computing.
The resources of edge servers can be fully utilized to provide better QoS to users via optimizing the task offloading scheme. Zhang et al. [4] presented an efficient predictive combination-mode relegation scheme wherein the tasks are adaptively offloaded to the edge servers through direct uploading or predictive relay transmissions. Zhan et al. [3] converted global task offloading optimization problem into multiple local optimization problems with a heuristic mobility-aware offloading algorithm (HMAOA) to approximate the optimal offloading scheme. Yang et al. [6] proposed a low-complexity semiparametric predictive model that takes into account the periodic characteristics and spatial/temporal correlations of dynamic road events. Although these methods have shown some improvements, they still fail to achieve an optimal balance between efficiency and accuracy in VEC. Therefore, how to predict vehicle trajectories more accurately while ensuring efficiency is a pressing issue in task offloading at this stage.
2.2. Trajectory Prediction
Trajectory prediction problems can be categorized into two types based on different data types, namely continuous trajectory prediction problems and discrete trajectory prediction problems. The continuous trajectory prediction problem is a regression problem. Alahi et al. [7] developed an LSTM model which can learn general human movement and predict their future trajectories. Han et al. [8] proposed a short-term real-time trajectory coordinate point prediction method based on a GRU (Gated Recurrent Unit) cyclic neural network. This method improves the accuracy of real-time forecasting by updating the model parameters in real time. Huang et al. [9] discussed a new traffic network modeling algorithm based on the context of traffic intersections that maps vehicle trajectory nodes into a high-dimensional space vector, so that Bi-GRU can be used to bidirectionally model the trajectory matrix for the purpose of prediction. Amichi et al. [10] designed a two-step predictive framework solely based on personal location data. This framework aims to address the prediction of visits to new places and adjust prediction resolution to account for probable explorations of new locations.
Monreale et al. [11] proposed a T-pattern tree for trajectory prediction. The tree is constructed using trajectory patterns that represent specific areas, and it can serve as a predictor for the next location of a new trajectory by identifying the best-matching path within the tree. Dong et al. [12] put forward a new method named RTMatch to predict the future location of a moving object using the storage structure, RTPT and HT, which can be updated dynamically and provide dynamic analysis of trajectory pattern according to real-time information. Zeng et al. [13] presented a next-location prediction approach based on an RNN and self-attention mechanism to predict trajectory patterns based on a sequence of discrete nodes. Feng et al. [14] proposed DeepMove, an attentional recurrent network for mobility prediction from lengthy and sparse trajectories. DeepMove effectively utilizes the periodicity nature to augment the RNN for mobility prediction. Liu et al. [15] created a geographically temporally awareness hierarchical attention network (GT-HAN) to distinguish different user preferences.
Recent research proves that the Transformer outperforms other deep learning methods in trajectory prediction. Amirloo et al. [16] proposed LatentFormer, a transformer-based model able to predict future vehicle trajectories by leveraging a novel technique to model interactions among dynamic objects in the scene. Accounting for the interaction between vehicles, Yan et al. [17] proposed two spatial attention mechanisms to help the model understand the surrounding environment better and thus improve its prediction accuracy. Yu et al. [18] introduced the Spatio-Temporal grAph tRansformer (STAR) framework, a novel framework for spatio-temporal trajectory prediction based purely on a self-attention mechanism, with TGConv, a Transformer-based graph convolution mechanism. Dai et al. [19] proposed a novel neural architecture, Transformer-XL, which enables learning dependency beyond a fixed length without disrupting temporal coherence. Wang et al. [20] used a low-rank approximation method to approximate a self-attention mechanism, which maintains high performance while reducing the computational cost. Kitaev et al. [21] introduced reversible residual layers that reduce the memory consumption of the model and give the model the ability to handle larger datasets. Kong et al. [22] proposed the Spatial-Temporal Graph Attention Network (STGAT) for traffic flow forecasting. They demonstrated that STGAT can be generalized directly not only to graphs with an arbitrary structure, but also to completely unseen graphs. None of the existing deep-learning-based prediction methods consider the features in VEC. These deep learning methods need a large amount of storage and computational resources. However, edge servers have limited resources, which leads to the fact that these methods cannot be directly applied to VEC.