Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 2 by Fanny Huang and Version 1 by Henrik Nordström.
The use of wind power has grown strongly in recent years and is expected to continue to increase in the coming decades. Solar power is also expected to increase significantly. In a power system, a continuous balance is maintained between total production and demand. This balancing is currently mainly managed with conventional power plants, but with larger amounts of wind and solar power, other sources will also be needed. Interesting possibilities include continuous control of wind and solar power, battery storage, electric vehicles, hydrogen production, and other demand resources with flexibility potential.
- balancing services
- continuous balancing
- wind power
- solar power
- power
1. Introduction
The world’s total annual electricity consumption in 2021 was around 28 466 TWh, of which around 1862 TWh (6.5%) was served by wind power, and 1033 TWh (3.6%) was served by solar power [1]. However, the share of these variable renewable energy (VRE) sources has increased significantly in the last few years. The average yearly growth rate of installed wind power capacity in the years 2011–2021 was 14.1%, while installed solar power capacity increased by 27.9% per year. In the IEA future Net Zero system report, the result is that on a global level, by 2050, “solar PV and wind together account for almost half of electricity supply” [4][2]. By 2050, the electricity supply is also expected to significantly increase, as society becomes increasingly decarbonized. With such a high global share of VRE generation, and considering the variability of VRE resources, this certainly means that in some areas/countries, during some hours, the power system must be able to operate at close to 100% VRE generation, in order to minimize wind and solar curtailments.
One of the main challenges with operating the power system at a very high share of VRE generation is that the continuous balance between production and consumption must be maintained in a reliable and economic manner. At very high shares of VRE, power systems will have to be operated at low levels of inertia [5][3], while imbalances likely will be larger and more frequently occurring, due to the uncertainty and variability of VRE generation, see, e.g., [6,7,8][4][5][6]. Historically, the continuous balance has been maintained by generators adjusting their output according to the power systems’ needs. However, along with the increasing share of VRE generation, there is a parallel development toward more flexible demand resources being available, which can contribute to continuous balancing. These resources include electric vehicles, electric heating systems, batteries, hydrogen production, and demand-side management (both larger consumers, e.g., industries and data centers, and smaller consumers, e.g., households). VRE generation also can contribute to maintaining the continuous balance, in different ways, e.g., [9,10][7][8].
2. Power System Balancing
In a power system, there is always an instantaneous balance between the electric power supplied and consumed. The task of continuous balancing in a power system refers to supplying the demanded power at every time instant. Poor balancing can lead to large frequency changes or transmission line overloading. If the frequency deviates too much from the nominal level (50 Hz in Europe and 60 Hz in North America), or the flow over a transmission line becomes too high, control systems may be triggered. This, in turn, will lead to all demanded power not being supplied. The challenge with continuous balancing is that all components and their operational status in a power system are not predictable and controllable. In order to retain the continuous balance in a power system, a combination of power system planning, efficient handling of margins, equipment’s inherent physical reactions, automated controls, and manual instructions are used.
2.1. Balancing Principles
Strategies used to keep the continuous balance vary between countries and regions in the world. Generally, there are three main types of balancing activities performed at different time frames and at different spatial resolutions in a power system. The combination of these balancing activities forms the balancing principles of a power system. These balancing activities are:
Frequency balancing: Frequency balancing refers to keeping the frequency close to nominal in a synchronous system. The synchronous system is balanced if the frequency is close to the nominal level, with small variations within a certain band being acceptable. The rationale behind frequency balancing is that some power system components are designed to be operated at nominal frequency, and frequency deviations may impact or damage these components. Frequency deviations occur when the rotational energy of synchronous machines increases, or decreases, as the immediate reaction to handle a mismatch between power production and consumption. This mismatch is then compensated by some units having automatic controls changing their power setpoint, which will stabilize the frequency. After a while, frequency is restored by a combination of slower automatic controls and manual actions to change units’ power setpoints.
Power balancing: Power balancing refers to keeping the sum of produced and imported power equal to the sum of consumed and exported power in a certain balancing area. A balancing area is a region operated by one transmission system operator (TSO) (commonly known as Independent System Operator (ISO) in the US and Electricity System Operator (ESO) in Great Britain; however, researchers use the term TSO here when referring to the entity responsible for balancing the power system in real time), and, commonly, a synchronous system consists of many balancing areas. The rationale behind power balancing is to consider transmission constraints within a synchronous system by using resources in the correct location to balance out deviations within dispatch intervals. In each balancing area, power balancing is performed by both proactively and reactively applying a combination of automatic controls and manual actions to change generator power setpoints to mitigate the area control error (ACE). The ACE is calculated as the difference between measured and planned flows to/from the area (ΔP), added with a “frequency bias” term to consider the activation of resources used for frequency balancing based on the regulating strength (K) of frequency reserves in the balancing area and the frequency deviation (Δf) [11][9]. The ACE of a balancing area is calculated according to (1). When the ACE is close to zero, a balancing area is balanced. Just as for frequency, smaller variations within a certain band are deemed acceptable and, hence, automatic or manual actions are not taken.
ACE = ΔP + KΔf,
Energy balancing: Energy balancing refers to power system planning where the anticipated energy demanded in a certain time interval is matched against the anticipated energy supplied. Energy balancing is commonly performed in markets such as day-ahead markets, intraday markets, and real-time markets. These markets vary in the duration of the planning intervals, planning horizon, and spatial resolution. Although power systems are planned to be balanced for certain time intervals in these markets, there remains a need to have more resources to keep the continuous balance. This need is caused by both uncertainties, such as imperfect forecasts of VRE generation unit outages, as well as by imperfect markets not fully considering the variability of VRE generation/demand and ramp restrictions of units in power system planning. The features of energy balancing impact the need for additional resources for continuous balancing, and energy balancing can thus not be neglected. With energy balancing being performed closer to real time and for shorter time intervals, the anticipated conditions for which energy balancing is performed will be more similar to actual conditions. Hence, there will be a reduced need for reserves to perform frequency and power balancing.
2.2. Common Services Contributing to Continuous Balancing
There are a number of services contributing to keeping the continuous balance in power systems by both frequency balancing and power balancing. The types of services, their names, and their requirements are often specific for each TSO and depend on the system’s characteristics. Some services are procured through markets, while others are not remunerated. Here, researchers list a number of common types of services used to keep the continuous balance and describe the purpose of each service. The different types of service are categorized according to the EU SysFlex project [12][10]. The ability to provide services related to voltage control may influence if a technology is used to provide balancing services.
Inertial response: In a power system context, inertia is the rotational energy stored in spinning directly grid-connected electrical machines. When a mismatch between production and consumption occurs, the immediate initial reaction will be an increase or decrease in this rotational energy leading to a change in frequency. This is defined as the inertial response of a power system [12][10]. High inertia resists changes in frequency, and gives other services more time to respond to compensate for the mismatch between production and consumption. With high shares of conventional (so-called grid-following) inverter-based resources, the inertia from spinning machines is reduced. This inertia reduction could impose challenges related to frequency stability in power systems if the size of the largest disturbance is not reduced [5][3]. Recently, a new class of inverter-based resource controls has emerged (so-called grid-forming), which can allow the nearly instantaneous injection of active power in response to a mismatch between production and consumption in the direction resisting changes in frequency. While grid-following inverters assume that frequency and voltage are regulated by synchronous machines and, hence, follow the grid, grid-forming inverters aim to, by the use of advanced controls, provide services traditionally provided by synchronous machines. Provided that a sufficient energy buffer is available behind an inverter, these grid-forming resources can then support the grid in the inertial time frame, similar to spinning machines. If a grid-forming inverter is controlled with a “virtual synchronous machine philosophy”, this technology is known as synthetic inertia.
Fast frequency response: With lower inertia levels, the frequency will change more rapidly following the occurrence of a mismatch between production and consumption. To give other services more time to compensate for this mismatch, fast frequency response services are used. Fast frequency response can be defined as “power injected to, or absorbed from, the grid in response to changes in measured or observed frequency during the arresting phase of a frequency excursion event to improve the frequency nadir or initial rate-of-change of frequency” [14][11]. Fast frequency response services generally react in a time frame faster than 2 s, and can include both existing services from synchronous resources as well as services from new fast-acting non-synchronous resources [12][10]. In systems with high inertia, there is no need to distinguish between fast frequency response and frequency containment reserves, due to frequency containment reserves having sufficient time to react to frequency deviations [14][11].
Frequency containment reserves: Frequency containment reserves have the main objective to compensate for a mismatch between production and consumption to stabilize the frequency [12][10]. Frequency containment reserves shall stabilize the frequency at a stationary level in a synchronous system in a time frame of 5–30 s after a mismatch between production and consumption. However, frequency containment reserves do not aim to restore the frequency to its nominal value. Frequency containment reserves react to frequency deviations in a few seconds within a certain frequency range. Sufficient frequency containment reserves should be available to stabilize the frequency at a level within an acceptable range in the case of a dimensioning incident (a dimensioning incident refers to the loss of the largest single component in a synchronous system in terms of active power).
Frequency restoration reserves: Frequency restoration reserves are used to keep the ACE toward zero in a balancing area and to restore the frequency to its nominal value [12][10]. Frequency restoration reserves may be activated in parallel with frequency containment reserves, and it is thus important that the frequency restoration reserves do not impair the frequency containment reserves. Frequency restoration reserves are commonly based on automatic generation control (AGC) using either the frequency deviation or the ACE as a setpoint. The full activation time of frequency restoration reserves generally varies within a time frame from 30 s to 15 min [12][10]. Frequency restoration reserves can also be manually activated.
Replacement reserves: Replacement reserves are used to replace fast frequency response, frequency containment reserves, and frequency restoration reserves when the system is in a balanced situation, to prepare these services to be activated again [12][10]. Replacement reserves may also be used as a complement to frequency restoration reserves when restoring the frequency after a larger disturbance. Replacement reserves generally act in a time frame from 15 to 60 min after a disturbance [12][10]. Replacement reserves are most often activated manually by a TSO when activation of frequency restoration reserves is either expected (scheduled activation of replacement reserves) or observed (direct activation of replacement reserves). Replacement reserves are generally a slower balancing service operating during a longer time frame compared to frequency restoration reserves.
Ramping products: Ramping products are online resources being able to decrease or increase the active power output over a specific time horizon for a certain time duration, to maintain supply, and demand balance in the case of net load ramps [12][10]. These net load ramps can both be unforeseen (such as unforecasted wind and solar production) or predictable (such as sunrise and sunset). Some ramping products act in time frames shorter than 15 min, while others act in longer time frames between 1 and 8 h. The motivation behind holding ramping products varies between time frames, whereby, in some systems, ramping products are needed to ensure the availability of certain technical capabilities not provided by shorter time frame balancing services. In other systems, ramping products are instead used to deal with market design failures, as the markets used for energy balancing fail to bring conventional generation online in sufficient time for it to deal with the net load ramps.
2.3. How to Achieve Sufficient Balancing Services?
Given the portfolio of balancing services available in a power system, it is the task of TSOs to determine how much of each balancing service must be available to keep the continuous balance in a reliable manner. The criterion for how to determine the sufficient volumes varies between TSOs, and includes both static (for a longer time frame, e.g., a year), as well as dynamic dimensioning methods (for a shorter time frame, e.g., a day). Before the real-time operation, TSOs must then acquire the needed balancing services. The process of acquiring balancing services can either be an independent process or a process in co-optimization with other parts of the short-term power system operation planning, such as clearing the day-ahead market. To ensure sufficient balancing services will be available, TSOs rely on different mechanisms to incentivize, or oblige, market actors to provide balancing services. Some common mechanisms are as follows:
Grid codes: in some systems, there are regulations, called grid codes, which make it compulsory for a power plant owner to keep certain margins, or to offer certain services, to be allowed to be connected to the transmission network.
Cost remuneration: an alternative mechanism is to require a technology to keep certain margins and have control systems available, but the technology is economically compensated, as it cannot be operated in a cost-optimal way from the owner’s perspective.
Tender system—capacity: This implies a system where the TSO procures the availability of a certain balancing service in a market. Owners of various technologies are then free to provide offers in this market, based on the costs of keeping sufficient margins and having control systems available. The least-cost offers will be accepted until the TSO’s needs are met. The market players who had their offer accepted then need to plan their real-time dispatch, such that the balancing service, can be activated if given a certain trigger signal.
Tender system—energy: This means that the TSO procures the activation of a certain balancing service in a market. Owners of various technologies are then free to provide offers in this market, based on the cost of changing their output level, such that the balancing service is provided. The least-cost offers will be accepted until the TSO’s needs are met. The market players who had their offer accepted then need to increase or decrease their output in a manner that complies with the technical regulations of the specific balancing service.
2.4. Technology Options for Continuous Balancing
Technologies that are able to provide continuous balancing services can be categorized into generation, demand, electrical storage, and transmission. They must have a reaction time suitable for the particular balancing service. They have upward and/or downward capacity limits, which means that they must keep a margin, in order to be controllable in upward or downward directions. Most technologies have relevant ramp rate restrictions, i.e., how fast the technology can change its output. There is also a need for an observation and control system to execute balancing based on local signals (frequency and/or voltage), as well as communication systems that can trigger not only locally measured balancing commands, but also can enable new setpoints for the local controls.
Figure 1 shows the potential of different technologies to provide intra-hour balancing services. A notable difference is that while the synchronously connected generators (four top rows) provide physical inertia, they also tend to be slower in starting up, or in ramping from minimum load to full capacity, than inverter and resistor loads. From the synchronously connected machines, hydro power plants stand out, since they are not restricted by the thermal stresses that turbine plants must manage. Hydro power still has limits, since valves need to be opened, and water flows need to be managed. Electric motor-driven applications (synchronous and non-synchronous) can ramp their consumption fast depending on the processes these motors are driving. Fuel cells and electrolyzers are other groups with somewhat slower ramping and start-up capabilities. Their limitations are caused by the management of gas and liquid flows, as well as thermal stresses. These limitations are technology-specific, as there are many different fuel cell and electrolyzer types.
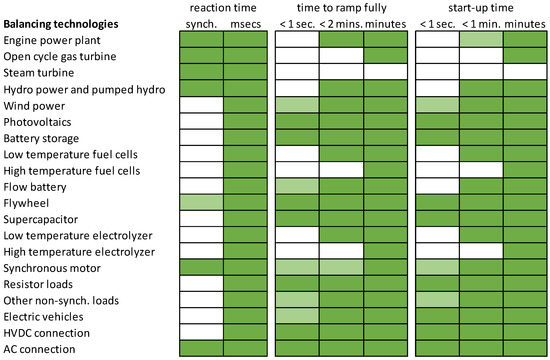
Figure 1. Potential performance of different technologies that can participate in the continuous balancing of power systems. Reaction time is the time for initial response for units in operation, while start-up time refers to the time it takes to start up an offline unit. Lighter green indicates a dependency on a specific technology, while darker green indicates capability in prevalent technologies. The figure is a rough compilation of the work in [15,16,17,18,19,20].
References
- BP. Statistical Review of World Energy. 2022. Available online: https://www.bp.com/content/dam/bp/business-sites/en/global/corporate/pdfs/energy-economics/statistical-review/bp-stats-review-2022-full-report.pdf (accessed on 29 March 2023).
- IEA—International Energy Agency. Net Zero by 2050—A Roadmap for the Global Energy Sector. 2021. Available online: https://iea.blob.core.windows.net/assets/405543d2-054d-4cbd-9b89-d174831643a4/NetZeroby2050-ARoadmapfortheGlobalEnergySector_CORR.pdf (accessed on 29 May 2023).
- Denholm, P.; Trieu, M.; Wallace Kenyon, R.; Kroposki, B.; O’Malley, M. Inertia and the Power Grid: A Guide without the Spin; National Renewable Energy Laboratory: Golden, CO, USA, 2020.
- Hirth, L.; Ziegenhagen, I. Balancing power and variable renewables: Three links. Renew. Sustain. Energy Rev. 2015, 50, 1033–1051.
- Miettinen, J.; Holttinen, H. Impacts of wind power forecast errors on the real-time balancing need: A Nordic case study. IET Renew. Power Gener. 2019, 13, 227–233.
- Kanellas, P.; Das, K.; Gea-Bermudez, J. Modeling the intra-hour power system balancing of the Danish power system for 2020, 2030 & 2050. In Proceedings of the 18th International Wind Integration Workshop, Dublin, Ireland, 16–18 October 2019.
- Martín-Martínez, S.; Lorenzo-Bonache, A.; Honrubia-Escribano, A.; Cañas-Carretón, M.; Gómez-Lázaro, E. Contribution of wind energy to balancing markets: The case of Spain. WIREs Energy Environ. 2018, 7, e300.
- Algarvio, H.; Lopes, F.; Couto, A.; Estanqueiro, A. Participation of wind power producers in day-ahead and balancing markets: An overview and a simulation-based study. WIREs Energy Environ. 2019, 8, e343.
- ENTSO-E. P1—Policy 1: Load-Frequency Control and Performance; ENTSO-E: Brussels, Belgium, 2009.
- EU-SysFlex. Product Definition for Innovative System Services. 2019. Available online: https://eu-sysflex.com/wp-content/uploads/2019/08/D3.1_Final_Submitted.pdf (accessed on 13 April 2022).
- NERC Inverter-Based Resources Performance Task Force. Fast Frequency Response Concepts and Bulk Power System Reliability Needs; North American Electric Reliability Corporation: Atlanta, GA, USA, 2020.
More