Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 1 by Xing Yang and Version 2 by Camila Xu.
The Solar Insecticidal Lamp Internet of Things (SIL-IoTs) is an emerging paradigm that extends Internet of Things (IoT) technology to agricultural-enabled electronic devices. Ensuring the dependability and safety of SIL-IoTs is crucial for pest monitoring, prediction, and prevention.
- distributed fault detection
- solar insecticidal lamps internet of things
1. Introduction
The solar insecticidal lamp (SIL) has gained widespread adoption in agricultural pest management and control, offering an environmentally friendly approach to pest control. Recent advancements in IoT technology have enabled SILs to expand their functionalities and improve operational life through pest monitoring, pest outbreak area positioning, and energy optimization in battery-powered devices [1]. Yang et al. [2] have indicated that the fixed effective killing distance of SIL ranges from 50 to 110 m, which falls within the communication range of ZigBee. Leveraging this characteristic, SIL-IoTs nodes can collect and transmit data related to pest statistics (e.g., the number of pests killed in a short period of time), component status information (e.g., voltage and current values of various components), and meteorological environment information to the back-end system via the network [3]. This data transmission allows farmers to accurately use pesticides in areas with varying pest populations, therefore avoiding excessive pesticide usage, as shown in Table 1. Moreover, IoT devices facilitate continuous and remote monitoring of SIL-IoTs’ component status, enabling timely failure reporting and improving the reliability and data quality of SIL-IoTs.
Table 1.
Comparison of SIL and SIL-IoTs node.
| SIL | SIL-IoTs | |
|---|---|---|
| Price | CNY 1100 (about $160) | CNY 1500 (about $219) |
| Function | Harvest energy Kill pest |
SIL’s functions Count killed pests Monitor component status Monitor environment |
| Advantage | Cheap Easy to use |
Provide farmers with killed pest statistics for targeted pesticide usage Detect faults timely to ensure reliability of SIL-IoTs |
| Drawback | Inability to perceive information | Expensive price |
Figure 1 illustrates some key elements and functionalities of a typical SIL-IoTs node. Among other core components, sensors are used to further embed various intelligence capabilities into the SIL-IoTs node. For example, a solar energy system allows the SIL-IoTs node to be charged during the day, while at night it is programmed to automatically attract pests. A metal mesh is used to kill pests (by contact) by discharging a sudden high-voltage pulse. During this process, several intelligent sensors monitor environmental conditions, calculate the number of pests killed and determine the operating status of the modules. During rainy periods, the SIL-IoTs switch to sleep mode by turning off the lure lamp and metal mesh to prevent damage and save energy.
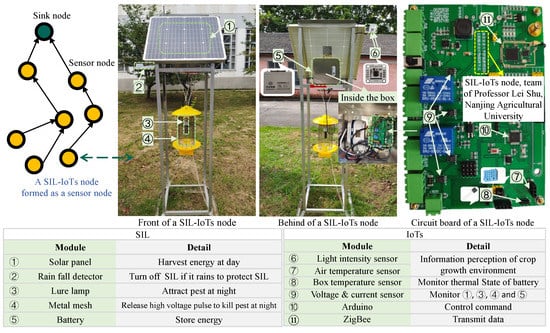
Figure 1. An example of a SIL-IoTs node, where a temperature sensor inside an electrical box is used to monitor the thermal state of the battery and IoTs devices. The light intensity sensor is used to monitor the condition of solar panels. More details can be seen from [4].
Typically, SIL-IoTs nodes are geographically dispersed and deployed in an unattended and harsh environment. Inevitably, the SIL-IoTs nodes are susceptible to aging, theft, and vandalism [5]. According to several relevant literature [6], there have been 19 related news reports of SIL failures in the past 20 years, and a total of more than 7000 SILs have been abandoned due to insufficient fault detection and maintenance work, which is not conducive to the promotion of products and the establishment of user confidence.
The above issues result in faulty conditions and abnormal operation of SIL-IoTs nodes, which affect the operational capabilities and overall performance of SIL-IoTs. For instance, if the energy harvesting system fails (causing the solar panel to continuously charge the battery without a control mechanism), the battery will eventually heat up and cause performance degradation, or even explode and cause damage to SIL-IoTs nodes. In addition, the deployment of SIL-IoTs nodes in remote locations makes real-time inspection and maintenance difficult. Therefore, it is a challenging task (to monitor and detect the SIL-IoTs node faults) to ensure adequate and efficient operation throughout the lifecycle. If there is an adequate provision of computational capacity and energy, traditional approaches can provide good detection performance in terms of real-time response, data loss prevention, and less data transmission [7][8][7,8].
2. A Lightweight Fault-Detection Scheme for Resource-Constrained Solar Insecticidal Lamp IoTs
Fault detection and prediction are critical to enabling proactive intelligent device health management [9][10][9,10]. A well-established approach is to detect faults in a centralized manner at the server level, which requires periodic collection of information from all nodes (i.e., each SIL-IoTs periodically transmits to the data collection server) and performing inference processes at the back end [7]. For instance, the connectivity metrics of all the nodes are transmitted to the back end and the root causes are troubleshot using a decision tree [11]. Tang et al. [12] proposed a neighborhood hidden conditional random field method to monitor the health of wireless sensor networks. The posterior probability of different faulty states is estimated and used to classify faults at the back end. As shown in Table 2, unlike established and traditional IoT applications, SIL-IoTs devices are mainly characterized by (1) limited on-board storage and computing capacity, (2) remote deployment locations with poor network conditions, and (3) deployment to cover a large geographical area. Due to the high communication overhead and detection delay caused by multi-hop data transmission, this approach is not efficient in terms of both overall detection performance and resource allocation (i.e., devices are battery-powered and therefore have limited energy). Although Yang et al. [4] has proposed a scheme for fault self-inspection in the Arduino chip of SIL-IoTs, the scheme does not take into account the information interaction between nodes, and further analysis cannot be performed for some fault situations, such as the mismatch between the current and light intensity of the solar panel.Table 2.
Comparison of research related to distributed fault detection.
| Ref. | Scenario | Implement | Method | Deployment Density | Battery-Powered | Lightweight Design | Energy Consumption |
|---|---|---|---|---|---|---|---|
| [13] | Printer systems | Sensor node | Consistency check | N/A | N/A | N/A | N/A |
| [14] | WSNs | Simulation | Dual thresholds detection | 1024/32 × 32 units | N/A | N/A | N/A |
| [15] | WSNs | Simulation | Improved dual thresholds detection | 200/30 × 30 units | N/A | N/A | N/A |
| [7] | Canopy closure monitoring sensors | MSP430 | Cumulative sum sliding window | 200/2 × 106× 106 m22 | ✓ | N/A | N/A |
| [16] | WSNs | Simulation | Improved 3-𝜎� test | 1024/1 × 106× 106 m22 | ✓ | N/A | N/A |
| [17] | Industrial control systems | Simulation | Genetic algorithms | N/A | N/A | N/A | N/A |
| [18] | WSNs | Simulation | Support vector machines | 200/30 × 30 units | N/A | N/A | N/A |
| [19] | WSNs | Simulation | Dual thresholds detection | 1024/2.62 × 105× 105 m22 | N/A | N/A | N/A |
| [20] | Infrared sensors | Arduino | Exponential smoothing | N/A | ✓ | ✓ | N/A |
| [21] | WSNs | Simulation | Exponential smoothing and median value detection | N/A | ✓ | ✓ | N/A |
| Our | Arduino | Quantile method and residual test | 7/2.72 × 105× 105 m22 | ✓ | ✓ | ✓ |