Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 1 by A. Javier Mazon and Version 2 by Dean Liu.
Electric machines are important devices that convert electrical energy into mechanical energy and are extensively used in a wide range of applications.
- electric machine
- electromagnetic noise
- induction motor
- permanent magnet motor (PMM)
- axial flux motor (AFM)
1. Mechanical and Aerodynamic Noise
Several authors have analyzed the aerodynamic noise in electric motors [1][2][3][5,6,7]. It is expected that the noise level will increase as the speed of the motor’s cooling fan increases. According to [2][6], electromagnetic noise is more dominant at low speeds, while aerodynamic noise is more dominant at high speeds. To demonstrate this, the motors are slowly run up to 3300 rpm and the sound pressure is measured. The same measurement is repeated once the motor is running at 3300 rpm, but with the power turned off.
This type of noise is unaffected by motor load. The level of aerodynamic noise remains the same whether the motor is running at full load or with no load at all.
The International Electrotechnical Commission (IEC) has defined the degree of protection against mechanical damage and environmental factors, such as moisture or corrosive vapors, in the standard IEC60034-5. The designation for the degree of protection is denoted by the letters “IP” followed by two numbers. For example, a motor labeled as IP23 indicates that it is open to the surrounding environment, while a motor designated as IP55 suggests that it is enclosed and protected. In this regard, noise levels differ depending on whether the motor is open (IP23) or closed (IP55). The ventilation noise emitted by open motors is significantly higher than that of closed motors, as the rotor generates less noise when enclosed. This also applies to noise generated within the motor, whether of electromagnetic or mechanical origin. Therefore, in order to minimize noise levels, it is recommended to design motors that are as closed as possible (IP55).
There are several sources of mechanical noise, such as bearings, eccentricity between rotor and stator, and mechanical unbalance. In [4][8], the influence of manufacturing tolerances has even been analyzed. It should be noted that the noise caused by rotor eccentricity can also be considered as a type of electromagnetic noise, since the imbalance of electromagnetic forces caused by the eccentricity leads to increased noise.
In [5][6][7][9,10,11] the influence of rotor eccentricity on motor noise has been analyzed. According to [7][11], four types of eccentricities are distinguished (as can be seen in Figure 1):
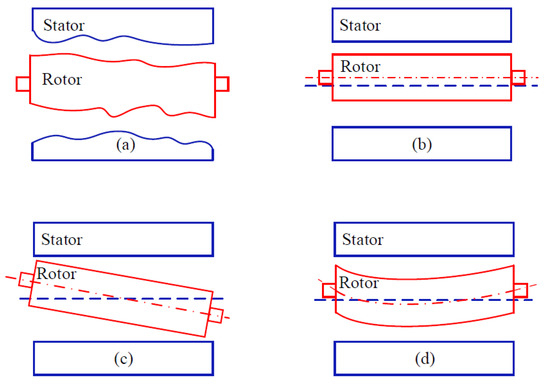
Figure 1.
Main mechanical sources of air gap eccentricity: (
a
) shape deviation, (
b
) parallel eccentricity, (
c
) inclined eccentricity and (
d) curved eccentricity [7].
When the stator and rotor are not regular cylinders, their shape deviation can produce air gap eccentricity, as in Figure 1a. Another very important, and widely analyzed, type of air gap eccentricity is that the rotor axis does not coincide with the stator axis, as in Figure 1b–d. When the rotor axis is straight, the eccentricity can be divided into parallel eccentricity, Figure 1b, and inclined eccentricity, Figure 1c. When the rotor shaft is bent, the eccentricity type is called curved, as in Figure 1d.
Test measurements [5][6][9,10] demonstrate that eccentricities between rotor and stator lead to an increase in the noise level generated by motors. Another interesting conclusion obtained by [8][12] is that the minimum achievable noise is highly dependent on the eccentricity value, but the dimensions required for the motor to have the lowest noise level are independent of any type of eccentricity.
2. Electromagnetic Noise
Electromagnetic fields result in forces that cause structural vibrations. The magnitude of the vibrations depends on the amplitudes and especially on the frequencies of the forces, and they must not coincide with the natural frequencies of the system. These surface oscillations then cause a conversion from vibrational energy to sound energy.
2.1. Electromagnetic Forces
There are two types of forces behind noise of electromagnetic origin occurring in electrical machines: magnetostriction forces and Maxwell forces. In radial-flow rotating machines, the main structural modes of interest for acoustic noise are those that involved radial vibration waves of the yoke (circumferential modes), which are generally the most efficient ones for radiating acoustic noise. Both magnetostriction and Maxwell forces can generate radial deflections of the stator yoke [9][13]. According to [10][2], obtained from Maxwell’s Tensor, the radial magnetic forces per unit area are given by Equation (4):
where F is the force per unit area, Br is the radial component of the magnetic flux, Bt is the tangential component and µ0 is the magnetic permeability of the vacuum.
The radial force generated within the motor induces vibrations in the stator, which subsequently result in the emission of noise by the motor to its surroundings.
There are many references that analyze the forces of electromagnetic origin [11][12][13][14][15][16][17][18][19][20][14,15,16,17,18,19,20,21,22,23] but, in most publications, it is common to neglect the tangential component, since it is much smaller than the radial component. In contrast, the authors of [13][16] show that this assumption is not always valid and that, when the orders of the harmonics of the radial and tangential field are the same, ignoring the tangential component can change the amplitude of these harmonics. According to [20][23], neglecting the tangential component results in a calculation error that can be about 2 dB. These tangential forces have a greater influence when the ratio of stator yoke to tooth length is small. Therefore, it must be taken into account in machines with high pole pairs.
2.2. Natural Frequencies and Vibration Modes
It is crucial to consider both force frequencies and natural frequencies of the stator system when designing electric rotating machinery because, as mentioned in [1][5], the vibration and resulting noise level are at their highest when the frequency of the magnetic force is equal or close to the natural frequency of the stator system.
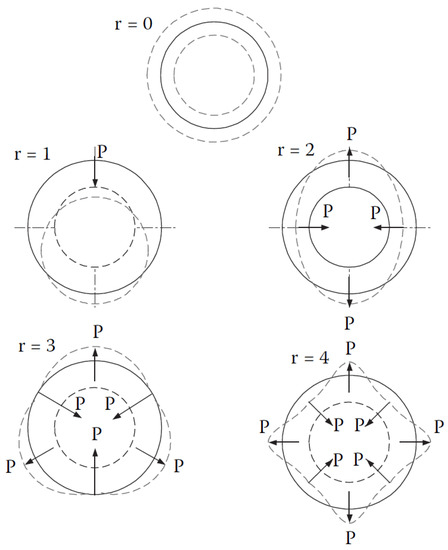
Natural frequencies are associated with different vibration modes (0, 1, 2, ...) and the lower modes are the ones that contribute the most to the increase in electromagnetic noise. Figure 2 shows the spatial distribution of forces producing vibration modes of different orders (r = 0, 1, 2, 3, 4).
Generally, the mode of the force has the greatest impact on vibration and noise behavior, followed by the frequency of the force, and lastly the amplitude of the force [21][24].
Typically, natural frequencies of the motor stator are calculated without considering the influence of its winding. However, the author of [22][25] was one of the first researchers to analyze the impact of winding and different varnishes used in stator impregnation on natural frequency.
Since natural frequency is associated with the mechanical stiffness of the stator, some authors have investigated the influence of different magnetic sheet materials on motor noise emission. In [23][26], the effect of grain-oriented versus non-grain-oriented magnetic sheet on squirrel cage motor stator construction was analyzed, concluding that grain-oriented magnetic sheets produce lower noise.
Additionally, when the motor is in thermal equilibrium, the stator temperature is higher during continuous operation than at rest, and this temperature difference can affect its natural frequency [24][27].
Finally, it is worth mentioning that neglecting the influence of motor endshields on the natural frequency of the system may result in errors of up to 25% [25][28].
2.3. Power Supply Control of the Electric Motor
The use of electric motors fed by variable frequency drives is becoming more common, often replacing hydraulic motors. However, since these motors are not fed with sine waves, they tend to generate higher levels of noise [4][26][27][28][8,29,30,31].
One of the most analyzed parameters by researchers is the switching frequency. In [29][30][32,33], the noise emitted by the same motor is analyzed when different switching frequencies of the frequency converter are used. At low frequencies, a higher switching frequency results in lower machine noise, but for high frequency operation (100 Hz) the differences are negligible.
Space Vector PWM (SVPWM) technique is the most widely used power supply strategy in variable frequency drives because of its reduced harmonic distortion (THD) [31][34]. However, one of the main disadvantages of this technique is that harmonics and noise are concentrated around the inverter switching frequency value and its multiples [32][33][35,36].
If the frequency of these harmonics coincides with the natural frequency of the motor, the noise will increase considerably. Therefore, from the early stages of design, it is convenient to pay special attention to the vibration modes and natural frequencies, as explained in the previous section.
Recently, the trend has been to look for other power supply methods, different from SVPWM, that achieve noise reduction [34][37]. For example, the authors of [35][38] present a triangular modulated signal to reduce noise versus the traditional PWM. The difference of the triangular periodic frequency carrier compared to the traditional PWM is that the switching frequency is variable and, with a variable switching frequency signal, a sinusoidal signal with lower harmonic distortion is obtained.
In addition, the authors of [36][3] discuss different power supply techniques within the triangular signals. All of them are difficult to be applied in standard variable frequency drives.
2.4. Winding Influence
The influence of the winding type on noise generation in electric motors has been extensively researched over the years, considering different options such as single and double layer windings, fractional and integer windings, concentric and concentrated windings and, finally, the winding pitch.
In [37][38][39][39,40,41], the difference between single- and double-layer windings is analyzed, and the main conclusion is that double layer windings perform better against noise generation. Furthermore, according to [5][9], the higher the number of parallel paths in the winding, the lower the noise produced by the motors.
Regarding integer or fractional windings, different winding configurations for a 20-pole magnet machine are analyzed in [39][41]. In fact, one integer and 4 fractional winding configurations are analyzed. One of its conclusions is that fractional windings present a greater imbalance in the radial magnetic forces in the air gap. Alternatively, the most significant force in permanent magnet motors (PMMs) with integer windings is the 0-order force, whereas in PMMs with fractional windings is the lowest non-zero-order force [40][42].
As for concentrated windings, these types of windings present greater problems from the noise and vibration point of view than distributed windings [41][43] (such as concentric windings). The high harmonic content of the magnetomotive force is the source of the problems.
In [42][44], the authors propose a new star-delta connected concentric winding configuration, reducing the noise level by 10 dB(A). Finally, the author of [43][45] shows that short-pitched windings have a lower noise level than windings without shortened pitch.
2.5. Noise in Induction Motors
In the case of induction motors, the magnetic field is generated by the stator, which induces a magnetic field in the rotor following the one generated by the stator. Regarding the harmonics present in squirrel cage motors, these can be reduced to three families [44][46]: slotting force harmonics, “winding force” harmonics, and saturation force harmonics.
Therefore, the design of the stator and rotor slots directly affects the harmonics and acoustic characteristics of the motors. For example, closed rotor slots result in lower noise levels [45][47] since rotor slotting force harmonics are partially eliminated.
For many years, the stator–rotor slot combination, and its influence on slot harmonics, has been a widely studied parameter in squirrel-cage motors. The proper selection of the number of stator and rotor slots for noise reduction was first proposed by [46][48]. In recent times, the authors of [47][49] have presented updated rules and a compilation of previously published research. The number of poles is another aspect related to the number of slots. According to [48][50], the higher the number of poles, the higher the electromagnetic noise will be.
One of the major advantages of squirrel cage motors fed by frequency inverters is their wide speed range. However, as this range increases, it is inevitable that the speed coincides, or at least passes through, a structural mode of the machine, making it possible for resonances to appear [43][45].
Furthermore, as discussed in Section 3.2.1, neglecting the tangential component may lead to errors in the calculation of the noise level in squirrel cage motors [20][23].
Another important aspect in induction motors is the influence that temperature has on the noise emitted. In this regard, the authors of [2][6] conclude that there is a temperature dependence and, as the temperature of the motor increases, both the natural frequency of the eigenmode and the amplitude of the sound pressure level decrease.
2.6. Noise in PMMs
In the case of PMMs, the magnetic field is generated by the magnets of the rotor following the rotating magnetic field generated by the stator. Within the topology of permanent magnet synchronous motors there are mainly two types, depending on where the magnets are placed: Surface Permanent Magnet motors (SPM) and Interior Permanent Magnet motors (IPM).
A review on vibration and noise in PMMs with concentrated windings is presented in [41][43]. Among the two synchronous motor topologies mentioned above, the IPM emits higher noise when the winding is concentrated [49][51].
Unlike in induction motors, the cogging torque that is generated by the interaction between the magnets and the magnetic sheet of the stator has to be taken into account in PMMs. Having said that, low cogging torque does not necessarily imply that the motor is less noisy [50][52].
As in squirrel-cage motors, neglecting tangential versus radial forces can lead to errors in obtaining the noise level [51][53].
For the same number of poles, increasing the number of slots increases the harmonic amplitudes. As a consequence, configurations with a lower number of slots will be less noisy, as long as the mechanical configuration is similar [52][54].
The influence of the shape of magnets on the noise emitted by electric motors is something worth considering. Researchers such as [53][55] have analyzed the impact of the magnet edge shape on the magnetic force and its frequency components. Modifying the edge of the magnet can shift the frequencies to higher orders of the frequency spectrum, reducing the acoustic level. However, this is only effective if the new frequencies do not coincide with any natural frequency of the system. Furthermore, this same effect can be achieved by acting on the pole shape [54][56], in particular, on the pole width. The forces in the air gap are reduced by enlarging the air gap at the ends of the tooth tips.