Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 3 by Camila Xu and Version 5 by Camila Xu.
The time-sensitive networking (TSN) family of standards is a tool set that offers reliability, determinism and time synchronization for safety-critical automotive communications over Ethernet links. The TSN standards leverage the previous work conducted within the IEEE 802.1 Working Group on IEEE audio video bridging (AVB). TSN is a set of specifications standardized by the Institute of Electrical and Electronics Engineers (IEEE) 802.1 work group (WG), the predecessor of which is audio video bridging (AVB).
- time-sensitive networking (TSN)
- intelligent driving
- deterministic networks
1. Introduction
The structure of traditional automobile network is relatively simple, where a controller connects with devices in its domain and different controllers do not interfere with each other. With the increase in user demands on various functionalities, the number of electrical control units (ECUs) of automobiles has gradually increased. Information exchange between ECUs has become more complicated and requires high bandwidth. In addition, with the popularization of the automatic data acquisition system (ADAS) for intelligent driving, more and more sensors, cameras and entertainment systems are being integrated into automobiles, which place higher performance requirements on the certainty, latency and jitter of automobile networks. Ethernet has a simple connection mechanism and protocol operation, which can provide 10 G, even 100 G, bandwidth for data transmission. Compared with traditional solutions, such as controller area network (CAN) [1], local interconnect network (LIN) [2], media-oriented system transport (MOST) [3] and FlexRay [4], Ethernet is a promising solution to in-vehicle networks and is more likely to be dominant. However, the definition of Ethernet fundamentally lacks attributes to guarantee deterministic, low-latency and jitter data transmission for time-sensitive and critical applications. Thereby, new networking techniques need to be studied to further develop Ethernet for automobile networks.
The TSN family of standards is a tool set that offers reliability, determinism and time synchronization for safety-critical automotive communications over Ethernet links. The TSN standards leverage the previous work conducted within the IEEE 802.1 Working Group on IEEE audio video bridging (AVB). TSN is a set of specifications standardized by the Institute of Electrical and Electronics Engineers (IEEE) 802.1 work group (WG), the predecessor of which is audio video bridging (AVB) [5]. AVB was firstly specified to support the real-time transmission of audio/video (A/V) traffic, which includes synchronization specification, simple resource reservation and scheduling specifications. As more time-sensitive applications emerge, AVB standards are not only used for A/V transmissions but also to manufacture automation, automotive, mobile communication network front haul, etc. [6][7]. Thus, EEE 802.1 WG renames AVB as TSN to better reflect the expanded scope and issues more specifications to improve the real-time capability and reliability of Ethernet. Nowadays, TSN provides various synchronization, resource reservation, queuing and scheduling, control and configuration, certainty, security and safety mechanisms. Updated versions and new specifications are still being developed. In addition to standards, both industry and academia also pay attention to the study of TSN, which are usually in terms of the following fields. Firstly, the time-synchronization designs are investigated, which make network devices synchronized to a reference clock with the accuracy between 1 µs and 10 ns. Secondly, resource-management schemes are designed, which reserve bandwidth for critical time-sensitive traffic with guaranteed latency. To further provide the bounded latency, some queuing and forwarding schemes are investigated, which give priority for critical traffic, while trying to reduce the side effects on general traffic to coexist with them. Thirdly, centralized, distributed, hybrid configuration models and configuration languages are studied to provide static or dynamic control on the synchronization, resource management and scheduling. Finally, security and certainty guaranteed schemes are studied, such as filtering, redundancy provision, link aggregation, etc.
2. TSN Related Standards
Enabling time-sensitive and deterministic vehicle networks is systematic engineering, which refers to multiple layers with mutual cooperation. For applications of local area network (LAN), most specifications focus on the data link layer (Layer 2, mainly standardized by IEEE 802.1 TSN [8] group) based on switched Ethernet. IEEE 802.3 WG pays attention to the corresponding Ethernet physical layer (PHY) technique. IETF deterministic networking (DetNet) WG cooperates with the IEEE 802.1 TSN group, which provides the network layer (Layer 3) solution to deterministic routing. In addition, IETF defines the general architecture for Layers 2 and 3. OA focuses on the test standardization of TSN. There are several differences and similarities between these two standards. The main difference between DetNet and TSN is the layering in the OSI model. DetNet operates on the Layer 3 protocols, whereas TSN is confined to Layer 2. The data plane of these standards is also different. DetNet nodes can connect to other subnetworks, such as the optical transport network (OTN) and MPLS Traffic Engineering. TSN cannot achieve multi-layer systems, while DetNet can. However, TSN and DetNet share the same features, such as time synchronization, frame replication and elimination. The first is PHY transmission-related standards. The second subsection is the TSN protocol related to the scheduling and configuration of the data link layer. The third subsection is divided into the standards for the DetNet network. This section is the TSN protocol of the third layer standardized by the IETF. The fourth subsection is the vehicle TSN testing standard developed by OA.2.1. PHY-Related Standards
Automotive TSN networks based on Ethernet PHY usually use a single-pair twisted pair to reduce the cable weight. The transmission rate can support from 10 Mb/s to 10 Gb/s. There are three related specifications as compared in Table 1.Table 1. Related PHY specifications.
| Supported Rate | State | Character | Content | |
|---|---|---|---|---|
| IEEE 802.3bw [9] | 100 Mb/s | Published | Reduces the number of wires |
Provides 100 Mb/s PHY specifications and management parameters for operation on a single balanced twisted-pair copper cable |
| IEEE P802.3cg |
2.2. MAC Related Standards
Traditional Ethernet technology cannot satisfy the real-time synchronous transmission of data in audio and video networks. Therefore, the IEEE 802.1 working group established the AVB working group in 2005. Based on the existing Ethernet system, a series of new standards provide service quality guarantee for the transmission of audio and video streaming data through clock synchronization, bandwidth guarantee and traffic shaping. These standards are summarized in this subsection. Table 2 lists the TSN standard classifications and their applications.Table 2. Application of TSN standards to intelligent driving applications.
| Standard | Functionalities | Application Fields of Intelligent Driving | ||||
|---|---|---|---|---|---|---|
| IEEE802.1AS [13]/ASrev [14] | Time and Synchronization | Information fusion | ||||
| [10] | 10 Mb/s | |||||
| IEEE802.1Qbu | Published | [15] and IEEE802.3br [16] | Reduces the number | Frame preemption |
Key information transmission such as brakingof wires | Supports 10 Mb/s single-pair Ethernet operation in automotive environments |
| IEEE P802.3ch [11] | 10.00 Gb/s | Published | Provides asymmetrical data rates |
Provides greater than 1 Gb/s PHY specifications and management parameters for media and operating conditions for applications in the automotive environment |
| IEEE802.1Qav | ||
| [17]/Qbv [18] Qch [19]/Qcr [20] |
Forwarding and queuing | Traffic scheduling for time-sensitive traffic such as video, controlling signal |
| IEEE802.1Qca [21]/Qat [22] | Resource reservation | Guaranteed transmission for time-sensitive traffic |
| IEEE802.1Qcc [23] | Network configuration | Configuration for synchronization among devices, scheduling and resource allocation for traffic |
| IEEE802.1Qci [24] | Inspection and Security | Automotive remote diagnosis, security of driving |
| IEEE802.1CB [25] | Frame replication and elimination | Providing redundancy information transmission of key information transmission |
2.3. Layer 3 Related Standards
Layer 3 networking for the QoS guarantee (also called as DetNet networking) is standardized by IETF, which collaborates with TSN WG to provide flows with extremely low packet loss rates, an upper bound of the out-of-order packet delivery and assured maximum end-to-end delivery latency. Three techniques are used for providing these QoS requirements, i.e., resource allocation, service protection and explicit routes [26]. In general, DetNet focuses on extending the TSN data and control plane into the Layer 3 domain, thus expanding the scope of TSN beyond LANs. For automotive applications, this explanation is useful for deterministic vehicle-to-everything (V2X) transmission.
 For the TSN demo set up, the above functions are expected to be examined and displayed. Here, a demo setup for some typical functions is given, such as that of 802.1AS, 802.1Qbv, and 802.1CB, which is shown in Figure 2.
For the TSN demo set up, the above functions are expected to be examined and displayed. Here, a demo setup for some typical functions is given, such as that of 802.1AS, 802.1Qbv, and 802.1CB, which is shown in Figure 2.
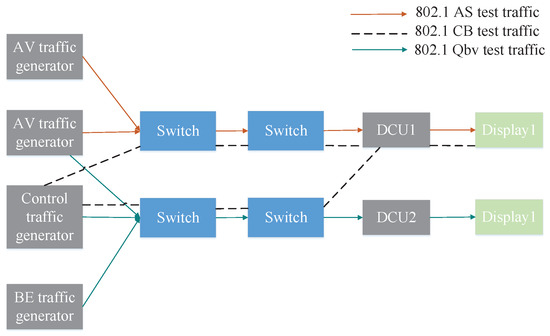 As shown in this figure, synchronization is examined by observing whether two A/V traffic generators are synchronized or not. They can be two AVB cameras recording the same view. In Display 1, it shows the views of two cameras, respectively. When they are synchronized, the displayed views of the two cameras are the same. This is an intuitive show. More accurately, it can be tested by using time-record software. Two cameras photograph the software with the time display and transmit them to DCU 1. Then, whether the transmitted pictures with time are the same or not can be seen. 802.1Qbv [18] is checked by using three traffic generators, i.e., A/V traffic, best-effort traffic and control traffic. With the interfering traffic (BE traffic and A/V traffic), the delay and jitter performance of control traffic can be observed, which should not be affected by the interfering traffic and have guaranteed latency and low jitter based on Qbv. For the 802.1CB demo, redundant routing is used for critical traffic. The robustness of the traffic transmission can be observed by allowing routing congestion with abundant traffic.
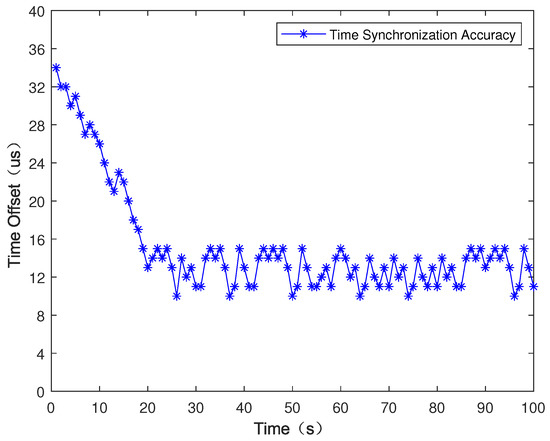
The simulation environment developed here is based on FPGA, and the PHY chip is Realtek RTL8201CP, which has a clock frequency of 25 MHz at 100 Mbps, i.e., the clock accuracy is 40 ns. The corresponding waveforms were obtained and analyzed experimentally.
As shown in Figure 3, the vertical coordinate time offset represents the time deviation between nodes measured at each time in μs, and the horizontal coordinate time represents the time-synchronization interval, which is 1 s. After a short period of jitter at the beginning of the time synchronization, the time deviation between nodes tends to converge; the final value of this time-synchronous convergence converges to 14.5 μs. The simulation experimental results show the effectiveness of the time synchronization, which shows that AS is feasible in the demo setup.
As shown in this figure, synchronization is examined by observing whether two A/V traffic generators are synchronized or not. They can be two AVB cameras recording the same view. In Display 1, it shows the views of two cameras, respectively. When they are synchronized, the displayed views of the two cameras are the same. This is an intuitive show. More accurately, it can be tested by using time-record software. Two cameras photograph the software with the time display and transmit them to DCU 1. Then, whether the transmitted pictures with time are the same or not can be seen. 802.1Qbv [18] is checked by using three traffic generators, i.e., A/V traffic, best-effort traffic and control traffic. With the interfering traffic (BE traffic and A/V traffic), the delay and jitter performance of control traffic can be observed, which should not be affected by the interfering traffic and have guaranteed latency and low jitter based on Qbv. For the 802.1CB demo, redundant routing is used for critical traffic. The robustness of the traffic transmission can be observed by allowing routing congestion with abundant traffic.
The simulation environment developed here is based on FPGA, and the PHY chip is Realtek RTL8201CP, which has a clock frequency of 25 MHz at 100 Mbps, i.e., the clock accuracy is 40 ns. The corresponding waveforms were obtained and analyzed experimentally.
As shown in Figure 3, the vertical coordinate time offset represents the time deviation between nodes measured at each time in μs, and the horizontal coordinate time represents the time-synchronization interval, which is 1 s. After a short period of jitter at the beginning of the time synchronization, the time deviation between nodes tends to converge; the final value of this time-synchronous convergence converges to 14.5 μs. The simulation experimental results show the effectiveness of the time synchronization, which shows that AS is feasible in the demo setup.
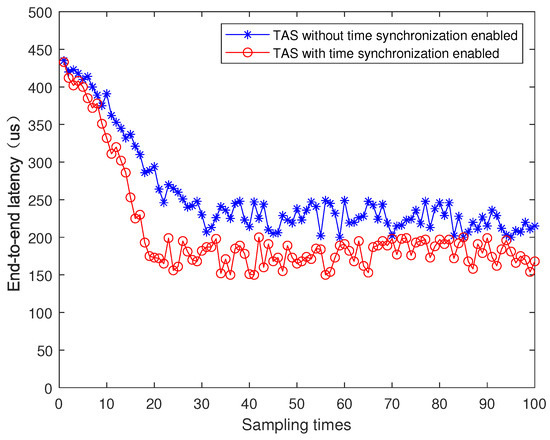
 In Figure 4, the vertical axis end-to-end latency represents the total time it takes for a data packet to be sent from the sender to the receiver, measured in microseconds (μs). The horizontal coordinate sampling times indicates the number of times the data are sampled at the same time interval. The impact of enabling the time-synchronization feature on the traffic-scheduling performance of the TAS algorithm is verified by comparing with and without enabling time synchronization, and the results show that the end-to-end delay of traffic is reduced by an average of 80 μs when time synchronization is enabled. In addition, simulation experiments show that Qbv achieves end-to-end low latency performance under time synchronization, which also validates the effectiveness and feasibility of the demo setup.
In Figure 4, the vertical axis end-to-end latency represents the total time it takes for a data packet to be sent from the sender to the receiver, measured in microseconds (μs). The horizontal coordinate sampling times indicates the number of times the data are sampled at the same time interval. The impact of enabling the time-synchronization feature on the traffic-scheduling performance of the TAS algorithm is verified by comparing with and without enabling time synchronization, and the results show that the end-to-end delay of traffic is reduced by an average of 80 μs when time synchronization is enabled. In addition, simulation experiments show that Qbv achieves end-to-end low latency performance under time synchronization, which also validates the effectiveness and feasibility of the demo setup.
2.4. Test Standards
To evaluate the effects of TSN on time-sensitive applications and general traffic, test specifications are gradually worked out. The main contributor is OA, which was jointly established by related companies such as NXP, Broadcom and BMW in 2011 and currently has more than 340 members. To apply Ethernet-based communications and TSN to automotive networks, OA formulates and unifies the physical layer, protocol consistency and interoperability specifications of IEEE 100 base-t1, 1000 base-t1 and 1000 base-rh communication methods. OA presents some specifications on the tests of the wiring harness, switch, ECU and other functional requirements, e.g., ECU-level physical layer, data link layer, TCP/IP protocol layer, SOME/IP test specifications formulated by the technology committee (TC) 8, and the automotive wiring harness and connector test specifications formulated by TC 2, and interoperability, compliance, and electro-magnetic compatibility (EMC) requirements and test methods for 10 BASE-T1 PHYs standardized by TC 14. Most of the 14 TCs of OA focus on the PHY layer, protocol consistency and interoperability, which are the basis of TSN implementation. The TC focusing on the TSN protocol test itself is TC 11, which creates specification and qualification requirements for Ethernet switches. In detail, TC 11 defines functional features for switch semiconductors (standalone or built-in), and gives the interfacing, configuration diagnostics and monitoring of switches, which can be used for TSN test. In addition, TC 11 specifies tests on TSN requirements and characteristics, such as QoS requirements, queuing, time stamping, policing, and filtering [27]. In TC 11 [27], the requirements and test points of switches are specified. For example, it indicates that the Ethernet switch shall support at least eight different levels of priorities according to IEEE 802.1Q and provide a queue for each priority on each egress port to support different QoSs of TSN. The Ethernet switch can overwrite the priority of a frame at an ingress port independent of the incoming priority (i.e., support global priority overwrite). Incoming priorities shall be freely mapped to internal queues by the ingress filter. Frames of internal queues shall be freely mapped to priorities according to IEEE 802.1Q [28] on the egress port. For each queue at the egress port, it has a shaper to schedule frames. The shaper supports strict priority scheduling and the CBS algorithm according to IEEE 802.1Qav [17]. And each queue can deactivate each shaper individually to cancel TSN scheduling. For time synchronization, TC 11 specifies that the Ethernet switch should support both the PTP 1588 protocol and IEEE 802.1AS [13] protocol. In addition, each port should synchronize with each other. For the diagnostics and robustness, the Ethernet switch shall provide at least the following counters individually for each port: number of received frames, number of received bytes, number of dropped frames after reception, number of sent frames, number of unsuccessful sent frames, number of sent bytes, and maximum fill level of the queues since clearing the counter. In [27], TC 11 also provides a collection of all test cases which are recommended to be considered for automotive use cases and should be referred by car manufacturers within their quality-control processes. In detail, it presents the test procedures of time synchronization based on TSN, which checks the 1-step frame forwarding mechanism, including the correct implementation of residence time measurement. The test station sends sync frames to the PTP slave port and receives frames on all PTP master ports of the device under test (DUT). The corresponding time stamps of the test station are recorded. The correction time of the sync message is checked if the value correlates to the timestamp measurements of the test station. In addition, it checks whether the switch supports priority-based QoS or not by using all eight possible values. The strict priority algorithm is utilized as a forwarding selection mechanism in order to verify that forwarding is based on priorities.3. TSN-Related Products
Early TSN products were generally used for industrial automation with the realization of main protocols, such as EEE 802.1AS [13], IEEE 802.1Qav [17], and IEEE 802.1Qat [22]. With the development of TSN and autonomous driving, some TSN products for automotive are designed. Active manufacturers in this area mainly include TTTech, Microchip, NXP, Excelfore, Broadcom, Marvell’s, Spirent, etc. In terms of TSN switch chip, a NXP product, NXP sja1110, is the first automotive Ethernet switch, which was designed to solve the huge challenges faced by current in-vehicle networks, including scalability, reliability, security, and high-speed traffic engineering. This switch complies with the AVB/TSN synchronization standard. In addition, NXP designed the SJA1105T chip, which is a core of multi-functional product. This switch chip supports a network with standard Ethernet, which not only supports best-effort business but also QoS-required traffic by using TSN for clock synchronization and time-aware shaping. The Microchip Corporation designed a series of Ethernet switches, such as KSZ8565, KSZ8765 and KSZ8842, which support TSN characters, including IEEE 1588 v2 PTP. Broadcom BCM8956X series devices are Broadcom’s fifth-generation fully integrated L2+ multilayer switch solution, which supports AVB protocol stack (IEEE 802.1AS [13] time synchronization and IEEE 802.1Qat [22]). Except for the realization of the basic specifications of AVB, Marvell developed a series of products with more TSN specifications. For example, the switches 88Q5072 and 88Q6113 of Marvell addeds TSN features to achieve the filtering and control of data streams (IEEE 802.1Qci [24]) and frame preemption (IEEE 802.1Qbu [15]). The integrated L3 hardware accelerator allows a gigabit routing throughput of up to 10 Gbps to be achieved without internal processor intervention. To promote big data transmission in the vehicle network, these devices provide efficient sleep/wake functions that support the TC 10 standard, reducing the overall power consumption. Marvell 88Q5050 is an eight-port, high-security automotive gigabit Ethernet switching chip, which has advanced security features to prevent cyber threats, such as DoS attacks. The eight-port Ethernet switch chip has four fixed IEEE 100 BASET1 [9] ports and four configurable ports. The switch chip provides local and remote management functions, and users can easily access and configure the device. In terms of the TSN protocol stack, Excelfore eAVB/TSN now runs in cameras, video displays, head units and ECUs from numerous vendors. The Excelfore eAVB/TSN has already been ported to automotive-grade operating systems, including Linux, Mentor automotive open system architecture (AUTOSAR) and Green Hills Software INTEGRITY [29]. The Excelfore protocol stacks integrated and optimized for use with the safe and secure INTEGRITY RTOS from Green Hills Software [29], including support for Ethernet AVB/TSN Talker/Listener, DoIP, SOME/IP, and RTP/RTCP (including IEEE 1733) and 802.1AS [13] slave/bridging. In terms of TSN testing, TTTech designed a combination switch ECU called DESwitch Hermes 3/1 BRR, which is used for evaluating a variety of communication standards, including AVB, TSN and time-triggered Ethernet (SAE AS6802). With these technologies, users can evaluate the convergence of Ethernet control traffic, including security applications and the vehicle backbone architecture. Polelink developed a TSN test tool for automotive Ethernet called the TSN box. This TSN box is a network interface and gateway for TSN network. It was developed based on field programmable gate array (FPGA) technology to serve as a data collection medium for TSN tools, which supports nanosecond timestamps for time synchronization among multiple TSN boxes. In addition, the TSN box provides rich functional support for AVB and TSN protocols commonly used in automotive Ethernet architectures, which can be used for exploring PTPv2, 802.1ASrev [14] and different TSN shaping algorithms, such as CBS, time-sensitive or asynchronous shaping. Xinertai launched an automotive Ethernet test program based on the proprietary BigTao hardware test platform. Cooperating with Xinerta’s software Renix [30], the Ethernet test program can realize Layer 2–7 traffic test and protocol simulation for automotive Ethernet, support 100/1000 Base-T1 port connectivity test, RFC2889/RFC2544/RFC3918 standard test suite, routing and switching protocol testing, AVB/TSN protocol testing, distributed denial-of-service (DDoS) attack testing, long-term (such as 10*2410*24 h) stability and streaming testing, etc. Spirent issued the AUTOSAR conformance test suite pack, which provides different protocol conformance test suites according to the OA test specification. Through this test suite, automotive Ethernet tests can be run on Spirent C1 and C50 devices, which supports testing on clock synchronization and 802.1 Qav [17] scheduling of TSN. For the vehicle Ethernet PHY chip, it must firstly meet the IEEE 802.3bw or IEEE 802.3bp protocol, and then must pass the AEC-Q 100 standard. The existing semiconductor manufacturers that have launched automotive Ethernet PHY chips include BCM 89610, BCM 89611, BCM 8988X, BCM 89810, BCM 89811 and BCM 89820 of Broadcom, AR 8031 of Artheros, TJA 1100, TJA 1101 and TJA 1102 of NXP. For example, NXP TJA 1101 is based on the IEEE 100 BASE-T1 standard, with the single-port Ethernet PHY transceiver. NXP TJA 1101 meets the needs of automotive applications and supports 100 Mb/s transmission, and its receiving capacity is over 15 m of the unshielded twisted pair. TJA 1100 can achieve the lowest system cost, and meet the strict restrictions on area and heat dissipation of the sensors of the new generation of ECU and ADAS. It complies with AEC-Q 100 level 1, and the original design intention has the smallest package size, the lowest external component overhead and low power consumption.4. Demo Setup of TSN
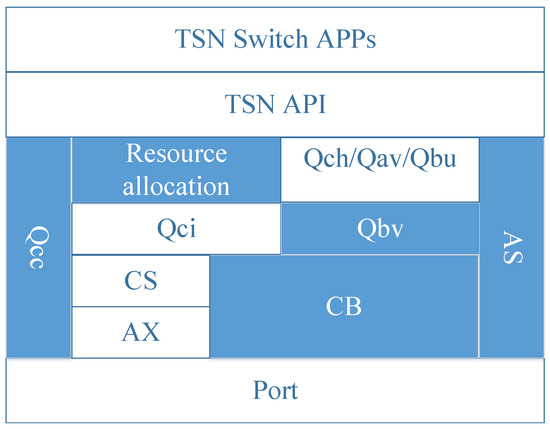
To realize basic functions of TSN and provide a deterministic network for autonomous driving, the least complete set of standards to be realized should be considered. The complete set of most TSN products is usually constructed by standards of AVB, i.e., 802.1AS [13], 802.1Qav [17], and 802.1Qat [22], which are mainly used for A/V streams. Safety-relevant devices, such as multiple kinds of sensors, need synchronization with each other to infuse them. In addition, synchronization is the preliminary step of many scheduling and management schemes. Thus, the 802.1AS [13] specification needs to be realized first. To provide deterministic transmission for critical traffic, such as the control comment, bandwidth reservation is needed. On the other hand, the traffic class is finite and fixed, compared with that of industry. Thus, a preferred bandwidth reservation method is pre-allocating the bandwidth for different application traffic instead of 802.1Qat [22] to reduce the signaling overhead and related information storage brought by the stream register of 802.1Qat. Correspondingly, a scheduling method is needed for bridges and end stations to queue and forward frames with different classes. 802.1Qav [17] is preferred for data transmission within a domain. For data transmission among multiple domains, 802.1Qbv [18] is an alternative method. In addition, 802.1CB can provide a baseline for giving redundant paths and supporting robustness. 802.1Qcc [23] can provide corresponding configuration for these protocols. Other specifications can be further realized for a more robust and deterministic network. The basic TSN protocol stack model of the switch of in-vehicle networks is shown in Figure 1, where blue blocks construct a minimum complete set of standards to be realized for a TSN-supported bridge of automotive networks. The end station can be seen as a bridge with a port.Figure 1. A basic TSN protocol stack model of automobile networks.
Figure 2. A demo setup for some typical TSN functions.
Figure 3. Time offset between two nodes.
Figure 4.
End-to-end delay of traffic transmission.
In Figure 4, the vertical axis end-to-end latency represents the total time it takes for a data packet to be sent from the sender to the receiver, measured in microseconds (µs). The horizontal coordinate sampling times indicates the number of times the data are sampled at the same time interval. The impact of enabling the time-synchronization feature on the traffic-scheduling performance of the TAS algorithm is verified by comparing with and without enabling time synchronization, and the results show that the end-to-end delay of traffic is reduced by an average of 80 µs when time synchronization is enabled. In addition, simulation experiments show that Qbv achieves end-to-end low latency performance under time synchronization, which also validates the effectiveness and feasibility of the demo setup.
References
- Can Specifications. Bosch Std. 1991. Available online: https://www.kvaser.com/software/7330130980914/V1/can2spec.pdf (accessed on 15 June 2023).
- Specification of Lin Interface. AUTOSAR Std. 2017. Available online: https://www.autosar.org/fileadmin/LINInterface.pdf (accessed on 15 June 2023).
- Most Specification. MOST Std. 2006. Available online: https://www.mostcooperation.com/publications//mostspecificationpdf/ (accessed on 15 June 2023).
- Consortium, F. Flexray communicationssystem-protocol specification. Version 2005, 2, 198–207.
- Teener, M.D.J.; Fredette, A.N.; Boiger, C.; Klein, P.; Gunther, C.; Olsen, D.; Stanton, K. Heterogeneous networks for audio and video: Using ieee 802.1 audio video bridging. Proc. IEEE 2013, 101, 2339–2354.
- Renesas, J.T. In Requirements for Automotive AVB System Profiles; Technol Report; AVnu Alliance: Beaverton, OR, USA; 2011. Available online: https://avnu.org/wp-content/uploads/2014/05/Contributed-Automotive-Whitepaper_April-2011.pdf (accessed on 15 June 2023).
- Bruckner, D.; Stanica, M.-P.; Blair, R.; Schriegel, S.; Kehrer, S.; Seewald, M.; Sauter, T. An introduction to opc ua tsn for industrial communication systems. Proc. IEEE 2019, 107, 1121–1131.
- IEEE 802.1. Time-Sensitive Networking (TSN) Task. Available online: https://1.ieee802.org/tsn/ (accessed on 15 June 2023).
- IEEE P802.3bw/D3.3; IEEE Approved Draft Standard for Ethernet Amendment: Physical Layer Specifications and Management Parameters for 100 Mb/s Operation over a Single Balanced Twisted Pair Cable (100BASE-T1). IEEE Std.: Piscataway, NJ, USA, 2015.
- IEEE Std 802.3cg; IEEE Draft Standard for Ethernet Amendment 5: Physical Layer Specifications and Management Parameters for 10 Mb/s Operation and Associated Power Delivery over a Single Balanced Pair of Conductors. IEEE Std.: Piscataway, NJ, USA, 2019.
- IEEE Std 802.3ch; IEEE Standard for Ethernet–Amendment 8: Physical Layer Specifications and Management Parameters for 2.5 Gb/s, 5 Gb/s, and 10 Gb/s Automotive Electrical Ethernet. IEEE Std.: Piscataway, NJ, USA, 2020.
- IEEE 802.3 Working Group. Available online: https://www.ieee802.org/3/ (accessed on 15 April 2023).
- 802.1AS-2020; IEEE Standard for Local and Metropolitan Area Networks–Timing and Synchronization for Time-Sensitive Applications. IEEE Std.: Piscataway, NJ, USA, 2020.
- P802.1AS-Rev/D8.3; IEEE Draft Standard for Local and Metropolitan Area Networks-Timing and Synchronization for Time-Sensitive Applications. IEEE Std.: Piscataway, NJ, USA, 2019; pp. 1–516.
- 802.1Qbu-2016; IEEE Standard for Local and Metropolitan Area Networks–Bridges and Bridged Networks–Amendment 26: Frame Preemption. IEEE Std.: Piscataway, NJ, USA, 2016; pp. 1–52.
- 802.1br-2012; IEEE Standard for Local and Metropolitan Area Networks–Virtual Bridged Local Area Networks–Bridge Port Extension. IEEE Std.: Piscataway, NJ, USA, 2012; pp. 1–135.
- 802.1Qav-2009; IEEE Standard for Local and Metropolitan Area Networks–Virtual Bridged Local Area Networks Amendment 12: Forwarding and Queuing Enhancements for Time-Sensitive Streams. IEEE Std.: Piscataway, NJ, USA, 2009; pp. 1–72.
- 802.1Qbv-2015; IEEE Standard for Local and Metropolitan Area Networks–Bridges and Bridged Networks-Amendment 25: Enhancements for Scheduled Traffic. IEEE Std.: Piscataway, NJ, USA, 2015; pp. 1–57.
- 802.1Qch-2017; IEEE Standard for Local and Metropolitan Area Networks–Bridges and Bridged Networks–Amendment 29: Cyclic Queuing and Forwarding. IEEE Std.: Piscataway, NJ, USA, 2017; pp. 1–30.
- 802.1Qcr-2020; IEEE Standard for Local and Metropolitan Area Networks–Bridges and Bridged Networks-Amendment 34: Asynchronous Traffic Shaping. IEEE Std.: Piscataway, NJ, USA, 2020; pp. 1–151.
- 802.1Qca-2015; IEEE Standard for Local and metropolitan area networks—Bridges and Bridged Networks-Amendment 24: Path Control and Reservation. IEEE Std.: Piscataway, NJ, USA, 2015; pp. 1–120.
- 802.1Qat-2010; IEEE Standard for Local and metropolitan area networks–Virtual Bridged Local Area Networks Amendment 14: Stream Reservation Protocol (SRP). IEEE Std.: Piscataway, NJ, USA, 2010; pp. 1–119.
- 802.1Qcc-2018; IEEE Standard for Local and Metropolitan Area Networks–Bridges and Bridged Networks–Amendment 31: Stream Reservation Protocol (srp) Enhancements and Performance Improvements. IEEE Std.: Piscataway, NJ, USA, 2018; pp. 1–208.
- 802.1Qci-2017; IEEE Standard for Local and metropolitan area networks–Bridges and Bridged Networks–Amendment 28: Per-Stream Filtering and Policing. IEEE Std.: Piscataway, NJ, USA, 2017.
- 802.1CB-2017; IEEE Standard for Local and Metropolitan Area Networks–Frame Replication and Elimination for Reliability. IEEE Std.: Piscataway, NJ, USA, 2017.
- Finn, N.; Thubert, P.; Varga, B.; Farkas, J. Deterministic Networking Architecture. RFC 8655. 2019. Available online: https://www.rfc-editor.org/info/rfc8655 (accessed on 15 June 2023).
- OPEN TC11; TC 11 Switch Semiconductor Test Specification. OPEN Alliance Std.: Irvine, CA, USA, 2018. Available online: https://www.opensig.org/tech-committees/tc11/ (accessed on 15 June 2023).
- 802.1Q-2018. IEEE Standard for Local and Metropolitan Area Network–Bridges and Bridged Networks. IEEE Std.: Piscataway, NJ, USA, 2018.
- Green Hills Software (n.d.). INTEGRITY Real Time Operating System (RTOS). Available online: https://ghs.com/products/rtos/integrity.html (accessed on 15 June 2023).
- Xinerta. Renix Software. Available online: https://xinertel.com/NewsInfoSearch?searchKey=Renix (accessed on 15 June 2023).
More