Energy storage is one of the major barriers to achieve long-duration autonomy in robots. This entry evaluates the capabilitire are various types of relevantechargeable battery technologies, taking into consideration the requirements of different applications in robotics. We also discuss additionalies such as lead-acid, nickel-cadmium, nickel-metal hydride and Lithium-ion batteries. Lead-acid batteries are the most mature rechargeable battery technologies that can be used to overcome the inherent limitations of the most common y. However, Lithium-ion batteries are more suitable for mobile applications due to the high energy density properties, enabling lighter battery chemistriespacks but with a higher cost.
- batteries
- robotics
- design engineering
- mobile robots
- space robots
1. Introduction
2. Current Battery Technologies
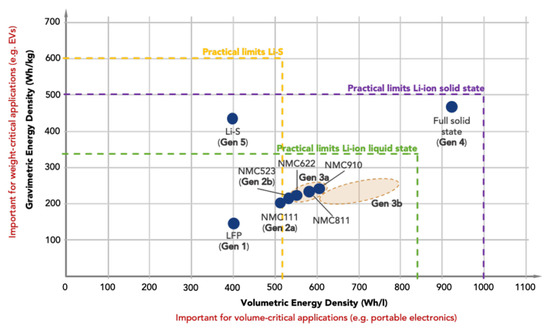
There are various types of rechargeable batteries such as lead-acid, nickel-cadmium, nickel-metal hydride and Lithium-ion batteries. An overview of some common battery chemistries and their abbreviations is given in Table 1. Lead-acid batteries are the most mature rechargeable battery technology, however, in comparison with Lithium-ion technology, are more suitable for mobile applications due to the high energy density properties, enabling lighter battery packs but with a higher cost.| LCO | Lithium Cobalt Oxide (LiCO2) |
| LFP | Lithium Iron Phosphate (LiFePO4) |
| LMO | Lithium Manganese Oxide (LiMn2O4) |
| LiPo | Lithium-ion Polymer |
| NCA | Lithium Nickel-Cobalt-Aluminum Oxide (LiNiCoAlO2) |
| NMC | Lithium Nickel-Manganese-Cobalt Oxide (LiNiMnCoO2) |
| LiS | Lithium Sulphur |
| LTO | Lithium Titanate (Li2TiO3) |
| Ni-MH | Nickel-Metal-Hydride |
3. Capability Analysis of Battery Technologies for Robotic Applications
3.1. Battery-powered robots
The most common categories of battery-powered robots are the following (Figure 2):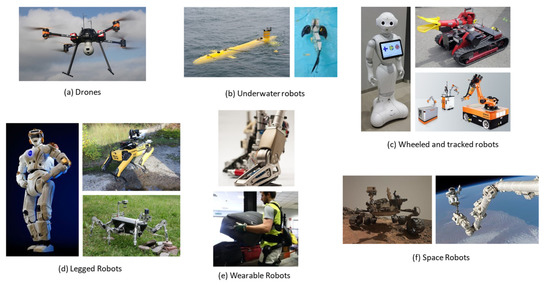
- (1)
-
Space robots: the two main types of robots present in space missions are orbital and planetary robots, both having the possibility to carry robotic arms for manipulation [26][27].
- (2)
-
Drones: these are typically fixed-wing and multi-rotor drones.
- (3)
-
Underwater robots, more specifically Autonomous Underwater Vehicles (AUVs): These have electric motors on board to actuate their control surfaces (rudders and sterns), actuators for manipulation (robotic arms), in some cases, the thruster. Less conventional, non-commercial solutions such as snake robots, jellyfish robots or swimming (fish-like) robots are also usually actuated by electric motors [27][28].
- (4)
-
Wheeled and tracked mobile robots: Most unmanned ground vehicles (UGVs) fall under this category, but many other mobile robots also fit this description. The well-known humanoid robot Pepper, for example, can also be classified as a wheeled robot [28][29].
- (5)
-
Legged robots: Another type of UGV, where a large number of actuators—typically electric motors [29][30][30,31] are used to drive the joints of two or more robotic legs [31][32]. These robots can also be equipped with robotic arms to manipulate payloads.
- (6)
-
Wearable robots: This category includes powered prostheses and active exoskeletons, which exist for both upper and lower limbs. Exoskeletons can fulfill different functions: they can assist the wearer or augment his/her capabilities, at home or in industrial settings, or they can be used for rehabilitation purposes [32][33].
3.2. Suitability of battery chemistries
LFP and LTO present a good match for most robot categories. This is not a surprise, since these are also two of the most performant battery technologies. LFP emerges as the best-suited battery for all considered applications. An important disadvantage of the chemistry, however, is its self-discharge, which might trouble the balancing of the battery system [33][34]. LiPo presents an excellent alternative for drones, legged robots, wearable robots and wheeled robots thanks to its safety and its ability to deal with current variations. Moreover, the use of gel electrolytes instead of liquid electrolytes makes LiPo batteries safer and lighter by providing flexibility in packaging. LCO and LMO score poorly overall as these mature technologies are being overtaken by other technologies. In contrast, the emerging LiS technology still needs considerable improvements to become competitive. Finally, NMC and NCA turn out as suitable chemistries for specific applications.
It is important to note that tailor-made solutions and specificities of the chemistries can have an impact on the choice for specific chemistry. For example, the lighter packaging of LiPo batteries makes them the cell of choice for most commercial electronic devices [11]. High-rate LFP chemistry is used in only a small number of drones for shorter missions, due to its good high-current discharge abilities. NMC technology is utilized for longer missions where energy demand (specific energy) dominates the selection process.
The pressure tolerance of the battery is an additional consideration that guides the Lithium-ion chemistry choice for underwater robots [34][35]. Overall, there is no clear preference in the present battery selection for underwater robots. The present Lithium-ion technologies are replacing the usually used lead-acid and Ni-MH batteries providing more energy and lifespan [35][36]. LiPo batteries are considered a suitable choice since their packaging can be designed to resist pressure in deep water. NMC, LTO and NCA can also be good alternatives for underwater robots due to their lifespan.
In commercial wheeled and tracked robots, a variety of Lithium-ion batteries are used, including LFP and LiPo batteries. LFP technology indeed ranks first in the battery selection for this category of robots, which are very balanced in terms of requirements. LiPo batteries – the third choice after LTO – can bring light packaging and flexibility as additional advantages.
For legged robots, LTO and LiPo perform similarly as LFP. The limited commercial availability of LTO batteries makes LFP and LiPo technologies, which dominate the market share, the preferred choice. LiPo batteries are more common as the polymer electrolytes endow them with the ability to support the high current pulses typical of legged robots.
Specifics about the battery chemistry of wearable robots are rarely reported. LiPo technology is an excellent choice for these robots, as it fits most of the requirements for current variation, specific power and safety. LiPo battery packs have indeed been used in several exoskeletons, although newer exoskeletons increasingly rely on Lithium-ion chemistries [36][37][41,42]. LFP and LTO can be considered the most suitable technologies.
Due to their excellent properties in terms of current variation and lifespan, LFP and LTO technologies could be considered for space robots. However, due to high self-discharge (important for long missions) and lack of commercial availability, they are not commonly used. NCA is found to be the key technology of interest in NASA’s future consideration as they are closely studying various market available NCA batteries [38][44]. It is also the battery chemistry that was selected for the Mars Rover. In recent missions, robots have typically been equipped with NCO technology batteries, which are similar in terms of chemistry to NCA but lack the presence of Aluminum [39][43]. LCO is often used in NASA missions. The possible reasons for this may include customized battery cell, maturity of the technology, optimized anode resisting lithium-plating at low temperature, better stability etc. [40][45]. For satellite missions, both LiPo and Lithium-ion cells are being considered depending on the features of interest [41][42][46,47].
4. Additional Technologies for Improved Performance
Several additional technologies can be added to overcome the inherent limitations of batteries, albeit often at the cost of extra weight, complexity and cost.4.1. Battery Management Systems
4.1. Battery Management Systems
The Battery Management System (BMS) ensures that the battery is operated within the Safe Operating Area (SoA) and helps prevent accelerated degradation of the battery [43][48]. It can therefore be considered a safety-critical component. The main functions of the BMS are (1) monitoring the voltage, current and temperature; (2) diagnosis of the battery by estimating the state of the battery; (3) cell balancing by keeping the cell voltage at the same level; (4) management of the battery system, both electrical and thermal; and (5) communications. Advanced BMS with wireless communication systems and advanced sensor technologies could improve battery monitoring [44][45][49,50]. Hence, next-generation models for battery performance and aging (SoH and RUL) monitoring can upgrade BMS functionalities [46][47][48][49][50][51,52,53,54,55]. BMS units are commercially available, and off-the-shelf devices often present the most convenient solution. However, for robotic applications, these may end up being less cheap, less safe, and less sustainable in the longer term compared to customized solutions. Customized BMS have been developed for rescue robots [51][56] and underwater robots [52][57].4.2. Thermal Management Systems
4.2. Thermal Management Systems
Achieving high battery performance under safe conditions is a challenge that is addressed by the design of appropriate battery thermal management systems (BTMS). Accurate 1D–3D thermal models are indispensable for predicting the thermal behavior of the battery to improve its design and shorten the development process [53][58]. Robotic applications may require a tailor-made BTMS to fit their specific needs, the development of which may be driven by space limitations and the movement of the robot. There is a need for scientific research in this domain. In addition to the thermal management of the BMS, active cooling (based on air or liquid [54][59]) and passive cooling (phase change materials and heat pipes [55][60]) can be introduced to keep the battery’s temperature in check. Thermal management is, of course, not limited to the batteries: the performance of actuators and power electronics is also directly affected by temperature, which is why they often have their own thermal management systems. An overview of thermal management systems for robotic systems can be found in [56][61].4.3. Recharging and Battery Swapping
4.3. Recharging and Battery Swapping
The need for high energy densities can be reduced by frequent recharging. Various charging methods have been developed, often optimized for the working conditions of the robot. In many cases, the robot is idle or has limited capabilities while it is being charged; therefore, a high charging speed is desired. Here, the BMS plays an important role in controlling the charging speed, resisting overcharging if safety is compromised [57][62], and optimizing the charging strategy, which supports the energy management of the battery [58][59][63,64]. In terms of battery selection, the fast-charging capabilities of battery technologies such as LFP, LTO, NCA and LiPo puts them ahead of others when charging speed is a priority. To enable easy charging, docking stations are now utilized for many commercial robots such as vacuum cleaners, grass-mowing robots and mobile social robots [26][27]. Moreover, for electric vehicles, especially for the upcoming driverless cars, robotic EV chargers, both stationary [60][65] and mobile [61][66], are under development. These approaches are being transferred to untethered robots [62][63][67,68], although they present some application-specific challenges. Docking stations for underwater robots that utilize contact-based wet-mate connector technology require high-precision docking and are prone to corrosion and electrical safety issues [34][35]. To overcome these limitations, wireless recharging techniques are being investigated [64][69]. Inductive and capacitive power transfers are also possible at the cost of lower charging speed and higher losses [65][66][70,71]. An advantage of wireless technologies is that they can be deployed for continuous charging [67][68][72,73], which is an interesting option if the downtime associated with recharging is considered prohibitively long. However, the cost of continuous wireless charging infrastructure can turn out to be high, and the resonating coils that are typically used may produce high values of stray magnetic fields [69][70][74,75]. Power transfer through sliding contacts (so-called “powered floors”) can be a more cost-effective alternative [71][76]. For mobile robots that are not in contact with the ground, recharging during the mission is made possible by photovoltaic cells [72][77] and electromagnetic field (EMF)-based alternatives such as charging from high-voltage power lines [73][78]. Alternative approaches include laser beam and battery dumping. Another method to reduce the downtime is battery exchange or battery swapping. In [74][79], a change/recharge station is presented that swaps the depleted battery of a UAV with a fully charged one. A queue of batteries, which are continuously being recharged, is available at all times. Barrett et al. developed a mobile ground robot for the battery exchange of small-scale UAVs [75][80].4.4. Hybrid Architectures
High charge and discharge currents at very short pulse lengths are challenging for many battery chemistries. Hybrid architectures (battery + battery or battery + capacitor) could present a solution for robots that perform cyclic tasks, but require additional attention to factors such as cost, self-discharge and temperature effects [76][77][78][81,82,83]. Capacitors, for example, generally exhibit higher self-discharge rates than batteries. A capacitor will thus drain energy from the battery in a battery–capacitor hybrid, decreasing the autonomy of the robot. Temperature effects are another important consideration for hybrid battery structures. They affect some battery technologies more than others, which is why they should be considered when designing a hybrid battery structure for a robot expected to operate at a wide range of temperatures. This is the case for, e.g., field robots and wearable robots. The hybrid use of battery technologies would also require advanced control strategies to efficiently optimize the power and energy demand, for example, shown in [79][84]. Finally, the mixed-use of coupled batteries may challenge the sizing requirements in robotic applications [80][81][85,86].4.5. Packaging
The performance and safety of a battery can be affected by the working conditions, in particular, moisture, vibrations and shock loads. Many untethered robots are deployed in such harsh conditions. A robust packaging protects against these conditions, but adds around 15% to the volume and mass of the battery [82][87]. Typical shapes of Lithium-ion batteries (cylindrical, pouch and prismatic) provide benefits in packaging density, but this comes at the cost of more complex thermal management [83][88]. The impact of shock and vibration on battery performance is, however, a poorly investigated topic [84][89]. Standard shock and vibration tests found in the literature report no effect on the battery capacity [85][90]. However, an external shock due to accidents, improper packaging, pressure and operational thrust can have a detrimental effect on the battery characteristics triggering sudden failure [85][86][90,91]. A robust mechanical design considering the thermal protection, egressing outlet, vibration isolation, crashworthiness, packaging material, and concept not only improves the battery reliability but also positively impacts performance [83][87][88,92]. On a robot level, shock-absorbing materials, airbags [88][93], compliant actuators [89][94], fall and impact detection techniques [90][95] with prevention strategies and constraint handling control techniques [91][96] can be used to mitigate the damaging effects of shock loads. A robust battery packaging can further protect against these conditions, improving mechanical stability but also enhancing safety [87][92]. There is however a packaging penalty in terms of the mass and volume of the battery packs. A good rule of thumb is to deduct 15 percent from the cell performance figures [7][84][7,89]. Typical shapes of Lithium-ion batteries (cylindrical, pouch and prismatic) provide benefits in packaging density, but this comes at the cost of more complex thermal management [83][88]. Batteries are usually subject to standards and passed through quality control before being used in an application that already certifies safe handling during regular and irregular shocks [85][90]. Errors in the system design can, however, also trigger mechanical failure or damage and, consequently, battery performance. In this case, the LiPo battery is often considered a better choice due to its flexible shape and size.