Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 1 by Quanyu Wang and Version 2 by Rita Xu.
Vehicle models are grouped into numerous types based on the structural characteristics and working conditions, including wheeled tractors, tracked tractors, rice transplanters, high clearance sprays, agricultural robots, agricultural tractor–trailers, etc.车辆模型根据结构特性和工作条件分为多种类型,包括轮式拖拉机、履带式拖拉机、插秧机、高间隙喷雾剂、农业机器人、农用拖拉机拖车等。根据农业机械的不同工作场景和类型,总结了路径跟踪控制方法的应用和改进。
- autonomous navigation
- agricultural vehicle
- path tracking
1. Introduction
According to a report by the Population Division of the United Nations Department of Economic and Social Affairs in 2019, it is expected that the total world population will reach 9.7 billion by the middle of this century, and the demand for food will grow rapidly [1]. For a long time, intensive and extensive agriculture has been a priority solution to the imbalance between population growth and food shortages, but this approach is costly and labor-intensive [2]. On the one hand, many countries’ agricultural sectors are facing an aging agricultural workforce [3]. On the other hand, due to the development of urbanization, more and more young laborers are moving away from agricultural production activities and towards cities, which will lead to a difficult problem of food shortage in the future. To address food shortages and other issues in agriculture, agriculturally developed countries are researching autonomous agricultural vehicles, replacing the basic technique and labor force required by traditional farming with sensor technology and electro-hydraulic control technology [4]. The global population aging and labor shortage have promoted the demand for mechanization and automation in industries, agriculture, and other fields [5]. Benefiting from the development and improvement of satellite positioning technology, inertial navigation technology, and control theory, the agricultural vehicle automatic navigation technology is increasingly being applied in agricultural production activities such as plowing, sowing, fertilization, and harvesting, becoming a key technology for precision agriculture [6]. The agricultural vehicle automatic navigation technology enables vehicles to better adapt to the complex field, improves the accuracy and efficiency of agricultural machinery operations, and reduces repeated and missed operations. Not only that, but it can also reduce the prolonged fatigue and repetitive driving work of the driver, thereby obtaining sufficient time to monitor and control agricultural machinery [7].
The key technologies of agricultural machinery automatic navigation mainly include positioning and attitude measurement, path planning, and path tracking control [8]. Figure 1 shows the composition of the agricultural machinery’s automatic navigation system. In order to achieve automatic navigation driving, it is necessary to install sensors on the vehicle that can provide a location, heading information, and environment information. The most frequently used positioning and attitude measurement technologies in the research of agricultural machinery automatic navigation driving include global navigation satellite system (GNSS), inertial navigation system (INS), machine vision (MV) navigation system, and light detection and ranging (LiDAR). GNSS can provide accurate navigation information, such as location, orientation, and speed, in an unobstructed environment, and is widely used in vehicles’ automatic driving. Alonso-García et al. [9] used low-cost GPS receivers as positioning sensors for agricultural tractors and evaluated the performance of tractor automatic navigation systems through tracking straight-line trajectory tests. The inertial navigation system (INS) collects acceleration and angular velocity information through the inertial measurement unit (IMU) and is not subject to external interference. However, as time goes by, the accumulation of sensor errors will lead to a decline in accuracy. LiDAR has the advantages of high precision, and strong anti-interference ability, and is widely used in orchard environment perception and navigation. Li et al. [10] used LiDAR to obtain the measurement data of the orchard tree, and finally fitted the straight line of the fruit tree, using the center of the tree row as the navigation path. A single sensor inevitably has certain limitations, which are not conducive to improving navigation and positioning accuracy and reliability. Therefore, positioning technology that combines the advantages of GNSS and INS is becoming increasingly popular in agricultural machinery automatic navigation driving. Yin et al. [11] developed autonomous rice transplanters using RTK-GNSS and IMU. The experimental results showed that the lateral error and heading error of linear path tracking were less than 10 cm and 5°, respectively.

Figure 1. Composition of agricultural machinery automatic navigation system.
1. 简介
The path-tracking control technology is the key to achieving automatic navigation for agricultural machinery [12]根据联合国经济和社会事务部人口司2019年的一份报告,预计到本世纪中叶,世界总人口将达到9亿,对粮食的需求将快速增长[7]。长期以来,集约化和粗放式农业一直是解决人口增长和粮食短缺之间不平衡的优先解决方案,但这种方法成本高昂且劳动密集型[1]。一方面,许多国家的农业部门正面临农业劳动力老龄化[2]。另一方面,由于城市化的发展,越来越多的青年劳动力正在远离农业生产活动,向城市转移,这将导致未来粮食短缺的难题。为了解决农业中的粮食短缺和其他问题,农业发达国家正在研究自主农用车辆,用传感器技术和电液控制技术取代传统农业所需的基本技术和劳动力[3]。全球人口老龄化和劳动力短缺促进了工业、农业等领域对机械化和自动化的需求[4]。受益于卫星定位技术、惯性导航技术和控制理论的发展和完善,农用车辆自动导航技术越来越多地应用于耕作、播种、施肥、收获等农业生产活动中,成为精准农业的关键技术[5]. 农用车辆自动导航技术使车辆能够更好地适应复杂的现场,提高农机作业的准确性和效率,减少重复和漏作业。不仅如此,还可以减少驾驶员长时间的疲劳和重复性驾驶工作,从而获得足够的时间来监测和控制农业机械[6]。
农机自动导航的关键技术主要包括定位姿态测量、路径规划和路径跟踪控制[8]。图1显示了农业机械自动导航系统的组成。为了实现自动驾驶,需要在车辆上安装能够提供位置、航向信息和环境信息的传感器。农机自动驾驶研究中最常用的定位和姿态测量技术包括全球导航卫星系统(GNSS)、惯性导航系统(In the case of accurate agrNS)、机器视觉(MV)导航系统和光探测测距(Licultural machinery location and attitude information, the path tracking control model and method are important to improving the precision and robustness of agricultural machDAR)。GNSS可以在畅通无阻的环境中提供准确的导航信息,如位置、方向和速度,并广泛应用于车辆的自动驾驶。Alonso-García等人[9]使用低成本的GPS接收器作为农用拖拉机的定位传感器,并通过跟踪直线轨迹测试评估拖拉机自动导航系统的性能。惯性导航系统(INS)通过惯性测量单元(IMU)收集加速度和角速度信息,不受外部干扰。但是,随着时间的流逝,传感器误差的累积将导致精度下降。激光雷达具有精度高、抗干扰能力强等优点,广泛应用于果园环境感知和导航。Linery automat等[10]利用激光雷达获取果园树的测量数据,最后拟合果树的直线,以树排中心为导航路径。单个传感器不可避免地具有一定的局限性,不利于提高导航定位精度和可靠性。因此,结合GNSS和INS优点的定位技术在农机自动导航驾驶中越来越受欢迎。Yic navigation system. 等人[11]开发了使用RTK-GNSS和IManyU的自主水稻插秧机。实验结果表明,线性路径跟踪的横向误差和航向误差分别小于10 researchers have conducted extensive research on path-tracking control methods for agricultural vehicles. Common methods include cm和5°。

图1.农机自动导航系统的组成。
路径跟踪控制技术是实现农机自动导航的关键[12]。在农机位置和姿态信息准确的情况下,路径跟踪控制模型和方法对于提高农机自动导航系统的精度和鲁棒性具有重要意义。许多研究人员对农用车辆的路径跟踪控制方法进行了广泛的研究。常用方法有PID控制、模糊控制、模型预测控制、纯追寻模型控制、斯坦利模型控制等。PID control, fuzzy control, model predictive control, pure pursuit model control, Stanley model control, etc. 结构简单,应用广泛,但参数整定困难。Luo et al. [13] used the 等人[13]利用RTK-DGPS receiver to obtain positioning information, combined the tractor kinematic model with the hydraulic steering control model, and designed a 接收器获取定位信息,将拖拉机运动学模型与液压转向控制模型相结合,设计了一种基于PID-based straight-line tracking controller. When the forward speed is 的直线跟踪控制器。当前进速度为0.8 m/s, the maximum tracking deviation is less than 15 cm, and the average tracking deviation is less than 3 cm.时,最大跟踪偏差小于15 cm,平均跟踪偏差小于3 cm。
2. Control Methods Used in Agricultural Vehicle Path Tracking Control农用车辆路径跟踪控制中的控制方法
Path tracking control technology is to calculate and obtain vehicle motion parameters, such as vehicle speed, steering wheel angle, etc., based on vehicle kinematic or dynamic modeling according to the algorithm, so that the vehicle can reach and track the predefined work path. The basic principle is depicted in Figure 路径跟踪控制技术是根据算法基于车辆运动学或动力学建模,计算和获取车辆运动参数,如车速、方向盘角度等,使车辆能够到达并跟踪预定义的工作路径。基本原理如图2. The operating accuracy of agricultural machinery in autonomous driving depends on the control algorithms so that high-precision algorithms can improve the quality and efficiency of agricultural machinery operations. The environmental conditions of different fields are different, and the types of agricultural machinery used are also different.所示。农机在自动驾驶中的运行精度取决于控制算法,因此高精度算法可以提高农机运行的质量和效率。不同田地的环境条件不同,使用的农业机械种类也不同。本节介绍了不同农业机械路径跟踪方法在旱田、稻田、果园、农业机器人和设施农业、铰接式农用车辆中的应用和改进。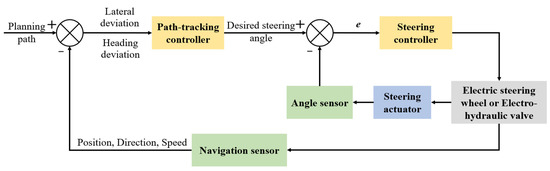
Figure 图2. Block diagram of the path tracking control system. 路径跟踪控制系统框图。
2.1. Dry Field Agricultural Machinery旱田农业机械
The essence of path tracking is that under the developed control algorithm, the target vehicle can track the planned path within a certain accuracy range so that the vehicle can work along the planned path. Tractors can form different operating units with other agricultural machinery to complete tasks such as plowing, sowing, fertilization, and cultivation. The operating environment of tractors is complex and changeable, and the driving skills of drivers vary from person to person, resulting in problems such as low efficiency, decreased operation quality, and waste of land resources in field operation. In order to address these issues, many experts have conducted research on the path-tracking control technology for autonomous tractors. 路径跟踪的本质是在开发的控制算法下,目标车辆可以在一定的精度范围内跟踪规划的路径,从而使车辆可以沿着计划的路径工作。拖拉机可以与其他农业机械组成不同的作业单元,完成犁、播、施肥、耕作等任务。拖拉机的作业环境复杂多变,驾驶员的驾驶技能因人而异,导致在田间作业中效率低下、作业质量下降、土地资源浪费等问题。为了解决这些问题,许多专家对自动驾驶拖拉机的路径跟踪控制技术进行了研究。Backman et al. [14] developed a 等人[38]开发了一种4 WS tractor path tracking algorithm, which uses the tractor’s kinematic and dynamic model and the linear control law to control the steering of the tractor. Winter wheat sowing test results showed that the lateral tracking deviation of straight sowing is less than 拖拉机路径跟踪算法,该算法利用拖拉机的运动学和动力学模型以及线性控制规律来控制拖拉机的转向。冬小麦播种试验结果表明,直播横向跟踪偏差小于0.05 m, and the heading angle tracking deviation is less than 1 degree. To improve the tractor’s ability to track variable curvature paths, Wu et al. [12] designed a variable curvature path tracking method based on the front wheel angle feedforward compensation strategy, which comprehensively considers the driving speed and target path curvature to adjust the look-ahead distance dynamically.,航向角跟踪偏差小于1度。为了提高拖拉机跟踪可变曲率路径的能力,Wu等[12]设计了一种基于前轮角度前馈补偿策略的可变曲率路径跟踪方法,该方法综合考虑行驶速度和目标路径曲率,动态调整前视距离。 农用地表面通常波动较大,拖拉机会受到干扰的影响,例如支撑农机与不确定地面之间的相互作用。当车轮打滑发生时,拖拉机的跟踪误差会增加,甚至影响后续的农业生产活动。The agricultural land surface usually fluctuates greatly, and tractors will be affected by interference, such as the interaction between theaghia 等人 [39] supporting agricultural machinery and the uncertain ground. When wheel slip occurs, the tracking error of tractors will increase and even affect subsequent agricultural production activities. Taghia et al. [15] developed a sliding mode controller with a nonlinear perturbation observer, and the new controller performed better when slip occurred compared with backstepping controllers and model predictive controllers. 开发了一种带有非线性扰动观测器的滑模控制器,与反步控制器和模型预测控制器相比,新控制器在发生滑移时表现更好。Ding et al. [16] constructed a second-order sliding mode (等人[40]为拖拉机路径跟踪系统构建了一个二阶滑动模式(SOSM) controller for a tractor path tracking system, fully considering longitudinal and lateral wheel slips. )控制器,充分考虑了纵向和横向车轮打滑。Ji et al. [17] proposed a novel adaptive second-order sliding mode controller (等[41]提出了一种新型自适应二阶滑模控制器(ASOSM), which alleviates the chattering problem in traditional sliding mode control and improves the convergence speed and anti-interference ability of the system. ),缓解了传统滑模控制中的抖振问题,提高了系统的收敛速度和抗干扰能力。Ge et al. [18] proposed a novel adaptive sliding mode control (等人[42]提出了一种新的自适应滑模控制(ASMC) method for path tracking of unmanned agricultural vehicles. This method is robust in the presence of parameter uncertainty, disturbances, and changing road conditions. During the straight)方法,用于无人驾驶农用车辆的路径跟踪。该方法在存在参数不确定性、干扰和不断变化的路况的情况下是稳健的。在拖拉机直线运行过程中,稳定的高速行驶会提高其工作效率,但在地面上转弯时,应降低行驶速度,以提高转向的稳定性并减少转弯距离。然而,受复杂环境和不确定的外部扰动的影响,当拖拉机速度提高时,拖拉机-line operation of the tractor, stable high-speed driving will improve its work efficiency, but when turning on the ground, the driving speed should be reduced to improve the stability of the steering and reduce the turning distance. However, influenced by complex environments and uncertain external disturbances, when the tractor speed increases, the defects such as nonlinearity, hysteresis, and instability of the tractor-field path system become more prominent, which will affect system performance. Combined with optimal control theory, Han et al. [19] designed a dual-parameter optimal control algorithm based on speed and steering angle. 田间路径系统的非线性、滞后、不稳定等缺陷变得更加突出,这将影响系统性能。结合最优控制理论,Han等[43]设计了一种基于速度和转向角的双参数最优控制算法。Zhang et al. [20] designed a dual objective joint sliding mode control algorithm to solve the influence of tractor speed on the performance of the navigation control system. The field test platform of the tractor’s automatic navigation control system is shown in Figure 等[44]设计了一种双目标联合滑模控制算法来解决拖拉机速度对导航控制系统性能的影响。拖拉机自动导航控制系统的现场试验平台如图3. This algorithm achieves adaptive adjustment of speed while ensuring stable straight-line path tracking.所示。该算法实现了速度的自适应调整,同时保证了稳定的直线路径跟踪。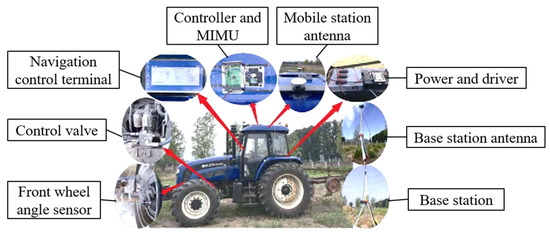
Figure 3. Tractor automatic navigation control system test platform.
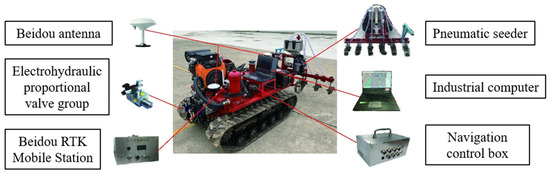
Figure 4. Automatic navigation system for crawler-type rape seeder.
2.2. Paddy Field Agricultural Machinery
In the muddy and slippery rice field environment with uneven ground, compared with dry field agricultural machinery, paddy field machinery such as rice seeder and rice transplanter are more prone to sideslip, and even rolling and pitching, increasing the difficulty of automatic navigation of agricultural machinery. Most existing unmanned rice field agricultural machinery takes the front of the vehicle as the measurement and control object. There is a gap between the front machinery and rear implements, and the motion posture of the rear implements changes greatly relative to the front machinery, causing inconsistent travel trajectories between the front and the rear, leading to a decrease in straight-line operation accuracy and quality. In response to the above problems, He et al. [31][55] developed an unmanned path-tracking control method for agricultural rice machinery based on model predictive control based on the pose estimation of agricultural rice machinery. The experimental results indicate that this method can effectively suppress abrupt lateral position deviations caused by the relative position and attitude changes of the machine. Wei et al. [32][56] used GPS receivers and onboard sensors to gain the position and attitude information of rice transplanters and used the PID control method to construct a closed-loop steering control system, which achieved automatic navigation and headland steering of rice transplanters. In the research on the automatic driving of rice seeders, Zhang et al. [33][57] proposed a control strategy that uses fuzzy logic to adjust the PD controller parameter Kd adaptively. Compared with the PD controller with fixed parameters and the pure pursuit model control method, this method has a smaller overshoot, better robustness, and faster response speed. Tang et al. [34][58] and Shi et al. [35][59] established a fuzzy control model to adjust the look-ahead distance of the pure pursuit model in real-time. This method is adaptable to different vehicle speeds and can avoid oscillations when the rice transplanter operates at high speed, effectively improving the system’s robustness. Wu et al. [36][37][60,61] designed a fast terminal sliding mode controller with a nonlinear disturbance observer, which can improve the anti-interference ability of rice seeders in paddy fields. The automatic driving control system of the rice seeding machine is shown in Figure 5. Chi et al. [38][62] linearized the kinematic model of the rice transplanter in Taylor series form and developed a path-tracking controller using a model prediction algorithm, which can track linear and curve paths.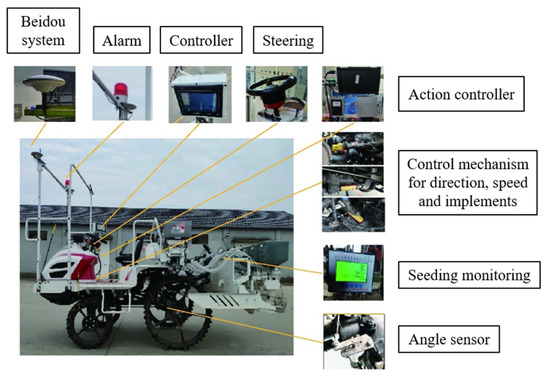
Figure 5. Automatic driving control system for rice seeding machine.
2.3. Orchard Agricultural Machinery
In the case of labor shortage and rising labor costs, the development of autonomous orchard agricultural machinery is helpful in reducing the labor intensity of orchard farmers and improving the efficiency and quality of orchard operations. Bayar et al. [43][67] proposed a model-based control method for orchard autonomous agricultural vehicles, which calculates the velocity and wheel angle based on the vehicle kinematics model, thereby improving the path tracking accuracy. Thanpattranon et al. [44][68] developed a navigation system suitable for curve path tracking in orchards, and the average deviation of path tracking during the experiment was 0.275 m. Based on RTK-BDS positioning technology, Xiong et al. [45][69] developed a straight-line path-tracking controller for the orchard sprayer. When the sprayer speed is 2 km/h, the maximum linear tracking deviation is 0.13 m, and the average tracking deviation is less than 0.03 m, which can effectively achieve accurate straight-line path tracking of the orchard. To ensure the high robustness and speed adaptability of the navigation controller, Xue et al. [46][70] developed an orchard tractor path-tracking controller. Simulation test results showed that the controller can track the straight line, and when the tractor turns, the average lateral errors at 2.5 m/s and 5 m/s are 7 cm and 13 cm, respectively. Opiyo et al. [47][71] designed a machine vision navigation system based on the central axis for autonomous orchard robots, and the fuzzy controller with heading and error as input can well track the medial axis. In the study on path tracking of orchard tractors, Wu et al. [48][72] used the look-ahead distance fuzzy adaptive pure pursuit model to calculate the expected wheel angle. In addition, to cope with the soft road surface of the orchard and the vibration of the tractor itself, the feedforward control is added to the pure pursuit model control to minimize the sideslip. To achieve automatic driving of agricultural machinery in orchards, Zhang et al. [49][73] developed an autonomous orchard vehicle system using a two-dimensional laser, which utilizes fuzzy control to adjust the look-ahead distance of pure pursuit model dynamically. The structure of the orchard vehicle automatic platform is shown in Figure 6. Orchards have a high planting density, and low and narrow working passages, and small tracked tractors have the advantages of small size and strong terrain adaptability, which are widely used in orchards [50][74]. Liu et al. [51][75] designed a path-tracking algorithm using a virtual radar model for small, tracked tractors. The algorithm describes the relative position between vehicles and paths with a virtual radar map and generates driving instructions through a deep neural network to control the tractor. Compared with the fuzzy control algorithm, this algorithm has higher accuracy and driving stability and has better adaptability to orchard working paths.
Figure 6. Orchard vehicle automatic test platform.
2.4. Agricultural Robots and Facility Agricultural Machinery
Autonomous agricultural robots are widely used in pesticide spraying, weeding, planting, and field biological and environmental information collection. The ground conditions constantly change during the steering process, making it difficult to establish accurate mathematical models for controlled vehicles. In the research of agricultural wheeled robot path tracking, Li et al. [52][76] introduced a radial basis function (RBF) neural network to estimate the uncertainty disturbance in real-time and then designed an adaptive sliding mode control method, which can improve the system robustness while reducing chattering. Gökçe et al. [53][77] used a PID control strategy to control the agricultural robot and optimized the controller parameters through the PSO algorithm. In order to adapt to changes in speed and road, Sun et al. [54][78] proposed an improved path-tracking control algorithm based on the fuzzy Stanley model (FSM) and PSO. Cui et al. [55][79] proposed an improved Stanley model path-tracking algorithm based on the fuzzy algorithm, which adjusts the gain coefficient in real-time. In the above research on the improvement of the Stanley model algorithm, the fuzzy algorithm improves the tracking accuracy of the automatic turning, and the particle swarm optimization algorithm can further optimize the front wheel steering angle and decision-making. The agricultural tracked robot is a multi-input and multi-output system, having the characteristics of time-varying, nonlinearity, and uncertainty, which is easily affected by parameter disturbance, thereby causing negative impacts on the system [56][80]. Song et al. [57][81] designed a path-tracking strategy based on heuristic dynamic programming (HDP) for tracked agricultural robots, which can accurately track multiple complex straight-line paths. The sliding mode control method can adjust the uncertainties and parameter disturbances in the system and track the path in an exponentially convergent manner [58][82]. Li et al. [59][37] designed a tracked robot path-tracking system on the basis of a sliding mode variable structure algorithm. The autonomous mobile operating platform in agricultural facilities can undertake tasks such as autonomous working and autonomous transportation of agricultural materials, which plays an important role in the development of facility agriculture. The space in agricultural facilities is small, and the mobile operating platform needs to change the driving direction frequently. Wang et al. [60][83] designed an automatic tracking platform for greenhouse fruit and vegetable picking and transportation based on Kinect sensing technology. The system uses the pure pursuit model method to track the expected path and uses the fuzzy algorithm to determine the look-ahead distance dynamically. In order to adapt to the rectangular path tracking working conditions, Yao et al. [61][84] used ultra-wideband (UWB) wireless positioning technology to obtain high-precision positioning information of the mobile platform and proposed a dynamic look-ahead distance determination method based on the deviation. The improved pure pursuit model algorithm can meet the demand for automatic navigation of mobile platforms in agricultural facilities. Chai et al. [62][85] improved the pure pursuit model by PSO and selected the optimal look-ahead distance according to the platform’s real-time position. Based on the kinematic model of a 4WIS-4WID vehicle, as shown in Figure 7, Xu et al. [63][86] calculate the optimal look-ahead distance using a fuzzy algorithm.
Figure 7. Test prototype and test environment.
2.5. Agricultural Articulated Vehicle
Articulated vehicles mainly consist of two parts, the front, and the rear, connected by a rigid hinge body in the middle. The structural characteristics of the articulated vehicle not only reduce the turning radius, but also ensure the adhesion between the tire and the ground in rough terrain, making them suitable for transportation operations in non-structural rough terrain. Agricultural wheeled articulated vehicles experience severe vibrations when driving on rough terrain such as farmland. Compared with the traditional front-axle steering structure, the steering structure of the articulated vehicle allows both the front and the rear car body to move relative to the ground during the steering process, which increases the difficulty of path tracking. Zhao et al. [68][91] proposed a sliding mode variable structure path tracking controller for articulated agricultural vehicles. To suppress chattering, the symbolic function was replaced by a continuous function, and the Lyapunov function was used to prove its stability. Shao et al. [69][92] proposed an adaptive PID controller, which used the reinforcement learning algorithm to tune PID parameters adaptively. Reinforcement learning adaptive PID controllers have smaller overshot and vibrations than traditional ones so that the articulated vehicle can track the predetermined path more accurately. To improve the response speed of articulated agricultural vehicles, Meng et al. [70][93] proposed a linear quadratic regulator-genetic algorithm (LQR-GA) path-tracking method based on preview information. Preview information can improve the system response speed, and the genetic algorithm can optimize the control effect. In order to keep the tractor and trailer on the same working trajectory, 为了使拖拉机和拖车保持相同的工作轨迹,Backman et al. [14] designed a nonlinear model predictive path-tracking controller for the tractor-trailer system. During the straight-line path tracking, the lateral error of the trailer is much less than 等人[38]为拖拉机拖车系统设计了一种非线性模型预测路径跟踪控制器。在直线路径跟踪过程中,拖车的横向误差远小于10 cm. To improve the trajectory tracking performance of autonomous tractor-trailer systems, 厘米。为了提高自动拖拉机拖车系统的轨迹跟踪性能,Kayacan et al. [71] combined fast-distributed nonlinear model predictive control with nonlinear movement level estimation for state and parameter estimation. The small agricultural tractor–trailer system is shown in Figure 等人[94]将快速分布非线性模型预测控制与非线性运动水平估计相结合,用于状态和参数估计。小型农用拖拉机拖车系统如图8. The proposed method can improve the path所示。该方法可以提高拖拉机-tracking accuracy of tractor-trailer systems and robustness to environmental disturbances. Apart from the development and improvement of control methods by the researchers mentioned above, commercial companies have proposed commercial solutions for autonomous tractor-trailer systems, such as John Deere’s iGuide and 拖车系统的路径跟踪精度和对环境干扰的鲁棒性。除了上述研究人员对控制方法的开发和改进外,商业公司还提出了自动拖拉机拖车系统的商业解决方案,例如约翰迪尔的iGuide和iSteer and 以及Trimble’s 的TrueGuide. The difference between iGuide and 。iGuide和主要用于直线路径跟踪的iSteer, which is primarily used for straight-line path tracking, is that iGuide is a passive guidance solution where the implement does not have a steering system, while iSteer is an active guidance solution where both the tractor and the implement have a steering system.之间的区别在于,iGuide是一种被动引导解决方案,其中机具没有转向系统,而iSteer是一种主动引导解决方案,其中拖拉机和机具都有转向系统。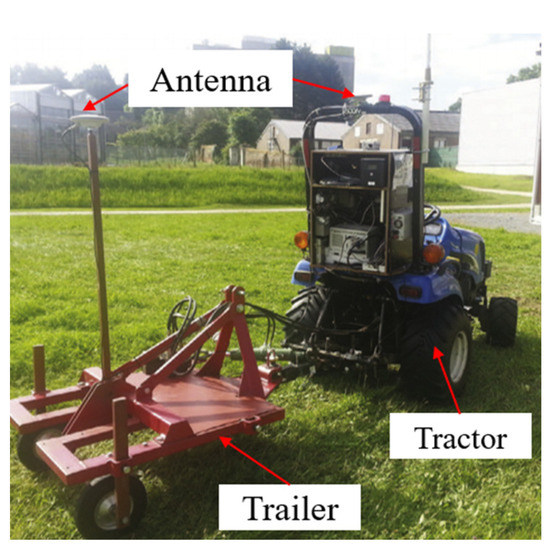
Figure 图8. The tractor-trailer system. 拖拉机拖车系统。