1. Introduction
Since the spread of the e-market, consumers’ behaviours have widely changed, thus influencing traffic freight flows
[1][2][3]. Concerning freight logistics, a declared objective of the European Community regards the transfer of 30% of road and combined road–rail freight to short sea shipping
[4].
Moreover [5], a competitive advantage emerged in using maritime services instead of the road for freight flows. Thus, disruption management for freight flows became a critical issue in our economies. In this sense, the maritime infrastructure and operations efficiency within the terminal area represents a crucial point in logistics corridors for the ro-ro terminals. Ro-ro traffic activities and maritime port operations represent an interesting field of research for freight distribution and passenger mobility. In 2021 in Italy
[6], ro-ro terminals accounted for 6,299,321 units (trucks and semi-trailers), with an increase of 23% compared to 2020 (5,113,112 units) and 11% compared to 2019 (5,618,282 units); in this sense the integration between physical and digital infrastructure as well as the management system of the port results of interest in optimizing freight distribution.
Ordinary disruptions may be caused by interfering operations, traffic conditions or other events. Deviation from the fixed scheduling causes consumer dissatisfaction and affects infrastructure efficiency. Moreover, truck companies are susceptible to delays, and this sensitivity increases when fleets and cargoes have to deal with perishable products. Transportation companies look favourably to innovation introduced by automated vehicle fleets and coordination and control introduced by connectivity
[7].
On the other side, operators and public administration who deal with the impacts of distributive logistics (pollution, traffic jams, accidents, safety and security, level of services) must maintain active corridors, also offering satisfactory development conditions to the area. In light of this evidence, as directive 2010/40/EU and the “5G Action Plan” indicated, technological innovations derived from connectivity and information open the path for integrating new mobility solutions in every transport sector. Moreover, developing the latest Advanced Driver Assist Systems (ADAS) generation signed the path toward on-road vehicle automation or full automation [8][9]. In accordance with the Society of Automobile Engineers (SAE) standards, SAE J3016
[10], the automated vehicles classification includes five levels.
Levels 1 and 2 provide some support features for driving; on the contrary, a system capable of performing the entire dynamic driving task comprises classes 3 up to 5. Vehicles autonomously drive at levels four and five, taking over human actions. The progressive introduction of driver assistance and automated vehicles will favour the development of a digital infrastructure capable of interacting with users and operators. In the smart road domain, the intention is to develop a dedicated short-range communication system (DSCR) for the full implementation of digitization through communication protocols, such as Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I), thus improving traffic safety, convenience and energy efficiency
[11][12]. Communication among vehicles vouches for awareness, platooning strategy for trailer trucks
, and heavy goods vehicles
, and cooperative manoeuvres. On the other hand, communication with infrastructure enables information, instructions and negotiation
[13]. The best departure time, optimal route, flow regulation, optimal speed and density can be managed, also delivering information on the best time to recharge in accordance with the timetable and log way trips
[14]. Thus, in general, connected vehicles (automated and connected) have the potential to increase infrastructure capacity and harmonize traffic conditions.
2. HConnected Vehicles and Digistortal Infrastructures for Assessing the Port Efficiency
The necessity to move to full automation in freight logistics is higher than in passengers to limit the power force and costs and achieve better performance on time and numbers of deliveries. In the future, automation will represent the standard among all carriers
[7]. Consequently, autonomous commercial vehicles such as trucks are expected to be available before autonomous cars for individuals; therefore, autonomous driving in the maritime terminal is expected to materialize soon
[15]. Nevertheless, this expectation could be delayed, and approximation may suffer from different degrees of market penetration. T
he 100% full automati
ll ton still represents a far-distant future. Till today, close to a mind-off transition period, concepts of integrating autonomous freight vehicles into traffic systems require separated traffic lines, free route choice or fixed paths in mixed traffic conditions
[16].
Furthermore, safety issues must be quoted as one of the most questioned spots regarding acceptance rates for connectivity. Ports, cities and authorities have a role in developing the context where autonomous and connected vehicles may operate. Then [16], main challenges to be tackled concern infrastructural requirements, regulations, data protection and communication protocols.
The context of maritime terminals has interested many researchers who focused on several approaches to test and increase performance at the terminal. The approaches vary for the analytical method and the degree of granularity, however
, discrete-event simulation (DES), in general, has always represented a popular approach among researchers
[17], and many studies focus on its application in solving phenomena related to the management of maritime terminals. In the field of ro-ro terminals (albeit in a much smaller way), discrete-event simulation has been of interest to a wider audience of researchers who dealt with the management of landside and seaside arrivals; to optimize scheduling and allocations problems so long as in a ro-ro terminal, trailer trucks and vehicles cannot usually be stacked for limited spaces and due to the nature of the trips and freight on board. Preston et al.
[18] by means of DES, tested the residual capacity in the e-roll-on-roll-off ferry port located in Dover (UK). The simulation approach was used to organize what-if scenarios under the hypothesis of ordinary disruptions and increasing demand. As KPI, the author utilized both queue time at the gate and pollutant emissions. Iannone et al.
[19] assessed the impact of managerial decisions about loading, unloading and storage allocation. They conducted a discrete-event simulation assessing for each alternative the economic impact of each alternative and pollutant emissions. Kaceli
[20] used simulation in the contest of a ro-ro terminal to predict planning scenarios and determine the necessary infrastructural needs. Even more, as stated by Ozkan et al.
[21], ro-ro terminal operations specifically needed a focus on timetable coordination and scheduling, thus integrating different levels of communication. As a consequence of this, at least three variables of interest resulted: the number of trucks arriving at terminals, the distance between terminals and Ro-Ro ship capacity. Abourraja et al.
[22][23] discussed the problem of flexibility in decision-making in the context of a ro-ro terminal. In it, they proposed a generic framework to be used as a tool for specific decision support models at the terminal. The assessing method was addressed utilizing different KPIs, such as workload, time and distance. Park et al.
[24] proposed an automated solution with the use of Automatic Guided Vehicles (AVG) for a ro-ro terminal. The model analyzed the economic benefits of introducing AVGs, thus assessing the achieved level of productivity. Varying the number of available AVGs, the queue time was used as KPI to optimize the number of vehicles and average waiting time. Muravev et al.
[25] mainly focused on DES as an operative tool to test the effectiveness of the proposed solution. They modelled the operation for a ro-ro terminal using two different software packages (Arena and AnyLogic) and considered model scalability.
Finally, Sharif et al. [26] focused their work on environmental sustainability linked to the queuing time at the maritime port. The experimental analyses were carried out by means of an agent-based approach to reproduce daily activities in the terminal areas. Output stated that live information and operation coordination and routing info might reduce the effects of congestion. Parola and Sciomachen [27] focused on logistics chain sustainability and evaluated the performance of a multimodal container port. The simulation problem was implemented with the aim of measuring congestion phenomena in the road and rail network. Coordination among the different stakeholders resulted in being the main goal to pursue to favour a modal re-equilibrium, whereas van Vianen et al. [28], considering the case of intermodal transport, developed a DES model to schedule stackers’ operations (for example, assigning the stacker to a ship or to a train). Handling and operative time were used as KPI to assess the achieved performance with a specific layout solution.
On the other hand, container ports, in general, have always represented the most interesting field of application due to the higher level of transport demand and daily operation. In this sense, truck control arrivals and the management of yard slot allocations were widely debated among academics. For example, Jovanocic
[29] designed a TAS in the context of two container ports (Los Angels and Seattle (USA). A scheduling problem is defined in it, and the corresponding integer programming model is developed from the truck driver’s perspective to increase user satisfaction. Similarly, Azab et al.
[30] developed a TAS to achieve a higher level of workload. The proposed algorithm evaluated the best truck arrivals schedule to minimize the total costs of both the terminal and the trucking companies. Performances were tested by measuring truck turnaround time and length of queues.
Furthermore, Neagoe et al. [31] used a DES
, developed in Python, to simulate and to assess the intr
isurin et aloduction of a TAS in a container port located in Australia. As output, the impacts of congestion (truck queue and emissions), also concerning the increasing of terminal activities, were measured.
The performance indicators were multiple (truck turn-around times, waiting times, turnaround time reliability and engine idling emissions). Nadi et al. [32] introduced an advisory-based time slot management system (TSMS) to control truck arrivals. In it, discrete choice modelling is used to analyze the expectations and preferences of the truck operating companies. Then stated preferences are used to shift track arrival in the off-peak period. The DES is applied to assess the effectiveness of the designed TSMS. Srisurin et al. [33] simulated daily activities within the terminal area to assess terminal capacity in terms of handling, allocation and where house options. Performance was tested under six scenarios whose nature varies from tactical measures to planning policies and solutions. A further detail of granularity was of interest to Schoroer et al.
[34], who developed an Inter Terminal Transport system in the terminal of Rotterdam accounting for different solutions and machines. Both priority and first-in-first-out (FIFO) strategies were tested during the simulation, and mean delay per ride was used as KPI to test the effectiveness of the configuration.
Infrastructural planning and terminal capacity are crucial topics, and several researchers focused on productivity. Rusca et al.
[35] utilized discrete-event simulation for investigating performance in a container port through berthing capacity and for operative planning of logistic processes under different arrivals flows. Carteni and De Luca
[36] addressed port container performance through simulation of the handling activities. Results validation was carried out for short- and long-term planning horizons by evaluating local and global performance indicators.
Cimpeanu et al. [37] introduced DES to predict and evaluate long-term planning performance by assessing berth occupancy and financial costs of the investment for a container port in Ireland. Finally, Li et al. [38] dealt with the disruption for both land and sea-side. The
resilience of the terminal is addressed in terms of total truck waiting time and idling emissions. DES was
used to conducted to test achieved performance in terms of sensitivity analysis, whereas Alvarez et al. [39] obtained progressive planning and decisions on how to allocate berth space by assessing the potential benefits of new berthing policies. The DES was used to model the environment and subsystem characteristics, operations and performance indicators (for the land-side equipment, contractual agreements
, and associated penalties
, and berthing policies). Triska et al.
[40] also dealt with port capacity assessment. The simulation was carried out with the Monte Carlo technique and tested in a DES model. The authors studied economic and operational criteria for the port capacity (berths, storage slots and truck gates). The gate performance and the optimum number of the server were at the basis of the works developed by Guan and Liu
[41][42]. The paper applied a multi-server queuing model to analyze marine terminal gate congestion and an optimization model was developed to balance gate operation costs and truckers’ waiting time. The introduction for a truck appointment system resulted as the best option to introduce.
An agent-based approach at the basis of the planning and capacity of the system for both Assumma and Vitetta
[43] who simulated loading and unloading operations and Fleming et al.
[44] who focused on pooled queue strategies.
Finally, concerning traffic at the maritime port, several researchers focus on TAS only simulating terminal process recurring to the Genetic Algorithm (GA) and the Queue theory [45][46][47][48][49]. Table 1 synthetically reports main feature of the previous work concerning performance and simulation methods for both ro-ro and container terminals.
Table 1. Classification of the literature review (source: by the authors).
| Paper |
Terminal |
Simulation Approach |
Software |
Model Scope |
| Preston et al. |
ro-ro |
DES |
not stated |
Planning; Capacity |
| Iannone et al. |
ro-ro |
DES |
ARENA |
Planning Areas |
| Kaceli |
ro-ro |
DES |
ARENA |
Gate; Yard Capacity |
| Muravev et al. |
ro-ro |
DES |
ARENA; AnyLogic |
Scehduling; Capacity |
| Ozkan et al. |
ro-ro |
DES |
not stated |
Sched.; Coordination |
| Abourraja et al. |
ro-ro |
DES |
not stated |
Bert; Yard Capacity |
| Park et al. |
ro-ro |
DES |
not stated |
AVGs Introduction |
| Yang et al. |
| Container |
| Queue Theory |
50][51]. The architecture is therefore designed to manage four specific aspects such as priority and negotiation, routing info, gate info and yard occupation as follows:
-
the transport companies send their daily plan to the terminal operator, pointing out the nature of the freight (dangerous, perishable, general merchandise, ...); they have to confirm the number of trucks, the platoon scheme, the desired shipping company and the naval service to board on;
| Sharif et al. |
| ro-ro |
| Agent-Based |
| NetLogo |
Capacity; Info |
| van Vianen et al. |
Multi-Modal |
DES |
not stated |
Stackers operations |
| Parola and Sciomachen |
Multi Modal |
DES |
Witness |
Coord. Modal Shift |
| Jovanocic |
Container |
DES |
not stated |
Truck Arrivals System |
| Azab et al. |
Container |
DES |
FlexSim CT |
TAS; Congestion |
| Neagoe et al. |
Container |
DES |
Python |
TAS; Handling |
| Nadi et al. |
Container |
DES |
not stated |
TSMS |
| Srisurin et al. |
Container |
DES |
SIMIO |
Slot Allocation; Hand. |
| Schoroer et al. |
Container |
DES |
Delphi |
Internal Transport |
| Rusca et al. |
Container |
DES |
ARENA |
Planning; Capacity |
| Carteni and De Luca |
Container |
DES |
Witness |
Planning; Capacity |
| Cimpeanu et al. |
Container |
DES |
Witness |
Planning; Berth Occ. |
| Li et al. |
Container |
DES |
not stated |
Bert; Yard Capacity |
| Alvarez et al. |
Container |
DES |
C ++ |
Bert; Yard Capacity |
| Triska et al. |
Container |
Monte Carlo |
MatLab |
Bert; Gate; Storage |
| Guan and Liu |
Container |
Queue Theory |
not stated |
Gate Capacity; Servers |
-
vehicles receive routing information from smart road devices installed in the corridors and the terminal cloud system through a communication protocol, the same reports about traffic conditions around the infrastructure, queue estimation in the buffer area, vessel approaching and final direction;
| Assumma and Vitetta |
| Container |
| Agent-based |
| ARENA |
| Planning |
| Fleming et al. |
| Container |
| Agent-based |
| NetLogo |
| Planning; Capacity |
| Chen et al. |
| Container |
Genetic Algorithm |
not stated |
TAS |
| Ambrosino and Peirano |
Container |
Linear Optimization |
C# |
TAS |
| Mihn et al. |
Container |
Genetic Algorithm |
not stated |
TAS |
| Minh and Huynh |
Container |
Genetic Algorithm |
not stated |
Congestion |
| not stated |
Slot Allocation; Waterway |
Overall, in a long-term perspective, the general architecture presented in the following paragraphs should be considered as a management tool at the services of the public administration and terminal operators to manage ordinary processes and emergencies
[-
-
the planned route, the next vessel berthing and available space are stored in the system; moreover, to avoid long waiting, the system coordinates approaching and manoeuvres as well corridors assignment;
-
the terminal area is provided with a stable cloud monitoring system equipped with roadside units and an optimization traffic control system that enables communication highlighting yard occupation (of the buffer area) and the number of vehicles waiting for the embankment.
As a primary step towards this integration, this paper focuses on developing an operational framework to manage arrivals in the terminal whose primary aim is to improve the efficiency of landside operation to reduce waiting time in the system.
3. AExpplication erimental analysis
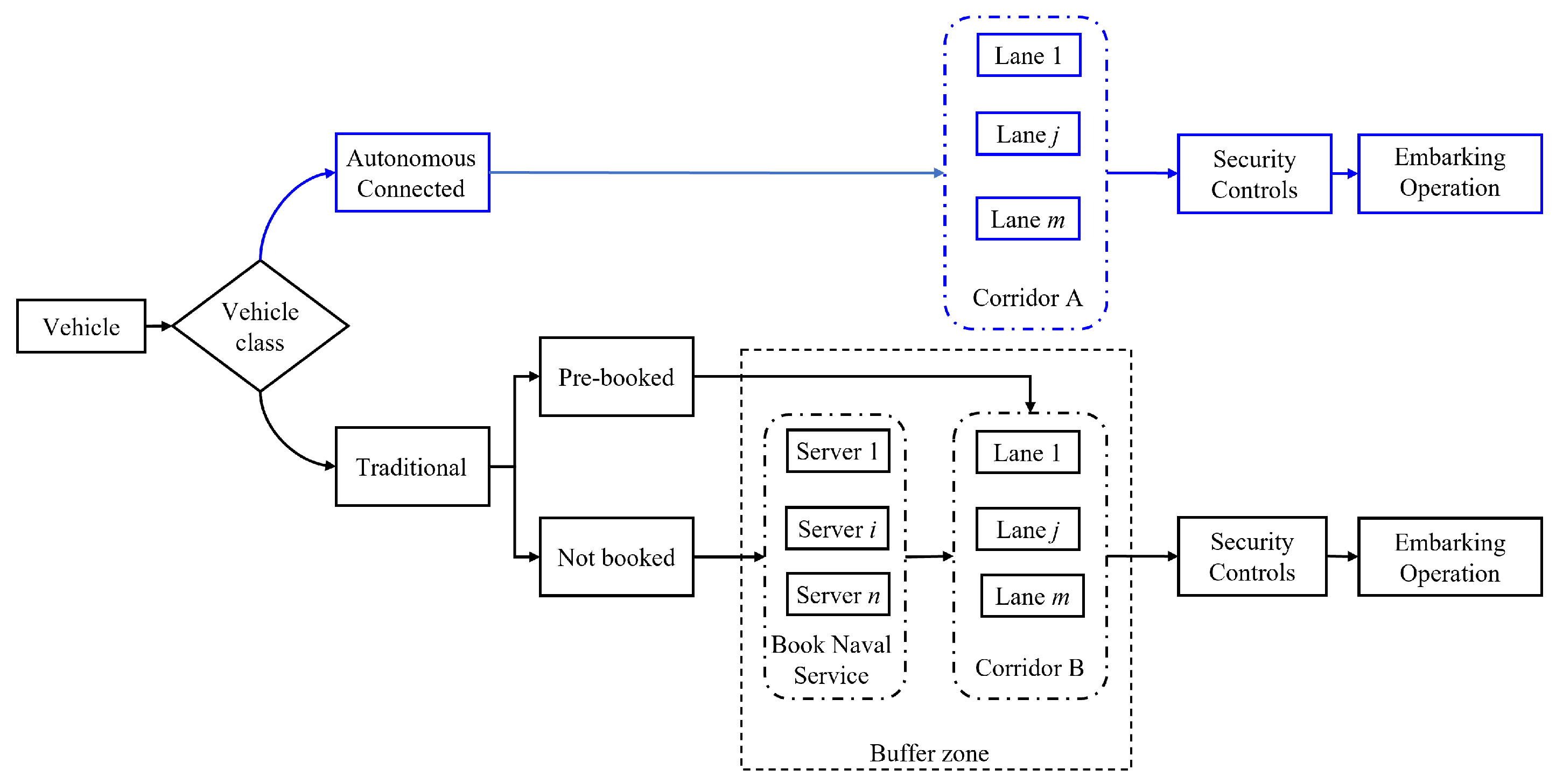
A discrete-event simulation lets the analyst simulate what-if scenarios under different traffic conditions to test the efficiency of tactical solutions and prevent congestion phenomena affecting the terminal. Figure 1 represents the synthetic scheme of operations for a vehicle arriving at the terminal. The flow diagram depicts the main steps into the system, such as registration and priority class assignment, and subsequently go through different paths before leaving the terminal area.
Figure 1. Simplified scheme of the Port of Tremestieri (source: by the authors).
A generic vehicle approaching the port passes through an approach corridor equipped with automatic number plate recognition (ANPR) sensors. Therefore, the system matches in the archive if the incoming vehicle has already confirmed its presence and, in the affirmative case, classifies it as autonomous/connected; otherwise, it is identified as a traditional vehicle. The former proceeds to the inner area of the terminal (in an established lane of the corridor A following variable message) and, according to security controls, it continues up to the internal buffer area ready for the embarking operation. Inside the buffer zone, traditional vehicles were further differentiated in pre-booked and not booked. The first subgroup directly reaches the first available slot in the queuing lanes in the corridor B. Non-booked vehicles have to choose (according to FIFO regulation) a server for ticket operation, reserving their slot in the first available vessel. Once the ticket operation is completed, they reach the proper lane, waiting to be called in the inner area of the terminal for embarking operation (after eventual security controls). Once vehicles are organized in groups, they receive information on the next step and path to the embarking area.
The key performance indicators chosen in our simulation foresee, for different vehicles class, the average time needed to be ready for the embarking operation. Further analysis on the average waiting time in the system (for vehicle class) also lets us know the average number of arrivals served on the first available vessel.
4. ProgreDiscussion
The general framework described in this paper, exploiting the discrete-event simulation, contributed to the research by focusing on the importance of efficiency in critical infrastructure such as a maritime terminal and highlights the importance of digitization for physical infrastructure, thus representing a valid tool in supporting the decision process. In more detail in this paper, a case study on managing landside operations at the maritime terminal of Messina-Tremestieri has been illustrated to demonstrate how the proposed modelling framework can simulate daily traffic conditions, taking into account the effects of the introduction of automated/connected vehicles.
As stated, it moved from previous direct observations in the terminal areas. Its main scope was to evaluate the possibility of improving port efficiency using regulation strategies and new planning solutions, thus reducing the cyclical queue phenomena observed during on-field analyses. The highlighted benefits reside in the reduction of the total in-time system. Consequently, overall transportation time and related costs can be reduced.
The simulation was run multiple times to test the system’s capability to deal with variable traffic conditions over the 8 hours of the peak period. These multiple discretesimulations measured the number of served vehicles, the average in time-system for the different vehicles with different priority classes, and the effective loading request on vessels, representing a proxy for the average occupancy rate for the buffer area. The discrete-event approach allowed the simulation of vehicles’ arrivals in the terminal area and addressed incoming flows by organizing priorities. The framework included a buffer zone to be used as a basin for traditional vehicles to prevent overcrowding of the yard area. Concerning the automated vehicles, the proposed procedure assigns them a dedicated corridor and a high priority. The performances achieved through simulation are promising; embarking factors showed that the solution is stable. Most vehicles were embarked on the desired vessel. The cumulative number of served vehicles is higher than the values observed so far by the monitoring system, so we can assume that the proposed framework offers good performance. Furthermore, the simulated regulation will enable the terminal operator to serve an additional surplus of traffic. Introducing the pre-booking system for autonomous vehicles helps manage access at the terminal, taking into account the residual capacity to embark on vessels. Regulation strategy based on priority class and reservation to specific naval services resulted in an adequate solution for embarking vehicles on the first available vessel, thus reducing waiting time in the terminal area. Introducing a buffer zone outside the terminal helpfully reduced long queues in the inner areas.
Thus, it achieved a twofold objective. First, in line with the intervention proposal planned by the public administration, the proposed scenario assessed the effect of introducing an external buffer zone and a new regulation for the operations within the terminal area. The achieved performances were tested by using as key performance indicators the total time in the system and the embarking factor on vessels, thus highlighting the possibility of reducing the ordinary disruption and low performance at the maritime barrier that, as stated, represents a crucial node for the area’s economy. Finally, the further value of this study resides in the field of sustainability for both users and logistics operators who could benefit from more precise regulation and certainty of operations at the terminal, thus avoiding long waiting. Through rese implemervation and negotiation for the higher priority classes of freight vehicles, the proposed framework also remarked on the benefits of introducing an advisory based arrival system to foresee and control the incoming presences at the terminal. The implementation of the proposed framework contributes to the field of sustainable transportation (as recognized by United Nations in proposing the goal number 11, a sustainable transport system plays a primary role in the sustainable development) providing a decision support system to mitigate effects due to queues (reducing pollutant emissions and noise) and to increase efficiency of maritime transport by optimizing the load level of the vessels.
The proposed model used a breakdown of vehicle classes that are in line with the current arrivals (estimated by the on-field survey): a limitation of this study is that no further analyses have been conducted on future demand scenarios. Neither has a study on innovation regarding the vessel supply been performed, and cargoes refer to the on-service vessels. A further simplification of the study resides in seaside approximation: in fact, in our solutions the values of the supply are derived by daily scheduling, whereas the stochastic nature of vessel arrivals would require a specific seaside model for berth allocation.