Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 2 by Rita Xu and Version 1 by zhenyu yang.
This paper describes a hybrid AI and rule-based intrusion detection system for detecting SOME/IP communication threats in new automotive electronic electrical architectures
This research describes a hybrid AI and rule-based intrusion detection system for detecting SOME/IP communication threats in new automotive electronic electrical architectures.
- intrusion detection system
- SOME/IP
- deep learning
1. Introduction
With the continuous evolution of the Internet of Things (IoT), the vehicle has become an indispensable part [1]. The trend of IoT leads to the introduction of information technology (IT), software-defined networking (SDN) [2], and service-oriented architectural design concepts, which give automotive applications great flexibility to deploy, update, and expand the introduction of information technology (IT), and service-based architectural design concepts give automotive applications great flexibility to deploy, update and expand [3]. A large amount of external data enters the IVN through wireless technologies, such as Wi-Fi, Bluetooth, ZigBee, dedicated short-range communication (DSRC), and long-term evolution (LTE). Diverse upper-layer applications, such as safety-related, entertainment-related, and control-related applpications [4], also put forward new requirements for the backbone of the IVN. In addition to high speed and high bandwidth, the in-vehicle network also needs to be redundant, scalable, real-time, deterministic, and secure, which cannot be provided by traditional in-vehicle buses such as CAN, local interconnect network (LIN) and media-oriented system transport (MOST). The automotive Ethernet (AE) solves the electromagnetic compatibility problem using traditional Ethernet in the vehicle environment [5]. The above requirements can be satisfied by optimizing and multiplexing the protocols of different layers in the OSI model to the AE [6]. BMW proposed the SOME/IP protocol in 2011 as a critical protocol for solving service-oriented communication and was incorporated into the AUTomotive Open System Architecture (AUTOSAR) specification in 2014. Kreissl [7] obtained the vulnerability of SOME/IP through threat analysis, and some studies have proven that the in-vehicle network can be hacked through external interfaces (Bluetooth, WIFI), operating system vulnerabilities, or malware [8,9,10,11][8][9][10][11]. It is evident that SOME/IP has security risks and needs corresponding security measures.
2. Vulnerability of SOME/IP
SOME/IP is built on the TCP/UDP protocol and is located above the fourth layer of the OSI model. Its purpose is to define a unified middleware for IP-based communication within the vehicle. SOME/IP is one of the critical components to realizing the in-vehicle network communication under the service-based architecture.2.1. SOME/IP Overview
The communication based on SOME/IP is divided into two phases. The first is the service discovery process, specified by SOME/IP Service Discovery Protocol [47][12], and the second is the normal communication process, specified by SOME/IP Protocol [48][13]. The SOME/IP-SD message and SOME/IP message format are shown in Figure 1.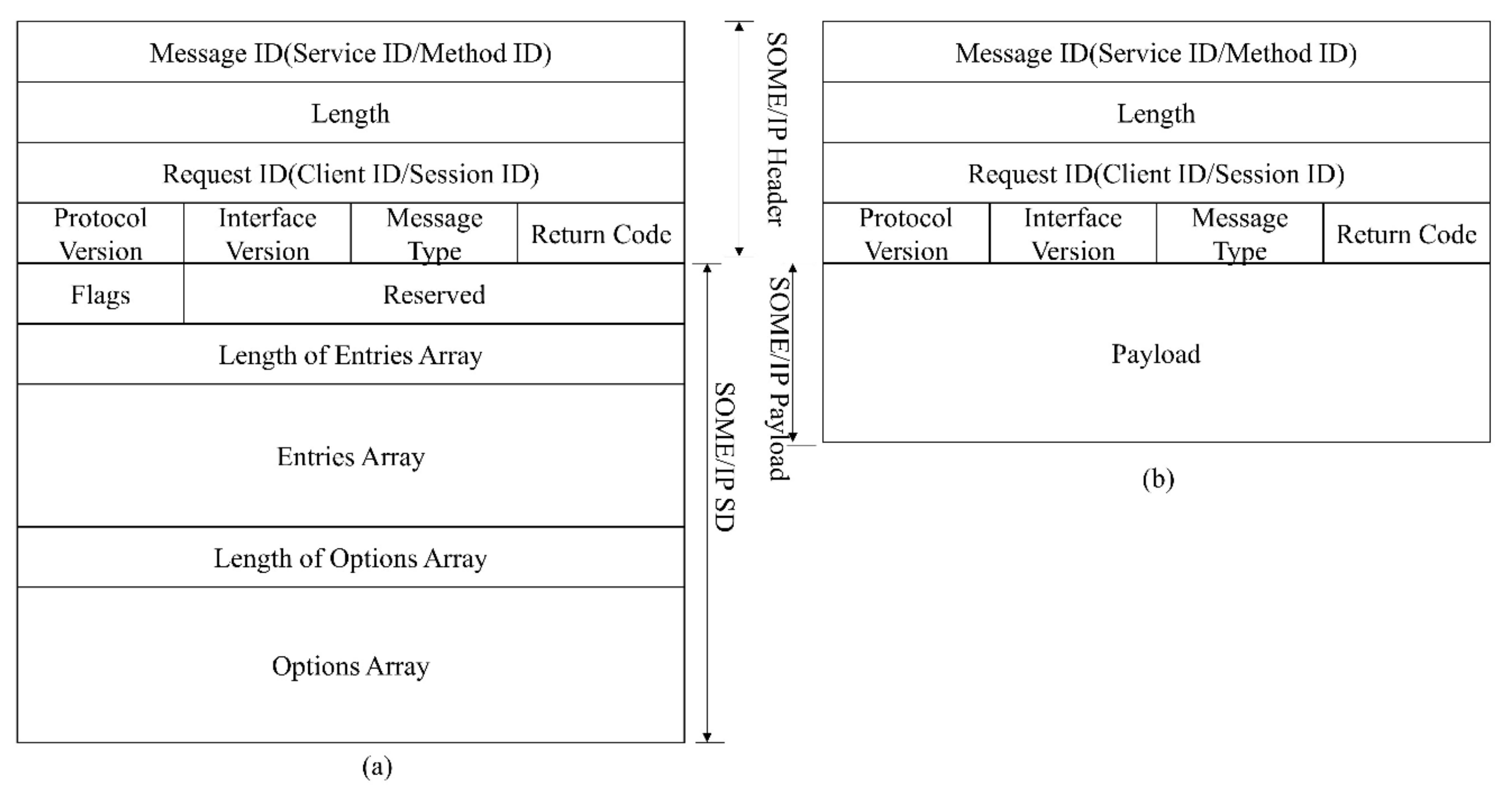
Figure 1. SOME/IP protocol format. (a) SOME/IP-SD message format. (b) SOME/IP message format.
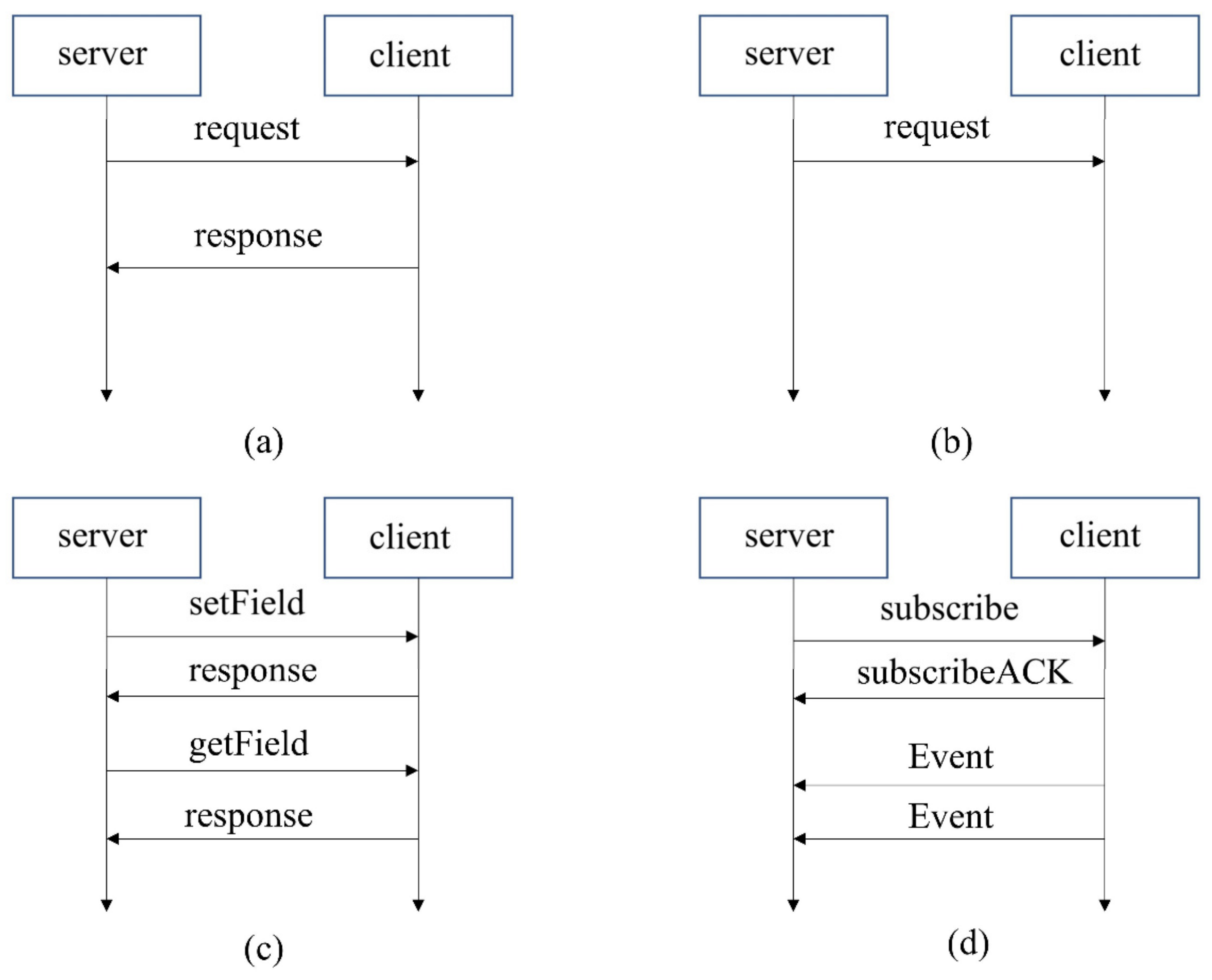
Figure 2.
SOME/IP communication paradigm. (
a
) Request-Response-RPC. (
b
) Fire & Forget-RPC. (
c
) Setter & Getter of Field. (
d
) Publish-Subscribe for event.
2.2. Attack Scenario
Figure 3 shows a zonal automotive electrical and electronic architecture (EEA). The automotive Ethernet is used as the backbone network to connect the zonal control unit (ZCU), central compute unit (CCU), rear seat entertainment (RSE), and telematics box (T-Box) in a star topology. SOME/IP runs as an upper-layer protocol in the backbone network. Four ZCUs are in charge of each of the four zones in the left, right, front, and rear of the vehicle. Each zone’s actuators, sensors, and sub-ECUs are connected to the ZCU via CAN or Ethernet. There are various external interfaces including Bluetooth, cellular network, GPS in RSE, CCU, and T-Box. Due to the need to perform diverse tasks such as information fusion, route planning, infotainment, etc., these electronic units are equipped with diverse operating systems such as Android, QNX, and Linux. An attack from the outside to the in-vehicle SOME/IP network is possible under the above EEA.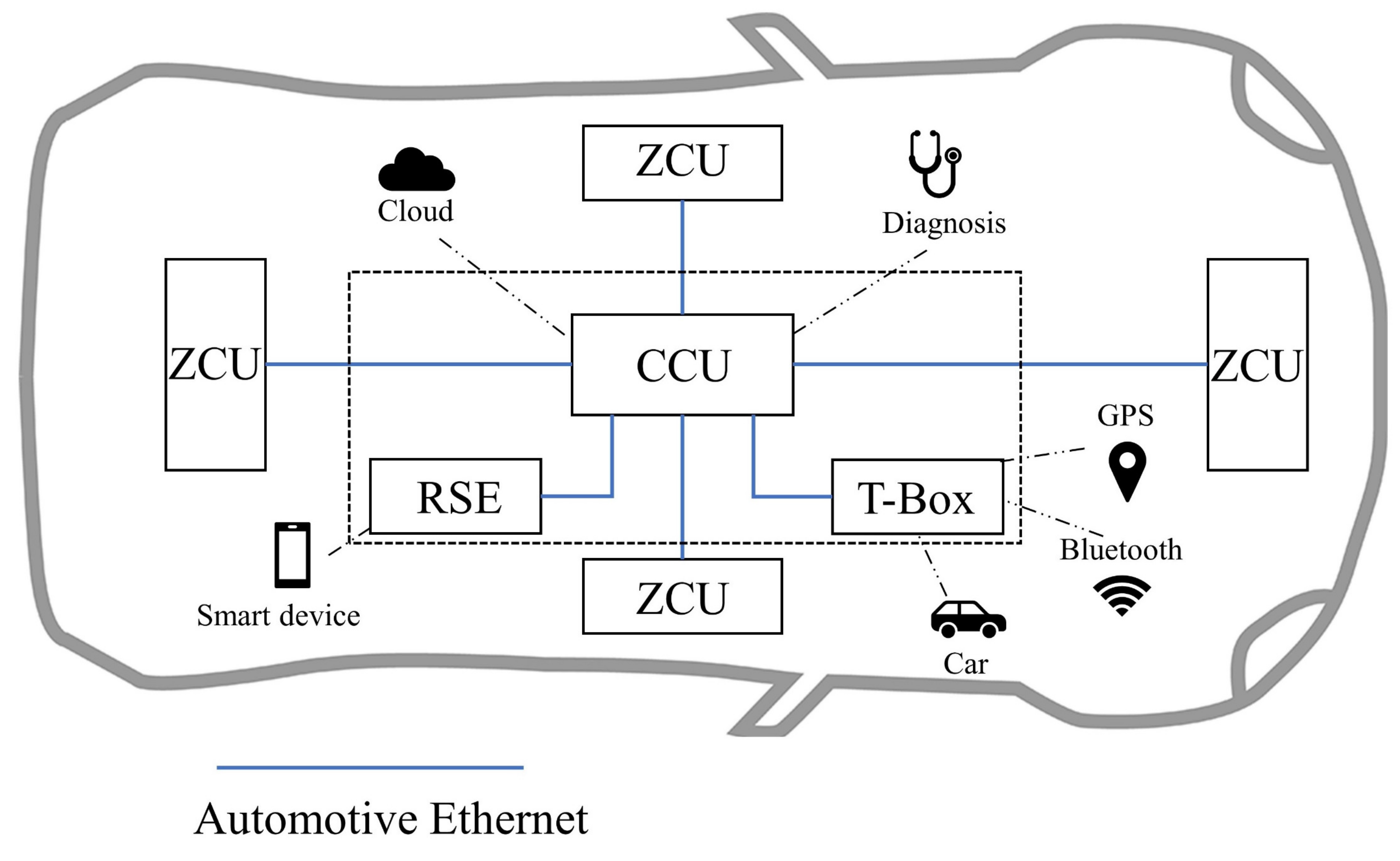
Figure 3. Automotive zonal EEA.
2.3. Attack of SOME/IP
2.3.1. Fuzzy
Targets of fuzzy include the header of the event and RPC, service entries array, and option array in the service discovery packet. Fuzzy can also be understood as random or traversal tampering.2.3.2. Spoof
Spoof is considered an upgrade of Fuzzy. In ourthe definition, the targets of Fuzzy do not contain the payload. The Fuzzy on the payload is invalid if the SOME/IP header does not match the requirements. Spoof means that the attacker can send the header of SOME/IP as required and tamper or replay the payload of the event at the same time. This requires a higher level of mastery of communication systems.2.3.3. DoS
DoS refers to the attacker congesting the network by modifying the cycle of periodic Events or SOME/IP-SD packets. DoS can also be achieved by injecting large amounts of traffic unrelated to SOME/IP. Nevertheless, this is not a SOME/IP level attack, and wresearchers can solve such DoS from the data link layer by introducing a flow meter or IEEE 802.1Qci [49][14].2.3.4. Abnormal Communication Process
The abnormal communication process mainly involves the four steps mentioned in the preseaperrch [44][15], including error on error, error on event, missing response, and missing request.2.3.5. Unauthorized Operation
Unauthorized operations do not exist in conventional CAN buses, which is mainly manifested in unauthorized subscription, unsubscription, provision of services, and unauthorized RPC calls. The services or RPCs here are defined in the system but have not been authorized by the upper application.3. Proposed Multi-Layer IDS
3.1. Dataset Generation
So far, there is no recognized SOME/IP dataset for intrusion detection in the industry. Since SOME/IP-based service-oriented communication has not been widely deployed in mass-produced vehicles, actual vehicle data communicating via SOME/IP cannot be collected. The literature [45][16] provides a SOME/IP data generator, but this generator can only generate the header of SOME/IP and fill in the payload with random numbers or fixed values. This makes it inconvenient to conduct a comprehensive intrusion detection study. The toolchain of Prescan, Simulink, and Vector CANoe is used to build the SOME/IP dataset to fill this gap. Prescan is a simulation platform for ADAS function development, which integrates modules involved in intelligent driving simulation, such as road scenes, smart cars, sensor models, vehicle dynamics configuration, and environmental perception. Simulink is a block diagram environment for modeling, analyzing, and simulating dynamic systems. CANoe is a bus development environment produced by VECTOR, which can be used for modeling, simulation, testing, and development of automotive buses. Simulating the ADAS function with Prescan and Simulink is one of the most common methods nowadays. Moreover, CANoe produced by Vector is widely used for in-vehicle network simulation and testing. Through this toolchain, traffic that meets the protocol requirements and has ADAS meaning can be generated. The data generation process is shown in Figure 4.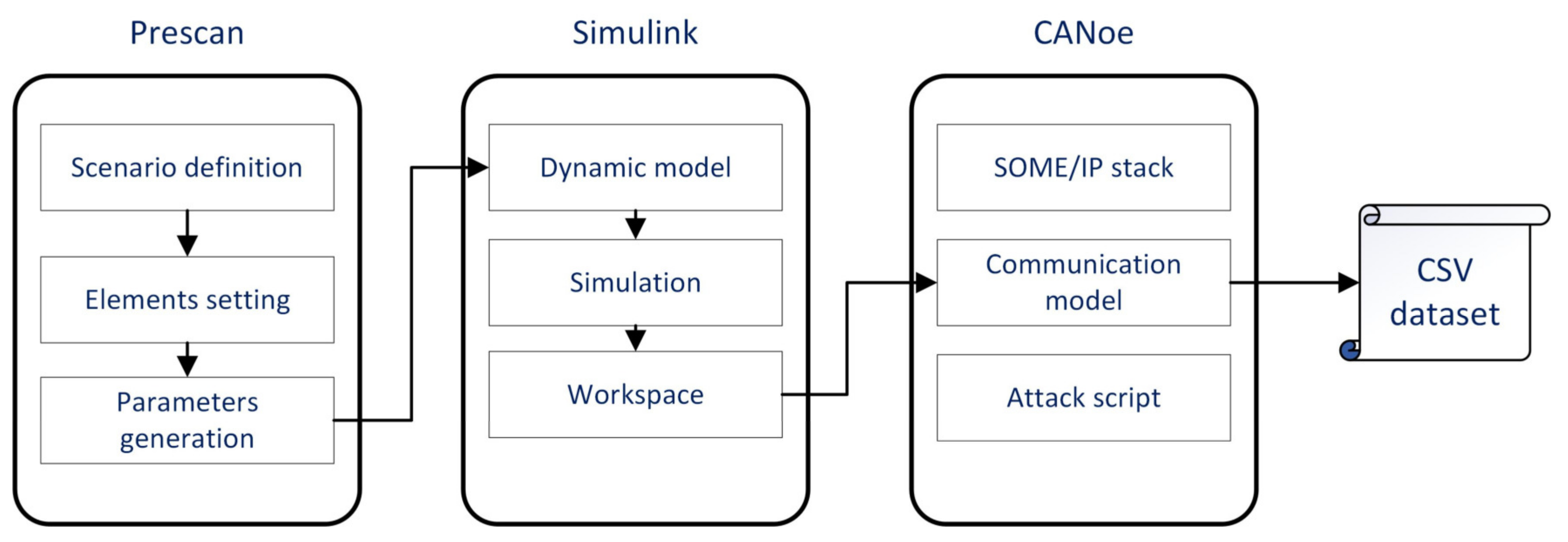
Figure 4. SOME/IP dataset generation process for IDS.
3.2. System Structure
The multi-layer IDS consists of rule-based detection and AI-based detection. The models in AI-based detection are trained before the IDS works appropriately. Figure 5 describes the system architecture of multi-layer IDS and reflects its workflow. In the training phase, the data are imported from the database into the data pre-processing module, which includes feature deserialization, normalization, and sequence generation. Sequence enters the initial multi-GRU model for training, and Bayesian optimization is used to obtain the hyperparameters of the model. During the detection phase, real-time SOME/IP packets flow from the IVN to the IDS. The packet enters the data extraction module, where the features for IDS are extracted. These features first enter the rule-based intrusion detection module. When all the rules are passed, the event packet will go through the pre-processing module to generate the feature sequence and enter the AI detection module. Other types of packets will jump out directly after entering the AI detection module and are marked as normal. When the results of both detection modules are normal, the packet is classified as normal. If any rules are not satisfied or the detection result of AI-based IDS is abnormal, the IPS will trigger related protection mechanisms, such as alerting, isolation, etc.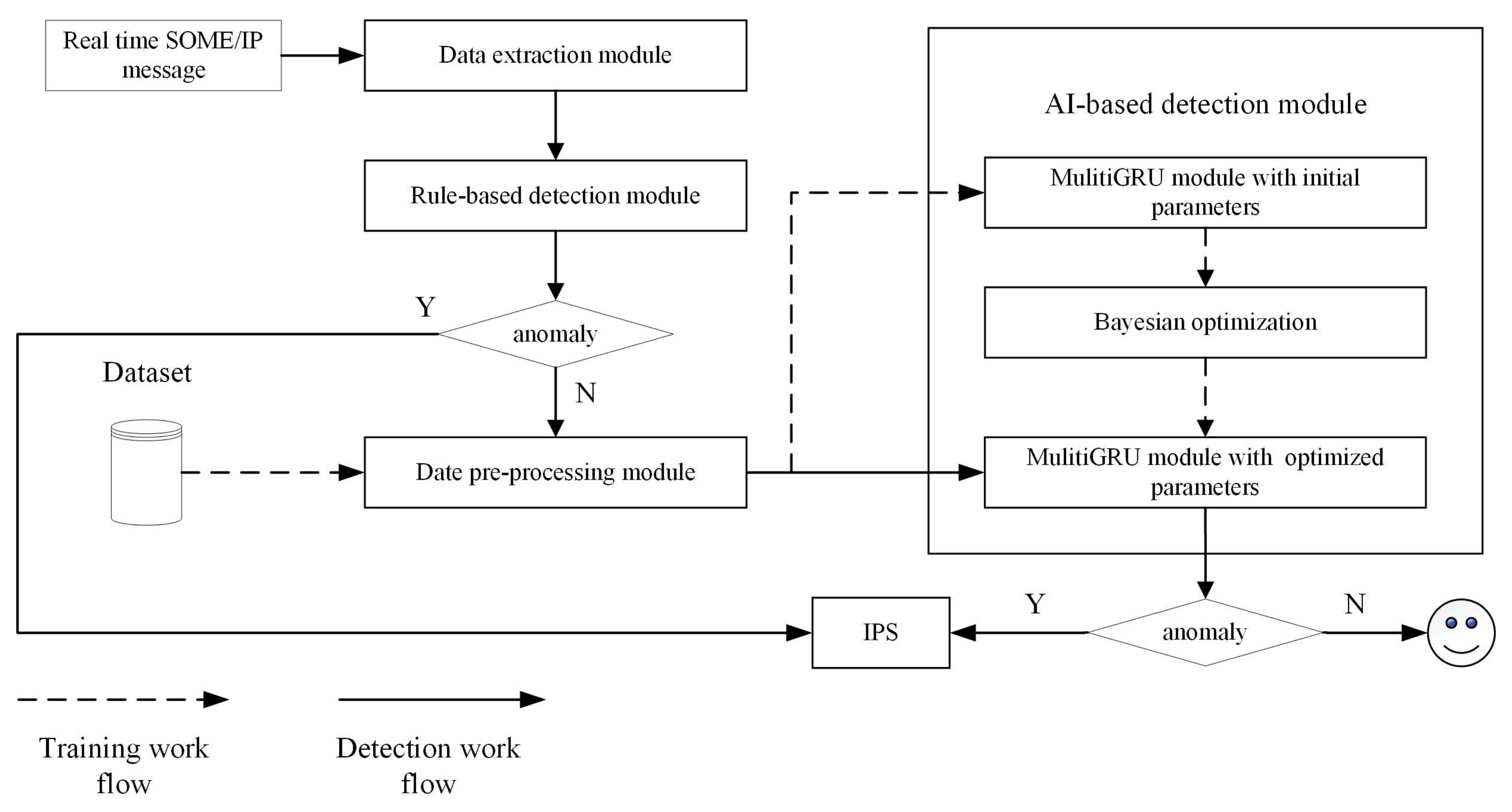
Figure 5. System architecture and workflow of multi-layer IDS.
Table 1. The detection range of multi-layer IDS.
| Attack Type | Detection Module | Content |
|---|---|---|
| Fuzzy | Rule-based | Header of event, RPC and SOME/IP-SD packet; service entries array and options array in SOME/IP-SD packet |
| Spoof | AI-based | Payload of SOME/IP event |
| DoS | Rule-based | Interval of event and SOME/IP-SD packet |
| Abnormal communication process | Rule-based | Communication process |
3.3. Data Extraction Module
Data extraction is a layer-by-layer unpacking process necessary for Ethernet communication. Each time the initial SOME/IP packet passes through a layer of the OSI model, the header of that layer will be added. After unpacking, the features for detection can be obtained.3.4. Rule-Based Detection Module
All SOME/IP packets are first subjected to rule-based detection, which can detect anomalies in the SOME/IP-SD packet, SOME/IP header of event and RPC, and communication process. Each message ID, consisting of service ID and method ID, as shown in Figure 1, corresponds to a rule group. The rule group includes static field rules, dynamic field rules, and communication state rules. These rules will be judged in turn. As soon as a rule is not satisfied, an anomaly is flagged and pops up immediately. The packet is also marked as an anomaly if there is no corresponding message ID in the module. Parameters in the whole rule-based detection module are listed in Table 2.Table 2. Fields used in rule-based detection module.
| Field Name | Description |
|---|---|
| IP Address | Static field in the header of SOME/IP and SOME/IP-SD packet |
| MAC address | |
| Port number | |
| Message ID | |
| Protocol version | |
| Interface version | |
| Message type | |
| Client ID | |
| Find service entries array | |
| Offer service entries array | |
| Eventgroup array | |
| Options array | |
| Session ID | Dynamic field |
| Interval of packet | |
| Status cache of the previous message | Communication status parameter |
| The estimated status of the next message |
References
- Keertikumar, M.; Shubham, M.; Banakar, R.M. Evolution of IoT in smart vehicles: An overview. In Proceedings of the International Conference on Green Computing and Internet of Things (ICGCIoT 2015), Greater Noida, India, 8–10 October 2015; pp. 804–805.
- Toufga, S.; Abdellatif, S.; Assouane, H.T.; Owezarski, P.; Villemur, T. Towards Dynamic Controller Placement in Software Defined Vehicular Networks. Sensors 2020, 20, 1701.
- Traub, M.; Maier, A.; Barbehon, K.L. Future Automotive Architecture and the Impact of IT Trends. IEEE Softw. 2017, 34, 27–32.
- Panigrahy, S.K.; Emany, H. A Survey and Tutorial on Network Optimization for Intelligent Transport System Using the Internet of Vehicles. Sensors 2023, 23, 555.
- Hank, P.; Müller, S.; Vermesan, O.; Van Den Keybus, J. Automotive ethernet: In-vehicle networking and smart mobility. In Proceedings of the 2013 Design, Automation & Test in Europe Conference & Exhibition (DATE 2013), Grenoble, France, 18–22 March 2013; pp. 1735–1739.
- Aspestrand, O.; Claeson, V. The Fast-Lane Development of Automotive Ethernet for Autonomous Drive. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2018. Available online: https://odr.chalmers.se/bitstream/20.500.12380/256211/1/256211.pdf (accessed on 20 April 2023).
- Kreissl, J. Absicherung der SOME/IP Kommunikation Bei Adaptive AUTOSAR. Master’s Thesis, Universität Stuttgart, Stuttgart, Germany, 2017. Available online: https://elib.uni-stuttgart.de/bitstream/11682/9482/1/ausarbeitung.pdf (accessed on 20 April 2023).
- Golson, J. Jeep Hackers at It Again, This Time Taking Control of Steering and Braking Systems. Available online: https://www.theverge.com/2016/8/2/12353186/car-hackjeep-cherokee-vulnerability-miller-valasek (accessed on 20 April 2023).
- Miller, C.; Valasek, C. A Survey of Remote Automotive Attack Surfaces. Available online: https://img.hardworkingtrucks.com/files/base/randallreilly/all/migrated-files/hwt/2014/09/Remote_Automotive_Attack_Surfaces.pdf (accessed on 20 April 2023).
- Woo, S.; Jo, H.J.; Lee, D.H. A Practical Wireless Attack on the Connected Car and Security Protocol for In-Vehicle CAN. IEEE Trans. Intell. Transp. Syst. 2014, 16, 993–1006.
- Mandal, A.K.; Cortesi, A.; Ferrara, P.; Panarotto, F.; Spoto, F. Vulnerability analysis of Android auto infotainment apps. In Proceedings of the 15th ACM International Conference on Computing Frontiers, Ischia, Italy, 8–10 May 2018; pp. 183–190.
- SOME/IP Service Discovery Protocol Specification, AUTOSAR. 2022. Available online: https://www.autosar.org/fileadmin/standards/R22-11/FO/AUTOSAR_PRS_SOMEIPServiceDiscoveryProtocol.pdf (accessed on 20 April 2023).
- SOME/IP Protocol Specification, AUTOSAR. 2022. Available online: https://www.autosar.org/fileadmin/standards/R22-11/FO/AUTOSAR_PRS_SOMEIPProtocol.pdf (accessed on 20 April 2023).
- Luo, F.; Wang, B.; Fang, Z.; Yang, Z.; Jiang, Y. Security Analysis of the TSN Backbone Architecture and Anomaly Detection System Design Based on IEEE 802.1Qci. Secur. Commun. Netw. 2021, 2021, 6902138.
- Alkhatib, N.; Ghauch, H.; Danger, J.-L. SOME/IP Intrusion Detection using Deep Learning-based Sequential Models in Automotive Ethernet Networks. In Proceedings of the 2021 IEEE 12th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON 2021), Vancouver, BC, Canada, 27–30 October 2021; pp. 0954–0962.
- SOME/IP Generator. Available online: https://github.com/Egomania/SOME-IP_Generator (accessed on 20 April 2023).
More