Your browser does not fully support modern features. Please upgrade for a smoother experience.
Please note this is a comparison between Version 1 by Eduardo Buglioni Fernandez and Version 2 by Rita Xu.
Sensors and actuators are fundamental units in Cyber–Physical and Internet of Things systems. Because they are included in a variety of systems, using many technologies, it is very useful to characterize their functions abstractly by describing them as Abstract Entity Patterns (AEPs), which are patterns that describe abstract conceptual entities.
- cyber–physical system
- Internet of things
- security pattern
- sensors
- actuators
1. Introduction
Sensors and actuators are fundamental units in Cyber–Physical systems (CPS) and Internet of Things (IoT) systems. As they can be included in a wide variety of systems using many technologies, it is very useful to characterize their functions abstractly. CPS and IoT systems are usually complex and very heterogeneous, which makes their design very difficult; to handle this difficulty, rwesearchers use abstraction in the form of software patterns. A pattern is a solution to a recurrent problem in a given context, can be used as a guideline for design, and captures the experience and knowledge of designers to develop models that can be used for new designs [1]. In particular, reswearchers use a special type of patterns, known as Abstract Entity Patterns (AEPs), which are a type of analysis pattern that represent abstract conceptual entities describing the fundamental attributes and behavior of an entity [2]; in this case, rwesearchers build conceptual models of sensors and actuators. AEPs are generalizations of Abstract Security Patterns (ASPs), a concept introduced in [3] and expanded in [4]. An Abstract Security Pattern describes a conceptual security mechanism that includes functions able to stop or mitigate a threat or comply with a regulation or institutional policy; ASPs are used as paradigms to derive concrete patterns, which inherit their basic features. ASPs are secure conceptual entities, while AEPs are conceptual entities. A Security Solution Frame (SSF) [5] groups together related security patterns; it is built starting from ASPs and adding concrete security patterns suited to specific technologies. A Sensor AEP and an Actuator AEP describe the structure and operations that every sensor and actuator must have. A structure combining related AEPs (see Figure 1 for two examples) is an Entity Solution Frame (ESF); that is, an SSF is a secure ESF.
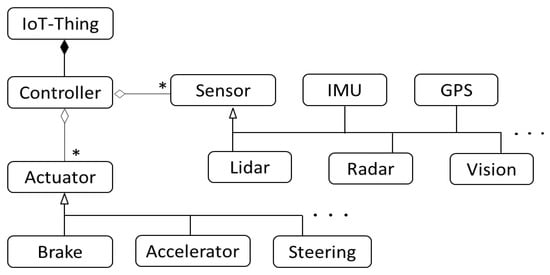
Figure 1. Pattern diagram of a combination of ESFs for sensors and actuators. Symbols are standard UML symbols; a triangle indicates inheritance; a black rhomboid is strong aggregation, where components depend on the composite; and a white rhomboid is loose aggregation, where components are independent of composite. An * indicates multiplicity.
For concreteness, reswearchers study sensors and actuators in the context of autonomous cars. An autonomous car is a complex system because, in addition to its own complex design, it interacts with other vehicles and with the surrounding infrastructure. To handle these functions, the car must incorporate various technologies from different sources. An autonomous car is an example of a Cyber–Physical system, which includes functions performed by Internet of Things devices. For example, IoT units allow an autonomous car to be connected wirelessly to roadside units, other vehicles, and fog and cloud systems; IoT units perform functions such as navigation and braking.
Autonomous cars would be impossible without various types of sensors because they enable them to sense internal and external environments needed for safety and performance. Autonomous car Reference Architectures (RAs) are typically structured into hierarchical layers [6], while sensors and actuators are located in a low layer of the RA. The sensors used in autonomous cars monitor their operation, measure physical variables, make them capable of driving themselves, and enhance them to become fully autonomous. Some of the sensors, such as Global Positioning Systems (GPS) receivers, radars, cameras, lidars, ultrasound, and laser scanners, allow them to have functionalities such as lane-keeping, detect objects, automatic braking, automatic parking, etc. For example, if the car is drifting from its lane, lane-keep assist will automatically steer back the vehicle into its lane.
Security is a fundamental objective for autonomous cars and most CPSs because their safe operation can be affected by security attacks. As they usually perform basic functions in autonomous cars, the security of sensors and actuators is very important. TheOur objective for future work is to build a Security Solution Frame for sensors and actuators for autonomous cars that will facilitate their secure design; instead of securing units piecewise, designers can use a unit with several functions that has been proven to be secure. This SSF requires several security patterns and can eventually be used for building a security reference architecture for autonomous cars.
Figure 1 presents a pattern diagram of the combination of two ESFs (a pattern diagram shows relationships between patterns [7][8]). The ESF based on the Sensor AEP shows Lidar, Radar, Vision, Inertial Measurement Unit (IMU), and GPS as derived patterns; that is, they are types of sensors. The ESF based on the Actuator ESP shows Brake, Accelerator, and Steering as derived patterns; that is, they are types of actuators. The asterisks indicate that a controller controls several sensors and several actuators, which can be of different types. Actuators receive commands from the controller and take actions on sub-systems, such as the brake, engine, steering, and transmission. IoT-Thing is an entity in an IoT system that controls the work of actuators and activates the reception of data from sensors. The dark rhomboids define strong inclusion while white rhomboids define loose inclusion [8][9].
This model includes the typical components used in autonomous cars; specific types of cars may use more or fewer devices than other models. Sensors and actuators play an important role in Adaptive Cruise Control (ACC) systems and other functions of various Advanced Driver Assistance Systems (ADAS); for example, the Automatic Emergency Braking (AEB) assists lane-keeping and some other functions. If obstacles are detected using sensor data, an Electronic Control Unit (ECU) avoids collisions by sending signals to actuators to reduce engine power, adjust steering, or apply brakes [9][10][10,11]. Similar structures can be found in crane control systems, water purification systems, and many other CPSs.

2. Abstract Entity Patterns for Sensors and Actuators
2.1. Abstract Entity Sensor [11][7]
2.1.1. Intent
A sensor measures physical values from its environment and converts them into data that can be interpreted by humans or machines. This pattern describes the architecture of sensors at an abstract level.2.1.2. Context
RWesearchers consider an environment where theywe use Cyber–Physical and IoT systems; for example, autonomous cars. In these systems, researcherswe need to measure and collect physical quantities to be used by a control system or a logging system.2.1.3. Problem
In IoT and CPSs, there is a need to measure a variety of physical quantities, e.g., temperature, distance, pressure, etc. These are analogous quantities and must be converted to digital data and sent to other places or stored. What kind of devices can perform these functions? The possible solution is constrained by the following forces:-
The measuring devices must collect physical values from their environment;
-
The collected values should be able to be converted to digital data;
-
The data collected must be sent accurately to a designated destination or stored;
-
The device must have a sufficient amount of resources, such as computational capacity, power supply (battery life), etc.;
-
There is a need to collect data from different types and numbers of devices. Complex systems need a variety of measurements;
-
Devices used for data collection should not be very expensive, decreasing the cost of the systems that use them.
2.1.4. Solution
A sensor is a device that can collect values from its surrounding environment and convert them into data. The data collected by the sensor is then used for various purposes in different systems.Structure
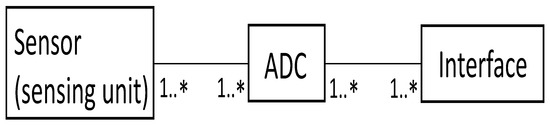
In the basic sensor, reswearchers only need the Sensor itself, a Power Supply, an Analog-To-Digital Converter (ADC), and Interfaces to the rest of the system. Figure 2 presents a class diagram of the sensor ACP. The Sensor (sensing unit) collects a signal representing some physical measure and sends it to an ADC, from where it can be captured through an Interface that communicates with other system components. This Interface can also be used to receive commands to activate/deactivate the sensing unit.Figure 2. UML class diagram of the Sensor ACP. Classes are related through associations indicating their multiplicities (many to many, at least one object). An * indicates multiplicity.
2.1.5. Known Uses
This pattern defines attributes and behavior that are inherited by all its derived patterns, including the sensor patterns mentioned in this article.2.1.6. Consequences
This pattern has the following advantages:-
Sensors can collect physical values from their environment;
-
Sensors have their own ADCs to convert information into digital data;
-
Sensors have Interfaces and data collected by sensors can be sent accurately to a designated destination;
-
Sensors have power supplies and may use them only when required. Sensor technologies have increased due to the inexpensive availability of computational resources;
-
Various systems/applications use different types and numbers of sensors and collect data; however, sensor fusion technology can combine sensory data from disparate sources.
-
Elaborated sensors are more expensive; their use must be justified by need;
-
Since sensors may collect any activities around them, their use can raise concerns over the privacy of individuals. This point depends on the type of sensor.
2.2. Abstract Entity Actuator
2.2.1. Intent
An actuator converts a command from a controller into an action in the physical environment. This pattern describes the architecture of actuators at an abstract level.2.2.2. Context
ResWearchers consider environments, such as vehicles, manufacturing systems, and similar, where Cyber–Physical and IoT systems perform control functions. In these systems, researcherswe need to apply force for activities such as braking, moving a piece, or changing the position of a device.2.2.3. Problem
Sensors used in IoTs and CPSs collect data and send it to a controller, which generates commands based on the data sent to it. The controller sends these commands to a system to perform actions such as braking, steering, or moving objects. What kind of systems can perform these actions? A possible solution is constrained by the following forces:-
Command faithfulness: Commands sent by controllers must be faithfully executed;
-
The controller receives data with instructions for physical actions;
-
Actuators include mechanisms to perform physical actions following commands;Resource availability: There must be enough resources, e.g., batteries, to perform the actions;
-
Functional availability: Systems must be available to act when needed;
- The controller generates digital commands;
-
The controller sends digital commands to the DAC;
-
Actuators can be provided with enough resources to perform their work, such as electrical power, fuel, or hydraulic/pneumatic energy;Action variety: There must be ways to perform different varieties of actions according to the needs of applications;
-
Power heterogeneity: Different types of actions (electric, hydraulic, pneumatic, etc.) require different sources of power, such as electric or hydraulic power.
2.2.4. Solution
Physical actions can be performed by actuators by taking commands generated by a controller and performing the physical operations indicated by those commands. The digital commands of the controller must be converted into analog commands appropriate to the type of actuator.Structure
In the basic actuator system, rwesearchers only need the actuator, a Digital-To-Analog Converter (DAC), and a Controller. The main function of the actuator is to execute the actions (instructions) sent by the Controller for operating on a physical medium. Figure 3 presents the class diagram of the Actuator AEP. The controller receives information from IoT Things or other sub-systems and generates instructions (in the form of digital signals). The resulting signals are sent to a DAC. The DAC converts a digital signal into an analog signal, which is sent to the Actuator, which performs the required command.Figure 3. Class diagram of Actuator ACP. Classes are related by associations indicating their multiplicities (many to many, at least one object). An * indicates multiplicity.
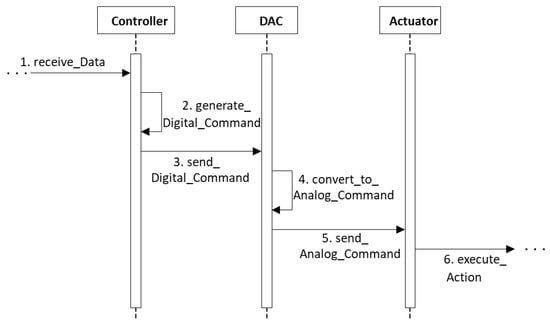
Dynamics
Figure 4 shows the sequence diagram of the use case “Execute a Command”. The scenario is:Figure 4. Sequence diagram of Use Case “Execute a Command”. The vertical axis is time, showing the sequence of arrival of messages to each object.
- The DAC converts these digital commands into analog commands;
- The DAC sends the analog commands to the actuator;
-
The actuator executes the requested physical action.
2.2.5. Known Uses
This pattern defines attributes and behavior that are inherited by all its derived patterns, including the actuator patterns mentioned in this article.2.2.6. Consequences
This pattern has the following advantages:- It is possible to build actuators appropriate for different types of applications.
- This pattern has the following disadvantage:
-
Inexpensive concrete actuators have limited resources and cannot perform elaborate commands; thus, they may not meet design constraints on mass and volume. Advanced actuators may also be costly.