Your browser does not fully support modern features. Please upgrade for a smoother experience.
Subjects:
Transportation
With the advent of numerous microfabrication techniques, the prospect for microscale robots has greatly increased over last decade. A fully autonomous fleet of microrobots can potentially revolutionize both in vitro and in vivo cell manipulation/sensing techniques for the biomedical field, assembly operations of heterogeneous microscale objects in the manufacturing field, and targeted drug delivery and biopsy operation in the medical field. Miniaturization of the robot footprint by taking advantage of modern fabrication techniques comes with the challenge of accommodating on-board power, sensing, communication, and control. Often, the robot’s footprint needs to be scaled up in order to accommodate all these accessories, which makes it unsuitable for most of the aforementioned applications.
The challenge is to have a robot small enough to be able to perform these tasks while still having on-board sensors and actuators. Our current research is driven by answering the question: can we out-source all the auxiliary components (e.g., power, sensor, communication and control) to an off-board system and still be able to operate a fully autonomous fleet of wireless mobile microrobots?
Over the years, many microrobot actuation methods have been proposed and studied by researchers. Some of them include: electrostatic [1,2], electro-active using ionic polymer-metal composites [3,4,5,6,7], magnetic [8,9,10,11], electrical-magnetic hybrid [12], opto–thermal [13,14,15], optical [16,17,18], microfluidics [19], bacteria driven [20,21,22,23,24], and chemical [25,26,27] techniques. Of them, magnetic, optical, and microfluidics are non-contact in nature making them suitable for off-board operations. Magnetic actuation has garnered lots of attention in the last decade because of the large range of forces it can provide [28], the ease in ability to make customizable systems [29], cost effectiveness, and its ability to be integrated with many medical instruments, such as magnetic resonance imaging (MRI) machines [30] and ultrasound. One of the greatest limitations to magnetic actuation is the working distance, which reduces the magnetic field strength as a function of distance squared. To overcome this problem, the microrobots can be designed with a higher magnetization, which will make them more responsive to lower magnetic fields. Otherwise, larger currents can be used in the coil systems but this solution has heat and power consumption limitations. Using these solutions in conjunction with a control algorithm that modulates the magnetic field strength based on the location of the microrobots in the workspace will result in smoother actuation.
Typically, robots need to be equipped with sensors/end effectors in order to realize their full potential [31], enhancing their capabilities and functions beyond just locomotion. Our microrobots are fabricated with functional components that are suitable for a particular task, e.g., end-effectors for manipulation, elastic components to indirectly sense force, etc. A fully autonomous functional microrobot must sense the world for feedback. Finely controlled microrobots are applicable to multiple biological applications, such as single-cell manipulation [32,33] and the arrangement of cells in particular configurations in scaffolds for tissue engineering applications [34]. The ability to sense micro-forces accurately and in real-time is desired for the expansion of possible applications of mobile microrobots to areas like intelligent biomanipulation, mechanobiology, and even for advanced theranostics [35]. The most popular means of collecting information from an on-board sensing element is through passive sensing (e.g., with MRI or optical imaging). Optical imaging with an overhead camera is suitable for in vitro applications as well as microassembly operations. However, for in vivo operation, MRI or ultrasound imaging are typically the only available options. The challenge here is to make the functional components within the limited footprint of the robot that are sensitive enough to be operated with passive sensing elements that can be observed by an imaging system.
Generaly, micro-force sensing has been performed based on microelectromechanical systems (MEMS), such as piezoresistive sensors [36,37,38,39], strain gauges [40,41], and capacitive sensors [42,43,44]. These devices are usually extremely delicate and are used in very specific applications. Furthermore, they can be expensive and difficult to integrate into typical experimental test-beds. Similarly, an atomic force microscope (AFM) has been used for micro/nano force sensing [45]. However it suffers from similar problems due to its bulkiness and high cost. Thus, one of our goals is to develop wirelessly controlled microrobots with micro-force sensing capabilities that are versatile, relatively inexpensive, and have a wide range of applications.
Using magnetic actuation, microrobots can be wirelessly and accurately controlled in the workspace. However, the global nature of magnetic actuation is a discouraging factor in designing a fully autonomous fleet of magnetic microrobots that can be controlled individually. Therefore, a major research question is: how can one independently actuate multiple magnetic microrobots?
Our microrobots are designed to be operated in an environment with multiple dynamic obstacles. In a multi-robot operation, each robot is treated as an obstacle with respect to the other and they communicate and synchronize their movements through a centralized system. The planning and control for multiple microrobots becomes challenging since it has to take into account randomly moving obstacles as well as synchronize each individual robot’s path with one another. Furthermore, the planner must be robust to any uncertainty that may arise from sensing and actuation of the system.
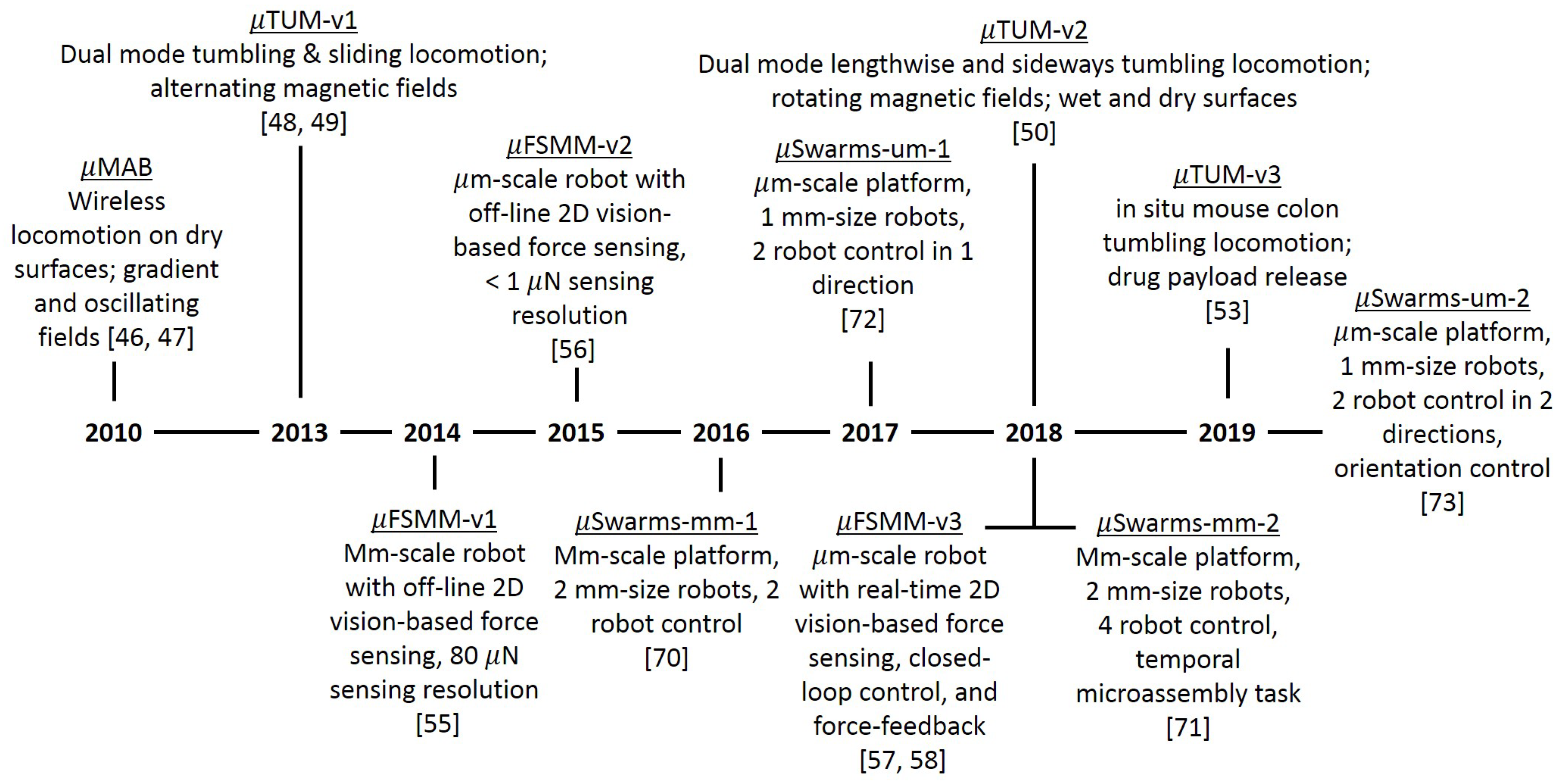
Figure 1. Summary of the progress creating functional mobile microrobotic systems.
Magnetostrictive Asymmetric Thin Film Bimorph Microrobot (μMAB)
Our microrobot exploration started by addressing the mobility challenges present at the microscale. Aiming at the 2010 Mobile Microrobot Challenge, the first microrobot design was a micro-scale magnetostrictive asymmetric thin film bimorph (μMAB) microrobot [46,47] (Figure 2). Similar to the piezoelectric effect, a magnetostrictive material generates strain in the presence of an external magnetic field. The μMAB design binds a magnetic layer on top of a non-magnetic layer. This bimorph structure will then bend due to the magnetostrictive strain. This way, pulsing a magnetic field on and off will alternately bend and straighten the microrobot body. The deflection of the layered structure was simulated using a piezoelectric finite elements model (FEM) model, translated from magnetostrictive parameters. When the design geometry is asymmetric at both ends, the blocking force due to bending will also be uneven. Therefore, the resulting differential of blocking force from the rear and front ends will translate the microrobot body across the substrate in a step-wise fashion.