Smart cities aim to integrate technological development with different functions/components such as mobility, management of energy, natural resources, water, and the waste cycle, air quality, land use, service network, construction, but also the economy, social participation, increased employment, and citizen safety. It includes a series of coordinated and integrated social, environmental and economic interventions to enhance human capital, reduce environmental impacts and solve ecological emergencies. The holistic approach is particular to smart cities, including several mobility aspects in the main European classifications. In particular, the development of smart cities depends on several factors related to transport supply (i.e., mobility service, infrastructure details, ICT) and demand (socio-demographic aspects), and the size of the city.
1. Introduction
The smart city concept was born in the early 1990s
[1]. American IT companies invented the term to describe new ICT tools aimed at responding to the problems of large metropolises, i.e., solving problems related not only to traffic and transport management but also to waste disposal, the efficiency of energy and water distribution networks, and the safety and health of citizens
[2].
The smart city is often associated with the concept of an eco-city or sustainable city aiming to improve the quality of urban services or reduce their costs. The main feature is smart management, lifestyle, mobility, housing, and a smart economy. The main objective of smart cities is to reconcile technological innovation with the economic, social, and ecological challenges of tomorrow’s cities. It must provide for a general improvement in the quality of life while respecting the environment.
Smart cities promote a sustainable and liveable urban future by making smart mobility an integral part of the smart city agenda. In terms of mobility, both the evolution of shared mobility
[3], gendered or demand-responsive mobility
[4][5], as well as the evolution of electric mobility and related infrastructure
[6], are strategies for optimising travel with a view to greater sustainability, especially if they are linked to the development of mobility as a service (MaaS) digital platforms for exemplifying mobility choices for users
[7].
From the point of view of infrastructures and structures, the spread of design using tools such as the Infrastructures building information model (I-BIM) allows control over the various life stages of the project. Additionally, it enables information to be associated with safety
[8] or the quality of the materials used or building evaluations
[9].
The deployment of sensors in the urban environment enables the acquisition of all dynamic urban processes and the possible online transmission of data, processing by algorithms that also allow for automated management decision-making. Technological energy solutions and the spread of different modes of transport exemplify more liveable urban areas
[10]. Therefore, automated control over dynamic urban processes is a universal principle that works for all areas of urban life, including transport and mobility
[11].
2. Background on Smart Cities Benefit
Technology implemented in smart cities can help cities operate more efficiently, improving services to citizens and businesses. While the definition of a smart city is still evolving, some things have become clear: smart cities harness information and communication technologies to improve service levels, citizen well-being, sustainability, and economic development. The increasing development of technology can make cities more innovative and more efficient, given the rapid growth of the urban population in the coming decades. Therefore, the benefits associated with the development of smart cities are briefly described in the following sub-sections.
2.1. Cities with More Effective Decision-Making Based on Big Data
Significant technological innovation development has affected several communities in the last decade, facilitating and speeding up data and information exchange. Then, such a context implemented in cities led to the concept of the smart city. There are several definitions of a smart city; generally, it is a context where ICT (Information and Communication Technologies) can integrate traditional infrastructures through digital devices. Therefore, this definition highlights how smart cities represent routine function automation for citizens’ issues and a planning tool to monitor cities’ infrastructures
[12]. The smart city concept began to spread since cities have been subjected to intense urbanisation. This situation led to the need for tools and methods to efficiently monitor and communicate systems to improve mobility and civil infrastructures or energy healthcare management.
Advances in big data and connected devices have given cities access to previously unavailable information. It gives them the ability to access and analyse a massive amount of information—and easily derive meaningful and actionable insights, especially in high-risk conditions. Notably, Big data and the Internet of Things (IoT) offer endless possibilities to enable stronger decision-making, which improves the lives of residents by cutting costs and improving services
[13].
2.2. Greater Citizen and Government Engagement
Collaboration tools, modern and intuitive websites, mobile applications, self-service portals, and convenient online accounts have become the standard in many aspects of life, and citizens expect no less from their city. The expansion of digital services in communities makes smart cities more attractive for residents and promotes a connected city experience. Together with a bottom-up planning approach, these intelligent technologies help increase civic engagement and trust in municipal officials
[14].
2.3. Safer Communities
A smart city is safer because it can take advantage of technological advances, and pursuing public–private partnerships helps reduce criminal activity. The use of sensors and 24-h cameras can prevail a sense of safety among the citizens
[15]. Moreover, intelligent buildings could also provide complete health and safety monitoring for the users or inhabitants
[16]. For instance, automatic alarm systems with cameras and smart locks ensure home security, and remote control systems give users more control over their living conditions.
2.4. Reduced Environmental Footprint
With rising greenhouse gases, debris in our oceans, and rubbish on our streets, smart cities are fighting to reduce the adverse effects on the environment. Energy-efficient buildings, air quality sensors, and renewable energy sources give cities new tools to reduce their ecological footprint. Deploying air quality sensors around a city, for example, can provide data to track peak moments of low air quality, identify the causes of pollution and provide analytical data that officials need to develop action and mitigation plans, especially in the medical field.
2.5. Improving Transport
Connected transport systems have great potential to improve efficiency throughout the city dramatically. From better traffic management to the ability of public transport passengers to track bus or train locations, smart technologies enable cities to better serve their citizens despite often rapidly growing populations. Technologies such as intelligent traffic signals optimise traffic flow, easing congestion during peak hours. Other intelligent transport technologies, such as smart parking management, allow cities to capitalise on additional revenue streams. The use of applications and sensors can also help during critical phases such as pandemics to manage the transport sector and the services offered to users
[17].
2.6. Greater Digital Equity
Smart city technology can create a more equitable environment for citizens if high-speed, low-cost services such as public WiFi hotspots strategically placed in a city are deployed
[18].
2.7. New Opportunities for Economic Development
By providing an open data platform with access to city information, businesses can make informed decisions through data analysis from integrated smart city technologies
[19].
2.8. Efficient Public Services
Smart sensors now allow cities to quickly identify leaks in pipes and repair damaged segments in a short time, reducing the amount of water lost. Smart electricity grids also enable two-way communication between electricity suppliers and consumers to help better identify peak usage times and outages
[20][21].
2.9. Improving Infrastructure
When correlated with advanced design and BIM (Building Information Modeling), smart technology can provide cities with predictive analysis to identify areas needing repair before infrastructure failure occurs (roads, bridges, buildings). It gives a massive opportunity for cities to save money on preventable infrastructure failures and better manage funds from the taxation of citizens
[8].
2.10. Increased Workforce Engagement
A highly effective workforce is an essential criterion for achieving an efficient smart city. Implementing smart technologies helps ease the burden of manual tasks that many city employees face every day
[22].
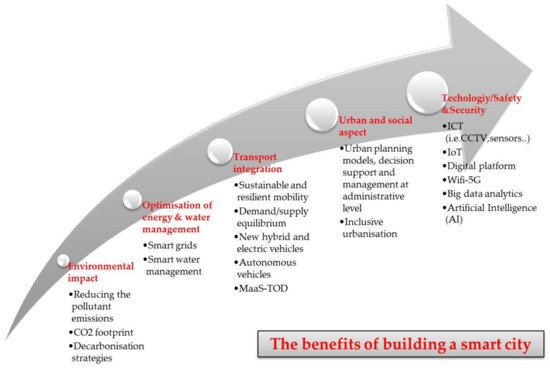
2.11. Transport Integration
The exemplification of the modal choice of transport is implemented through the dissemination of digital platforms such as Mobility as a Service (MaaS)
[23] and Transport on Demand (TOD)
[24] that allow the user to visualise the possible routes and the different modes of transport available and also to select the best modal choice considering sustainable and cost-effective solutions. These platforms allow several partners to exchange and share data to make decisions on mobility services, considering the recent spread of e-mobility
[25]. The
Figure 1 below, therefore, summarises the benefits of technology deployment and smart cities.
Figure 1. The benefits of the spread of smart cities.
3. The Development of CAVs in Urban Mobility
Connected and Autonomous Vehicles (CAVs) are vehicles equipped with various sensors to obtain information from the surrounding environment, which is then treated and processed by a computer incorporated into the vehicle, capable of making the vehicle move autonomously
[26]. Autonomous driving is considered one of the significant innovations of these first decades of the 21st century, capable of revolutionising the urban and extra-urban mobility system and transforming the lifestyle of people who move daily. In the last decade, the technology related to autonomous driving has accelerated thanks to Artificial Intelligence (AI) onboard vehicles. Thanks to the introduction of AI in driving systems, vehicles are becoming more and more “intelligent”, able to park themselves, change the speed or direction of travel, and react and predict obstacles while driving
[27].
With the introduction of CAVs, more excellent road safety is expected for drivers and weak road users with greater accessibility and less environmental impact. However, many challenges still need to be overcome to reach this scenario, which is not without risks. Above all, the possibility of not decreasing road congestion instead of encouraging it. For self-driving cars to safely handle any traffic condition and any impulsive behaviour of other road users, such as cars, pedestrians, and cyclists, and thus ward off human intervention, millions and millions of test kilometres are needed in extreme situations, such as heavy rain, snowfall, other weather events
[28].
In a future in which CAVs will be widespread, there will always be a coexistence of private and shared use regarding the transport of people. The former will correspond to the private car without substantial differences from current vehicles, apart from the technological equipment present in the automation. On the other hand, will be vehicles intended for community use, in which users will find themselves on board, as is currently the case on collective transport vehicles, with the possibility of using the time in the way they prefer, not having to pay attention to driving and with the obvious advantage of not having to bear the costs of owning a vehicle for private use. In short, the difference between vehicles for personal use and shared use will be in the way of use compared to the usable technology present onboard the vehicles. This circumstance is an essential factor if the time onboard is used up for work activities. In this regard, it is estimated that with autonomous driving, the value of time (VOT) can be reduced by 30%, compared to manual driving, reaching the level of collective transport
[29].
However, it is necessary to take into account an ambiguity deriving from a lack of traffic reduction, since if people used the time in the car to work or carry out activities in the same way as they would do at home or in the workplace, the time spent would become irrelevant. Queuing from the vehicle and therefore the problem of road congestion would take a back seat. Nevertheless, this problem is currently secondary, as it will take many more years to see the large-scale spread of CAVs.
3.1. CAVs Development and Distribution Forecasts
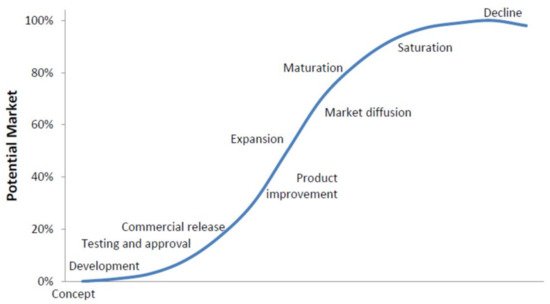
Many of the technologies applied in CAVs are currently under development and will have to go through several steps to become reliable, affordable, and, therefore, commercially available in most markets. Hence, like all new technologies, even those related to CAVs, it can be assumed that it should generally follow an S-shaped development curve, according to Rogers’ law
[30], as shown in
Figure 2 below.
Figure 2. Predictable distribution pattern of innovations often called S-curve according to Rogers’ law
[30].
From an initial concept, it is evident that there are numerous evolutionary steps, such as the initial stages of development and testing, approval, commercial release, product improvement, expansion and diffusion in the market, maturation and possibly saturation, and finally, the decline. Once level five of autonomous driving technology is fully functional and reliable, additional time will be required for testing and regulatory approval. As automatic vehicles can impose high external costs, including accident risks and delays for other road users, they will have higher testing and regulatory standards than most other technological innovations. Additionally, for this reason, it will take many years longer than other technological innovations to reach such a level of maturity to be spread throughout the territory.
Under favourable conditions, testing and approval will only take a few years, but the technology could prove unreliable and dangerous. Different jurisdictions are likely to require additional testing, permissions, and regulations, resulting in uneven implementation and deployment rates. It is essential to recognise how the management of a vehicle on public roads is complex due to the frequency of interactions with other objects, often unpredictable, such as vehicles, pedestrians, cyclists, animals, to name a few
[31]. Due to these continuous and unexpected interactions, CAVs will require even more complex software than those on board aircraft, which must “only” follow a route without worrying about constantly monitoring the surrounding area and avoiding sudden obstacles.
The data in
Table 1 estimate the percentage of diffusion concerning automatic vehicles on total sales, on the car fleet in circulation, and trips made by users
[30]. It is estimated that market penetration will occur from 2030, when vehicles with level 5 autonomous driving could be available for purchase but with obvious high costs and performance limits. Due to these constraints, only a minority of new vehicles will be fully autonomous over the first decade under consideration. Market shares increase due to the resulting drop in prices, improved performance, and increased consumer confidence. It is expected that, in about 2050, half of the vehicles sold and 40% of journeys could be made using autonomous driving. Market saturation is likely to take several decades, and some motorists may continue to choose “traditional” vehicles due to lower purchase costs and personal preferences.
Table 1. Timing estimation concerning the introduction and diffusion of CAVs in the car market.
| Diffusion Stages of C.A.V.s |
Decade of Diffusion |
% on New Sales |
% on the Car Fleet in Circulation |
% of Trips Made |
| Available with a very high price |
2030 |
2–5% |
1–2% |
1–4% |
| Available with a moderate price |
2040 |
20–40% |
10–20% |
10–30% |
| Available at an affordable price to many |
2050 |
40–60% |
20–40% |
30–50% |
| Autonomous driving as a standard feature included in most new vehicles |
2060 |
80–100% |
40–60% |
50–80% |
| Market saturation and full availability for everyone |
2070 |
? |
? |
? |
| Autonomous driving function for all new and operating vehicles |
? |
100% |
100% |
100% |
Table 1 represents only future estimations based on the current evolution of technologies and tests carried out on the road. Therefore, the implementation of self-driving vehicles may be slower and less complete than the more optimistic forecasts. The innumerable technical, political, and social challenges could prevent autonomous vehicles from being fully reliable and cost-effective from around 2030, extending the time to diffusion beyond 2040 or 2050. Their costs could be higher and the benefits smaller than expected. It will also be required consumer acceptance, which could be influenced by doubts, privacy concerns, or a preference for traditional driving. A significant portion of vehicle travel will remain human-driven even aftermarket saturation. Therefore, there could be slowdowns or accelerations in the diffusion of CAVs in the next few years, and probably this diffusion will not be the same in all countries and continents
[32].
However, considering private cars, other vehicles are intended to be automated, such as, for instance, fleets of automatic minibuses for integration with the local public transport service
[33]. Emerging shared mobility services, such as car-sharing and ride-hailing, also reduce vehicle ownership and parking demand in some situations. In this regard, the autonomous vehicle could accelerate these trends, even outside the dense urban areas, increasing accessibility and dependence on the private car
[34].
3.2. Potential Distribution Scenarios and Corresponding Urban Impacts of CAVs
The connection between land use and the transport system is indisputable. For this reason, since the mid-1900s, leading to an ever-greater growth and expansion of cities, public and private transport has become a fundamental part of human life, affecting all its features such as work, free time, and education and services. Cities are also expanding given the combined effect of increasing the well-being of the people, a change in lifestyles, and reduced transport costs. These peculiarities allow, for instance, to live further away from the workplace
[35]. Therefore, the introduction of CAVs in urban environments must be planned from a global perspective. By 2040, fully autonomous transport systems will appear in the largest cities in the world
[36].
Consequently, cities will have to face this challenge. The introduction of the CAVs will lead to a change in movement modalities and the planning and management of urban spaces. In this global approach, densities, urban structures, and land use need to be considered so that new mobility models resulting from vehicle automation provide the desired accessibility while promoting sustainable land use. Self-driving car technology will change the urban environment, and these changes will be irreversible. Hence, it is vital to know the consequences of its application, avoid adverse developments, and get the maximum benefit from the introduction of CAVs.
Like all innovative technologies, automated vehicles also have advantages and disadvantages deriving from their use and diffusion
[37]. The main benefits include increased accessibility for all population groups (from young people to the elderly to the disabled), entrance to areas of cities currently not served by public transport, and increased travel safety for all road users
[38]. The widespread introduction of CAVs is expected to reduce travel time, thanks to a uniform travel speed of all road users with a faster passage of intersections (thanks to the coordination between vehicles with V2X technologies) and an automatic selection of optimal paths using cloud technologies
[39]. Furthermore, the introduction of self-driving technology combined with electric cars will significantly reduce the toxic emissions into the atmosphere of cities
[40]. The CAVs could lessen the demand for parking in cities because the vehicle fleet will decrease, and parking spaces could be moved to more peripheral areas. Since the human presence in the parking areas will be negligible and not considered, their configuration could also change to optimise the available space
[41].
Regarding the disadvantages, first of all, there is the possibility, given by the widespread distribution of self-driving cars and access to them by a broader segment of the population, to strengthen the current trend towards expanding cities. If autonomous vehicles turn out to be mainly privately owned, the resulting increase in road traffic will negate the time savings described above in the positive features. A further negative impact is that on human health due to a sedentary lifestyle. The travel priority will be driving a car rather than walking or using a bicycle for short trips
[42].
3.2.1. Conceivable Spread Scenarios
Leaving aside the obstacles that could slow down the diffusion of CAVs, both economically (given a high initial purchase cost, at least in the first years of diffusion) and socially, there are currently several scenarios concerning the apparent safety and regulatory issues introduction of automated transport. Depending on ownership, there are two main ones: private ownership of the vehicle and public ownership of fleets of cars and autonomous vehicles
[36].
No significant changes are expected in the first scenario, where the cars will still be privately owned. In fact, in a private house, where a parking space is usually located adjacent to the house, a standard car is replaced by a car that drives itself. In areas with greater population density, it can be supposed that during the construction of a multi-story condominium, rather than the integrated underground parking, large independent garages located in more external and accessible places will be built because it will be possible to call the car directly from home through an application installed on the smartphone
[43].
However, a new type of mobility appears in the second scenario, linked to an autonomous robotaxi and minibus system and local public transport. Autonomous taxis can be considered the logical continuation of the car-sharing system, which already exists in cities
[44]. These taxis do not operate on certain times or routes but are concentrated on demand to be more widespread and efficient than a typical public transport line. The public transport system, integrating with the possibility of combined use with robotaxis or automated minibuses, will solve the problem of covering the last mile. Public transport will move passengers, over long distances, to a hub, where a robotaxi or minibus will pick up and deliver the passengers to their destination. All this could lead to a radical transformation of the public transport system.
The impact on the urban environment following the spread and use of CAVs will be significant
[31]. It will be necessary to completely rethink public areas and those destined to parking lots, as there will be less and less need in central or residential areas. The parking lots adjacent to the houses can be converted into additional private spaces or other pedestrian paths or cycle paths. For instance, the elimination of the private garage may favour the expansion of the airspace of the house, where granted, thus leading to better exploitation of the building lot. A similar situation to that expected with private buildings could occur with public ones. The car park will still exist but will be redesigned as a charging station for vehicles. It could be placed in an area adjacent to the building without going too far, thus avoiding increasing the kilometres travelled by cars to return from the destination to the car park and then return to pick up the passenger to bring it home.
Common to both scenarios is the impact on the urbanisation of the territory and road infrastructures. It is possible that with the coming of the CAVs, interest in suburban residential areas will increase. Autonomous vehicles will give greater access to outdoor areas, with lower market prices for housing, but being far from the centre, leading to an increase in urban sprawl. In addition, well-connected rural areas will gain accessibility in an automated driving environment
[35]. The positive effects of automation on the territory are subject to more sustainable mobility models. Above all, private owners and companies should aim to share vehicles to obtain higher vehicle utilisation.
3.2.2. Impacts on the Territory
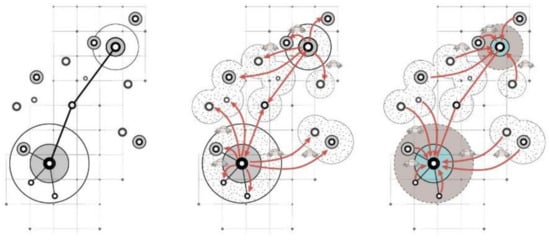
It is possible to highlight three main categories of CAVs’ influence on the urban form: urbanisation, road infrastructure, and impact at the local level
[36]. The first group includes the factors that influence the structure of the city. As depicted in
Figure 3, the introduction of autonomous vehicles can lead to urban sprawl and lower building density. Nevertheless, on the other hand, it can increase the accessibility of some previously inaccessible areas (red arrows in
Figure 3).
Figure 3. CAVs’ effect on building density
[36].
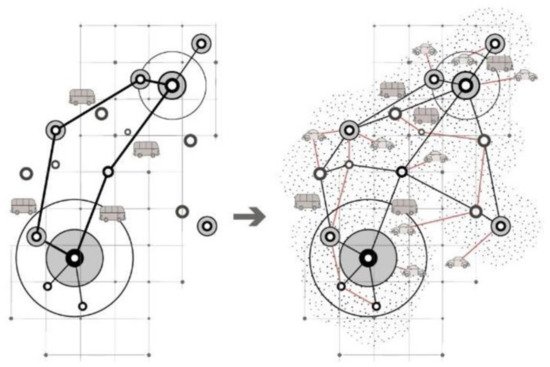
The public transport system can also notice improvements, notably in suburban areas. As previously mentioned, the introduction of autonomous transport systems can solve the last mile issue, thanks to a widespread diffusion proportionate to the demand for the various autonomous transport services (Figure 4).
Figure 4. CAVs’ effect on the urban transport system
[36].
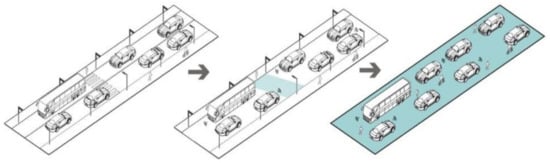
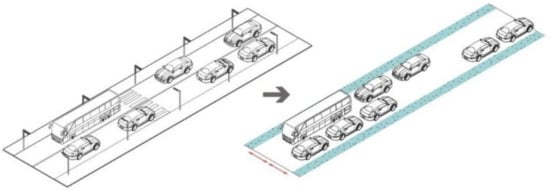
The second group (impact on road infrastructures) includes the factors that influence road space use and physical change. The introduction of CAVs will improve road safety, eliminating the current disagreement between the vehicle driver and pedestrians, and other road users (Figure 5). In a scenario in which there will be a progressive complete replacement of conventional vehicles with autonomous ones, not only the space intended for pedestrians will tend to expand, but the physical separation between cars and pedestrians could be eliminated on urban roads. Furthermore, the introduction of CAVs will reduce the lanes’ width and essentially eliminate the parking areas along the sidewalk (Figure 6).
Figure 5. Supposed transformation regarding the road section after the diffusion of the CAVs
[36].
Figure 6. Supposed more efficient utilisation of the carriageway given by the development of CAVs
[36].
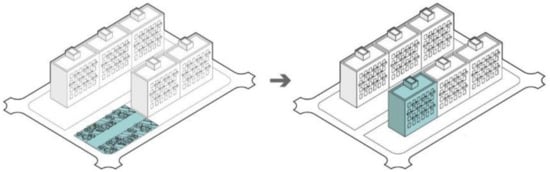
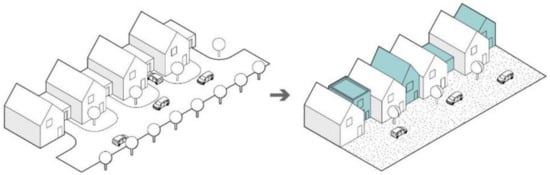
Concerning local changes, CAVs can impact residential development in the city centre and the suburbs. With the coming of autonomous vehicles, it will be possible to free many areas currently used by cars, which will have to be adapted and reused for other functions (Figure 7). For instance, the conversion of parking areas with the construction of new buildings for offices, homes, shops, or recreational spaces will lead to a consequent increase in the density of buildings. Some spaces currently occupied by private garages will be freed up (Figure 8).
Figure 7. Supposed CAVs’ effect on high-density residential areas
[36].
Figure 8. Supposed CAVs’ effect on peripheral areas with lower density
[36].
Ultimately, the introduction of self-driving vehicles will be slow and progressive and will undoubtedly have a different impact on the territory, depending on the type of vehicle and ownership. From the technological point of view, legislative and economic changes, the first scenario is the simplest to perform, in which a self-driving car replaces a simple one. From the urbanisation and spatial planning perspective, it is crucial to promote the introduction of the second scenario, which will exclude, or limit, the private ownership of vehicles, consequently reducing their number. The CAVs technology will lead to a progressive and irreversible change of the urban environment. Therefore, to avoid the negative consequences of introducing these new technologies, it is necessary to foresee changes to the urban environment to meet future needs.
 +1 point
+1 point