1000/1000
Hot
Most Recent
 +1 point
+1 point
Precision spraying, defined as the targeted spraying, obtains the target information (e.g., size, shape, structure, and canopy density, etc.) of the tree and then apply pesticides as needed. It addresses overdosing or underdosing problem by efficiently applying pesticides to the target area and substantially reducing pesticide usage while maintaining efficacy at preventing crop losses.
Over the past decades, orchard sprayer designs have evolved from hand-boom based horse-drawn wagons to sensor-controlled tractor-pulled sprayers, due to increased concern about chemical wastage and environmental contamination, changes in horticulture, increased demand for quality products, and development of new technologies. The revolution of sprayer design is listed in (Table 1). Various early devices for pesticide application were introduced back in the early 20th century, including pumps, nozzles, bellows, and steam-powered sprayers [1]. Given the labor shortage problems, early rapid adoption of air blast sprayers occurred in the 1940s. The strong farmer interest in this innovation encouraged a surge in the use of air-assisted spraying [2]. Boom sprayers and other innovations (e.g., mist blowers, handguns) from Europe were developed that allowed growers to apply pesticides more efficiently [3][4][5]. A significant change of chemical application strategies took place when the air jet models were developed that could carry the spray up and into the canopy [6]. The air jet models allowed chemicals to be sprayed from the ground instead of only being sprayed from planes. In the last two–three decades, modern sprayers including tunnel sprayers, tower sprayers, and precision sprayers have allowed orchard growers to reduce off-target deposition of spray materials and drift. Of these, precision or intelligent sprayers equipped with sensing technology have shown great potential to reduce excessive chemical applications [7][8].
Table 1. Revolution of sprayers used in orchard spraying.
| Evaluation | Sprayer Types | References |
|---|---|---|
| Early Sprayer Design | Steam-powered sprayers; boom sprayers and early mist blowers; handguns | [1][3][4][5] |
| Air Jet Models | Polar jets; plane jet sprayer | [6][9][10] |
| Modern Air blast Sprayers | Tower sprayers; tunnel sprayers | [11][12][13] |
| Precision Sprayers | Sensor guided air blast sprayers; intelligent sprayer | [7][8] |
Air blast sprayers (Figure 1) have been common in tree fruit orchards for a long time. The sprayers consist of a single fan located at the rear of the machine that pulls air in and redistributes it upwards into the tree canopy. The direction and volume of air are critical factors because the volume of air released from the fan must be matched with the tree canopy for appropriate spray deposition and coverage. These sprayers were introduced to orchards when trees were grown in the iconic architecture with a height greater than 6 m with many wide-spanning branches, and were planted in rows with spacings of 4–6 m. Fox et al. [14] showed that air blast sprayers were suitable for trees with such iconic architecture due to the large volume of air needed to push spray droplets 9 m into the tree canopy. However, many apple trees planted in the past few years are only 2 to 4 m tall and have smaller canopies, which creates problems in matching them to the air volume from conventional air blast sprayers [15]. Conventional sprayers bring significant challenges to matching the air output during spraying with what is needed for successful spray droplet deposition.

Figure 1. Air blast spraying systems (a) constant rate air blast sprayer; (b) intelligent sprayer.
Air blast sprayers include conventional axial-fan air blast sprayers, cannon sprayers, tunnel sprayers, tower sprayers, and custom-designed or modified air blast sprayers. The axial fan air-assisted sprayer produces a large radial spray volume and is the predominant design of sprayer used in tree fruit orchards. It is poorly targeted for modern intensive tree fruit orchards and creates a significant risk of off-target contamination by spray drift and chemical wastage to the ground [15]. Tunnel and crossflow sprayers have been poorly utilized due to increased expenses and decreased operational adaptability [8]. There are also problems associated with spraying with tunnel sprayers because of diseases that might be spread by physical contact or by reused spray solution while driving such a large machine through the orchards [14]. Tower type sprayers, which direct the airflow from the fan into horizontal ducts on a vertical plane, have improved spray coverage in the top center of trees and work well for trees with consistent heights. Cannon sprayers are commonly small in size and only require a small path for spray application, but may not produce uniform spray deposition and coverage because their performance is influenced by wind speed.
Conventional air blast sprayers designed for larger trees can waste more than 50% of pesticides to the ground and the atmosphere when spraying modern apple trees that have smaller canopies [16][17][18]. Spray applications in tree fruit orchards have been based on the application rate per unit area which was calculated from the number of rows and the average tree spacing. This was known as broadcast spraying, and did not automatically adjust for weather conditions, tree canopy density, missing trees, or the height and shape of the trees, and resulted in up to 60–70% off-target losses [19]. Precision spraying can substantially reduce off-target losses by using real-time tree canopy data to adjust the sprayers for precise and targeted pesticide applications.
Although various machine vision approaches have proved to be very useful and successful in weed detection, crop stress monitoring and yield prediction, etc., challenges still exist, especially in outdoor field conditions. Among the different types of sensors used in machine vision applications, camera sensors are more susceptible to outdoor lighting and weather conditions. The camera vision approaches might be best suited for spot spraying (spray based on site-specific disease or pest pressure) rather variable-rate spraying in the tree fruits. Recent developments of multispectral and hyperspectral cameras offer narrower spectral bands that can penetrate into the canopies and accurately measure the conditions (diseases or pest pressures and stresses because of nutrients) of trees. However, longer data processing time (particularly for hyperspectral cameras) is a major limitation. Current inventions of deep learning-based artificial intelligence systems resulted in good canopy detections and segmentations. Semantic and instance segmentation based deep learning models, including SegNet, U-Net, DeepLab v3, mask-region-based convolutional neural networks (RCNN), and so on, could be the best fit for canopy area segmentation; however, more efforts and extensive investigations are expected to develop an effective and robust system for precision spraying. Apart from camera sensors, ultrasound and laser scanner sensors can overcome light illumination problems usage sound waves and electromagnetic signals, respectively, as inputs to measure detection distance and gather canopy structure parameters. As compared to ultrasonic and camera sensors, laser scanner sensors are more accurate and reliable in collecting crop structure information, are not affected by weather conditions, and can guide the sprayer unit efficiently and effectively to apply pesticides on target.
The application of laser scanners has risen during the last decade in multiple agriculture applications, from automatic tree height measurement to site-specific pesticide application. However, challenges are still presented, especially in site-specific or variable-rate spraying in tree fruit orchards. Accurate canopy information measurements require automatic adjustment of laser sensor orientation during data acquisition, especially in conditions of different sloping and uneven terrains. Therefore, a real-time terrain monitoring system may need to be incorporated along with a sensing system for precision spraying. Terrain monitoring systems can be developed using a positioning sensor and a real-time kinematic global positioning system (RTK-GPS). An inertial measurement unit (IMU) sensor can be incorporated into the spraying system to monitor the terrain conditions in real-time and adjust the laser orientation accordingly. Studies reported IMU sensors could minimize positioning errors of the laser from terrain variabilities [20][21]. The RTK-GPS will locate the uneven terrain position and guide the spraying system to follow the co-ordinate where the necessary adjustment is needed for accurate canopy information. Few studies have considered uneven terrain information for correcting tree canopy information [22][23], so more studies need to be conducted to implement real-time correction of tree canopies for accurate spray deposition.
Laser scanner sensors only help with measuring canopy structure information, but a successful spraying operation requires a series of tasks to be completed accurately, including maintaining constant travel speed, adjustments of the fan speed at the sprayer unit, assessment of real-time weather conditions, prediction of droplet sizes and some other factors. Auto-guidance systems that automatically steer the sprayer throughout the orchard blocks could help maintain constant travel speeds. Crossflow fan sprayers reduce off-target spray deposition because they have more appropriate nozzle positions and uniform air delivery. An automatic damper system can be added at the sprayer fan’s air inlet (back of the sprayer) to control the airflow based on tree canopy information (Figure 2). A mathematical model will need to be developed to calculate the airflow required for sending the spray droplet to the desired canopies.
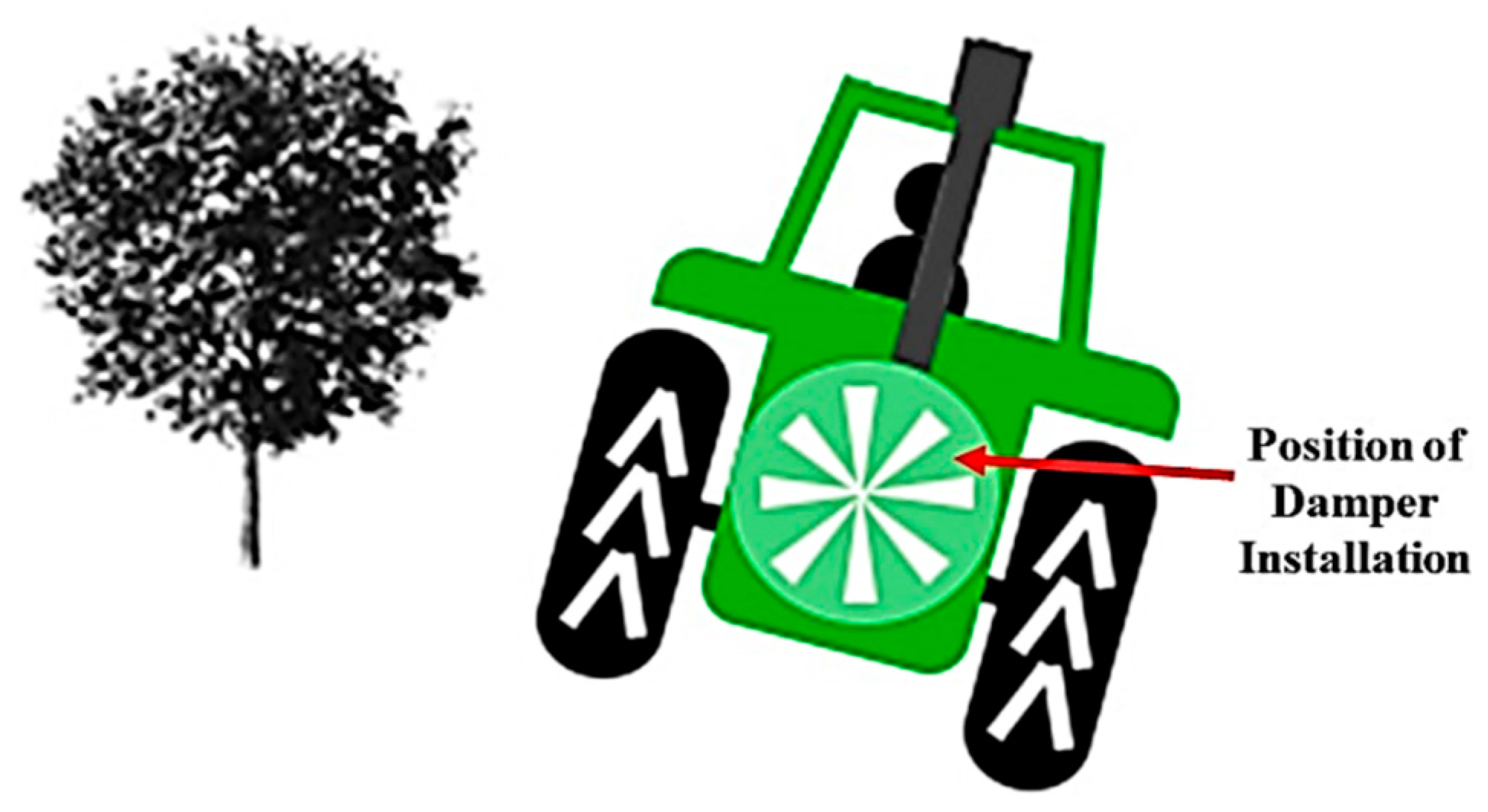
Figure 2. Position of damper installation for precision sprayer airflow control.
Real-time weather assessment is also important to reduce off-target deposition. Wind can easily blow spray from targeted to non-targeted regions. The real-time control of nozzles based on weather data is not currently practical during spray operation. The future sprayer also needs to include a droplet size prediction model to determine the diameter of droplets based on the characteristics of the tree canopies during spray operations. Electrostatic sprayers have provided improved deposition of specific droplet sizes and may be a good aid to develop next-generation sprayer systems [24]. Electrostatic sprayers apply a positive charge to liquids as they pass through the nozzle. The positively charged liquids are attracted to negatively charged surfaces, which allows for efficient coating of hard nonporous surfaces. A 44% increase in mean deposition using the electrostatic system reported by Pascuzzi and Cerruto [25]. Some other factors including canopy conditions and spray droplet retention depend heavily on the tree canopies and cannot always be addressed by the spraying unit. However, the nozzle effect can be resolved by matching appropriate nozzles with electronically controlled valves.
The future of precision spraying systems will focus on integrating a suite of robotic and sensor-guided spraying systems with fruit tree growth and structure information to ensure accurate dose of pesticide delivery and reduce off-target deposition. A wide variety of sensor-based spraying technologies are available to measure the amount of spray volume needed; however, it is also important to assess the durability of these technologies so that a variety of sensors can be added at reasonable price for the farmers. Concurrently with sensor development, site-specific disease, pests, and stress monitoring using technologies such as deep learning and remote sensing will improve the functioning of current sensor-based spraying systems. Fusing/integrating different sensors could help to add more decision-making features for more precise pesticide applications in tree fruits. Future spraying systems must also handle diverse agrochemical formulations beyond that of the standard aqueous mixtures currently used. Although tractor-based spraying systems are mostly used for agrochemical applications, an alternative UAV based application method could displace traditional sprayers. UAVs have been tested in the field crops for disease scouting, stress monitoring, and spraying, and its preliminary results for spraying is showing promise. But most of the current UAV based spraying technologies may not be suitable for spraying in large scale tree fruit orchards due to their limited payloads and variable spray deposition capability. More research and development into UAV swarms and large capability UAV similar to unmanned helicopters could result in more effective system for commercial/large scale fruit orchards. Detection of disease and stress, pest pressure are other avenues for their use in tree fruits production besides variable-rate spraying. Therefore, the integration of multiple sensing and control systems will be the key to using advanced precision sprayers in the future.
The excessive use of agrochemicals by conventional sprayers has gained attention among orchard growers, practitioners, and ecologists. Serious efforts are required to make an advanced precision orchard spraying system commercially available in an economically and environmentally sound manner. Considering the precision, accuracy, and numerous factors of using different sensors in outdoor environments, we conclude with the following guidelines for variable-rate spraying in the tree fruit orchards:
The canopy geometry, canopy density, leaf area index, and leaf area density are essential for variable-rate spraying and could be measured accurately with high precision using ultrasonic and LiDAR sensors;
The camera sensors-based sprayer can be a good aid for detecting position of the canopies and spot spraying; however, their performance is inferior due to environmental and sensor limitations;
The sprayer with ultrasonic sensors can have high precision in the orchard where the trees are discontinuously planted or trees with low canopy density and less variation among sections. These kinds of sensors can be useful for measuring average target canopy characteristics;
The LiDAR sensors guided sprayer could be suitable for many types of orchards (low, medium, or high canopy density) and provide canopy details regardless of the environmental conditions with comparatively high reliability and accuracy;
Use of LiDAR sensors must need advance algorithms and microprocessors to overcome the complex filtering problem and to process large amounts of information;
Fusion of different advanced sensors, application of new algorithms such as deep learning, and new research methodologies should be considered to develop the next generation advance precision sprayer for tree fruit orchards.





