Agriculture 4.0 is transforming farming livelihoods thanks to the development and adoption of technologies such as artificial intelligence, the Internet of Things and robotics, traditionally used in other productive sectors. Soft robotics and soft grippers in particular are promising approaches to lead to new solutions in this field due to the need to meet hygiene and manipulation requirements in unstructured environments and in operation with delicate products.
Soft grippers are those end-effectors that use materials and actuation methods that are soft, flexible and compliant and that enable the holding of an object to be manipulated.
In this context, soft technologies can be defined as the set of theories, techniques and procedures that enable key functions of soft robotic grippers, such as actuation, gripping and shape control methods.
1. Introduction
In the last decade, the agricultural sector has undergone a deep transformation to cope with the growing demand for food
[1][2][3]. Among the main tasks in agricultural processes, those that involve the manipulation of fruits and vegetables continue to be one of the most time consuming and labour intensive, resulting in low efficiency and limited competitiveness. This situation is exacerbated by the labour shortages of seasonal workers unable to travel between regions, leading to the accumulation of fresh products and impressive food losses. For these reasons, a great research effort is underway to automate these manual operations, as in the case of selective harvesting, combining multidisciplinary fields such as biological science, control engineering, robotics and artificial intelligence. Special emphasis is being placed on topics such as the modification of plant peduncles
[4], which could simplify the harvesting process
[5]; machine vision and detection systems
[6][7][8][9][10][11][12]; decision-making architectures
[13][14][15]; autonomous navigation
[16][17][18][19]; and dexterous manipulation
[20][21][22]. Another critical topic, often underestimated, is that related to the design of the systems attached to the tip of robotic manipulators and that are in direct contact with the fruit, known as grippers or end-effectors.
In manual harvesting, humans use their hands to move different elements of plants, grasp the fruits and detach them, either directly or with the help of a tool. The kinematics of human hands, the deformability of the skin and muscle, and their sense of touch give us efficient grasping abilities. Attempts to emulate human skills during harvesting have resulted in numerous mechanical end-effectors that can be classified according to their numbers of fingers into two major groups: multi-fingered and parallel grippers
[23].
Multi-fingered grippers, such as those proposed in
[24][25][26][27], include multiple degrees of freedom (DoFs), giving them grasping characteristics similar to the human hand, although they are expensive and difficult to control due to the large number of actuators. On the other hand, parallel grippers exhibit a simpler mechanical structure, making them easier to control, as they have fewer actuators. However, this simplification translates into less adaptability during grasping.
With the emergence of soft robotics, grippers based on soft and deformable materials have recently begun to be proposed for industrial and medical applications
[28][29][30][31][32][33][34][35]. These soft grippers, which are able to continuously vary their shape without requiring complex multi-joint mechanisms, have the potential to provide greater adaptability while presenting lower costs and simpler structures and control algorithms than hard end-effectors
[36][37].
With all this in mind, this review aims to present the current state of automatic picking tasks for several crops, identifying which methods are
commonly used based on the botanical characteristics of the fruits. Also, an evaluation criteria adapted to Agriculture 4.0 is established to perform a quantitative and qualitative analysis of the existing soft grippers. Therefore, this review intends to serve as a guide for those researchers who are working in the field of soft robotics for Agriculture 4.0, and more specifically, in the design of soft grippers for fruit harvesting robots.
2. Harvesting Process
2.1. Harvesting Process Classification
Since gripper designs for robotic harvesting are highly dependent on the picking process, the main techniques currently in use are summarized below with the aim of finding the gaps where soft robotics can make the greatest contributions. The general classification presented in
[38] divides the detachment of fruits into two methods: (i) mechanical detachment, which involves the removal of pieces of fruit from the tree branch by means of a machine or a mechanical mechanism, and (ii) manual detachment, which consists of the extraction of pieces of fruit from the tree branch by the human hand. In
[39], mechanical fruit harvesting processes are classified as follows: (i) those that remove the fruits by shaking the entire plant through air blasting, canopy shaking, limb shaking or trunk shaking; sometimes these methods are assisted with a chemical agent, which makes ripe fruits easier to harvest; and (ii) those that use automatic robotic picking machines that require minimal or no human intervention in their operation.
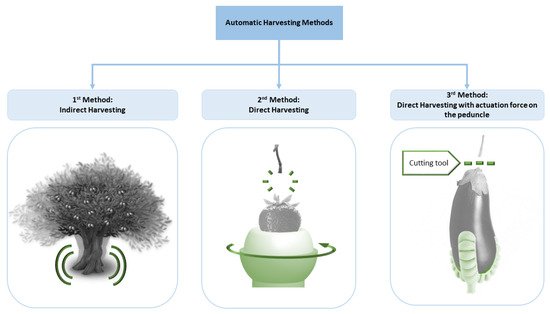
With the introduction of a wide variety of robotic solutions for fruit harvesting and the design of new grippers and end-effectors in recent years, it is convenient to update the classification of automatic harvesting methods to include these latest technologies. The classification proposed in this review is an extension of that carried out in
[40], which classified the removal of the fruits into two groups: (i) those in which the application of direct force to the harvested portion is necessary and (ii) those that deliver the removal energy indirectly as an inertial force response that causes detachment by accelerating the attachment support away from the harvest object. Consequently, harvesting methods are divided into three main groups, which are shown schematically in :
Figure 1. Classification of automatic harvesting methods.
- Indirect harvesting: a technique that involves indirect mechanical movement towards the fruit through a force applied to the plant itself, such as that carried out when harvesting olives [41], almonds [42] or pistachio nuts [43]. To make the fruits fall without any contact points, methods such as air blasting, limb shaking, trunk shaking and canopy shaking are often used .
- Direct harvesting: a method used in those crops that, due to the structural characteristics of the plant, cannot be shaken but require the direct application of a mechanical force on the fruit or its peduncle; these picking techniques, which are discussed in more detail in Section 2.2, are also known as picking patterns (e.g., twisting, pulling or bending) and cause fruits to detach from the stem [44]. Examples from this group are the methods used in the harvesting of strawberries [44][45], apples [46][47][48][49] and several varieties of tomatoes [50][51][52][53].
- Direct harvesting with an actuation force on the peduncle: a technique that is applied to those fruits that require a direct mechanical movement, or another type of cutting method, applied directly to the stalk since due to their morphology they are connected to the plant by a hard peduncle that must be cut, as in the harvest of aubergines [54][55], melons [56], oranges [57], cucumbers [58] and peppers [59][60].
In the classification of the harvesting processes presented above, it is important to highlight that the fruits included in the first group can also be harvested using the methods described in the second group due to the physical characteristics of the peduncle. The most suitable harvesting method to use must be studied on an individual basis depending on the crop. Several factors may influence the choice of the most suitable harvesting method, such as (i) the size and shape of the tree
[40], (ii) the structural fragility of the plant
[40], (iii) the maturity stage of the fruits
[61], (iv) the lack of preharvesting chemical fruit looseners, which affect the ease of harvesting , (v) the requirements of avoiding damage to the fruit or the plant
[40][61] and (vi) the financial profitability . Some authors
[62] discourage the use of products such as chemical fruit looseners before harvest due to their effect on the defoliation of the trees and the subsequent lack of bloom in the following year. This complicates harvesting through indirect contact of the various fruits within the first group, which in some cases are collected by air blasting, limb shaking, trunk shaking or canopy shaking .
There are also several differences between the requirements of the group 2 and group 3 techniques. For instance, the harvesting methods included in group 3 need a more sophisticated perception system than those in group 2, since in addition to the fruits, they have to detect peduncles; they also require a robotic system with greater precision to locate the peduncle between the blades of the tool and proceed to cut it without damaging the crop
[51], while with the group 2 techniques, fruits can be harvested with part of the peduncle with just one picking action.
In the literature, authors of
[63] resume the main capabilities of an ideal picking robot as the following: (i) the 3D location of the fruits in the plant, (ii) trajectory planning, (iii) the application of detachment method and adequate storage, and (iv) the application of reliable driving system. These operations must be carried out under the constraints of (i) increasing the harvest ratio between robotic picking and manual picking, (ii) increasing the quality of the harvested fruit, and (iii) being economically justified. Furthermore, ref.
[64] highlights two main challenges in fruit harvesting: (i) an adequate manipulation of fruits to avoid the loss of quality and consequently, the loss of value in the market, which implies the development of grippers and end-effectors that meet this requirement, and (ii) the study of the detachment method for removing the fruit from the tree, which varies according to the type of fruit.
2.2. Picking Patterns
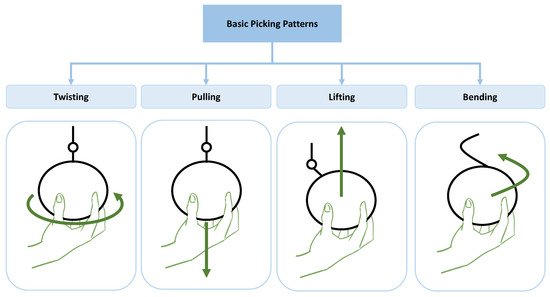
As stated above, the fruits harvested by means of the methods classified in group 2 pose a challenge in the field of robotic manipulation. One of the research paths in this field is based on the idea of studying and decomposing the human movements performed during the harvesting of fruits and replicating them using robotic grippers. These movements are grouped under the concept of picking patterns, which include, among others, the movements of bending, lifting, twisting, and pulling or a combination of them. In , the basic picking patterns are shown conceptually.
Figure 2. Simplified scheme of basic picking techniques.
An important factor that has been studied within the field of biological science for group 2 methods, and particularly for the application of the picking patterns, is the abscission layer, which is a barrier of thin-walled parenchyma cells that develops between the fruit and the fruit stalk or the fruit stalk and the branch. This development process occurs when the moment of the fall of a fruit from a plant approaches to facilitate detachment
[65]. In most cases, fruit harvested before development of the abscission zone will not have well-developed sugar, volatile, or flavour attributes
[66]. Some investigations are trying to modify or eliminate this layer by modifying the plant so that the next point of separation of the plant from the fruit is located right in the calyx and the fruit is easier to harvest
[5]. Therefore, the identification of the abscission layer is important to determine where the fruit separates from the plant at the time of harvest, as well as the picking patterns to apply.
In the literature, there are studies available on picking patterns for (i) tomatoes
[50][51][67], (ii) kiwis
[68], (iii) apples
[64] and (iv) strawberries
[69][70]. It is also worth mentioning the study presented in
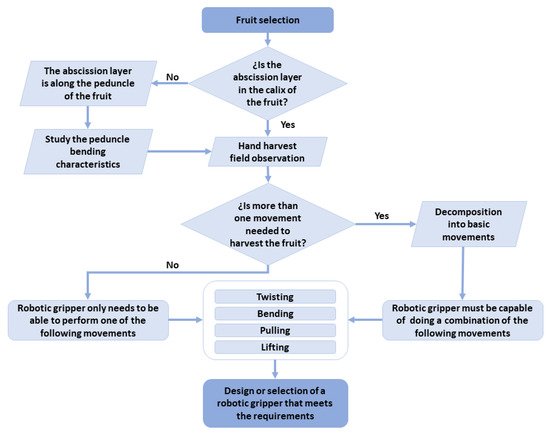
[71], in which the movements of the hand and the human body in the harvesting process are analysed to provide a guide for the design of new grippers and end-effectors of anthropomorphic inspiration. The scheme shown in summarizes the proposed steps to follow for the design or selection of grippers and end-effectors required to harvest fruits by means of direct contact methods.
Figure 3. Steps to design or select a gripper or end-effector based on the study of a picking pattern.
Since the picking patterns described in this section involve direct contact with the fruit, the introduction of soft grippers may represent a significant advance in the automation of the harvesting methods classified in group 2, allowing a delicate manipulation that guarantees the integrity of fruits.
2.3. Direct Harvesting with an Actuation Force on the Peduncle
Regarding group 3, a comprehensive classification of the types of mechanisms used in grippers coupled to manipulators for the harvesting techniques of group 3 can be found in
[2]. Research studies on this third group
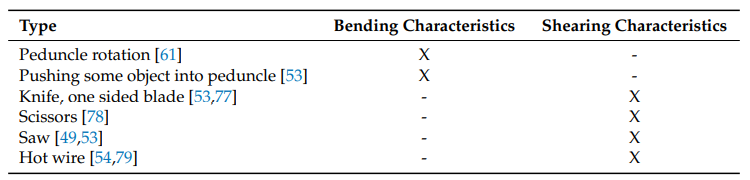
[72][73][74][75][76][77][78] have focused on the shear characteristics of the plants, such as the shear ultimate stress, the maximum force and the shear energy. These characteristics could be helpful in the study of the peduncles of fruits, with the aim of developing more energy-efficient cutting tools. For cutting peduncles, there are several techniques that can be classified into two groups: (i) techniques based on the bending characteristics of the stalk, such as the bending force, bending stress and Young’s modulus, and (ii) techniques based on the shear characteristics, such as the shear force, shear strength and shear energy. presents the classification of several cutting techniques. According to this table, the tools that do not use the bending force have in common the need to consider the cutting characteristics, in particular, the cutting force and the cutting energy required to separate the fruit from the plant. Since laser cutting is not based on the peduncle characteristics, it has not been included in this table
[79].
Table 1. Classification of existing grippers.
Therefore, harvesting techniques of group 3 are also candidates for the introduction of soft gripper technology, provided they are complemented by a suitable cutting tool.
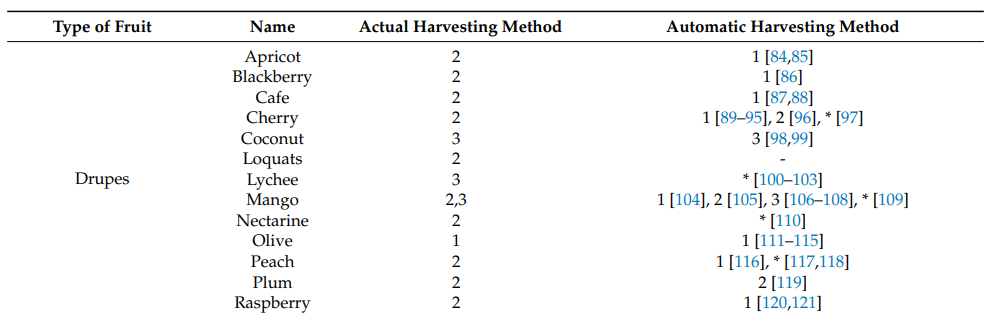
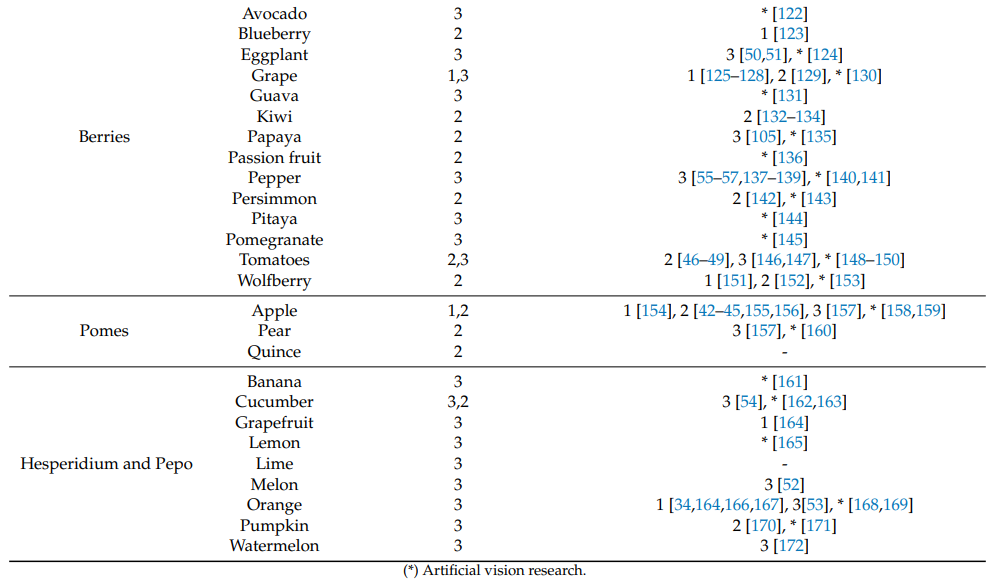
2.4. Literature Overview of Crop Harvesting Automation
and present a collection of articles that propose technological solutions for automatic harvesting, botanically classified according to the target fruit
[80]. This botanical-based classification divides fruits into simple fleshy, aggregate and multiple. Simple fleshy fruits (such as a berries, drupes, or pomes) are those derived from a single ovary of and individual flower
[81]. Aggregate fruits (such as raspberries) consist of many individual small fruits derived from separate ovaries within a single flower, borne together on a common receptacle
[82]. Lastly, multiple fruits (such as figs, mulberries, or pineapples) are those derived from the ovaries of several flowers that coalesce into a single structure
[82].
Table 2. Simple fleshy fruit classification.
Table 3. Aggregate and multiple fruit classification.
In addition, in each table, the harvesting method used is identified, following the classification of harvesting techniques proposed above and taking as a reference both the information presented in
[40][83] and the visualization of the harvesting processes. Although the proposed solutions may be valid for several crops, they have been assigned only to those crops where an experimental study has been reported. Additionally, it is taken into account that the crops classified in groups 2 and 3 are the most suitable for the adoption of soft gripper technology.
3. Evaluation Criteria for Soft Grippers
An evaluation criteria adapted to Agriculture 4.0 is established to perform a quantitative and qualitative analysis of soft grippers. These criteria are listed below.
- Object size: This is one of the most critical aspects to evaluate soft technology since its use in certain crops depends on it. Passive structures with external motors, fluidicelastomer actuators (FEAs) and controlled adhesion are the technologies with the bestcapacity to grasp large objects.
- Gripper size: Another criterion is the size of the device, which can be critical to accesscertain crops.
- Lifting ratio or operation range: This variable can be interpreted as the ratio between the mass of the object and the mass of the gripper or as the force that the soft actuator can exert. If interpreted as a ratio, it should always be related to the maximum size of the object that can be grasped. For example, shape memory alloy (SMA) actuatorshave a higher lift ratio than FEAs but a less manipulable object size, which reducestheir suitability for fruit picking.
- Power consumption: Each soft technology requires a different type of support device. The technologies that require electric motors or pumps to operate demand the highest energy consumption.
- Scalability: This feature takes into account not only the ease of manufacture but also the modularity of the technology used. This is especially important for the adaptation of soft grippers to various types of crops, and it is desirable that they be as universal as possible to increase their viability.
- Controllability: Depending on the soft technology used, several proposals for low�level control systems can be found. Normally, the most widely used control method is open-loop. With respect to fluidic actuators, liquid-based devices can exhibit more linearity than pneumatic devices.
- Response time: This variable can affect the efficiency of the agricultural task. It may be difficult for soft actuators that rely on a fluid to achieve high actuation frequencies due to the fluidic impedance of the channel and the flow actuation level.
- Surface conditions: Soft gripper technologies that require a clean surface, such as controlled adhesion, are less suitable than those that do not have any surface-related requirements.
- Degree of skill to working in unstructured environments: Although soft technology is one of the most suitable for working in unstructured environments, not all soft grippers that can be found in the literature are suitable for agriculture scenarios. This is the case for devices that require complex support devices that are sensitive to large holes or that can suffer tears from sharp objects [84].
- Mechanical compliance: Each soft technology has an advantage in terms of compli�ance. For instance, FEAs, shape memory polymer (SMP) actuators and dielectric electroactive polymer (DEAP) actuators are inherently compliant due to the materials used. With other technologies, such as SMA actuators, this parameter depends on the shape of their structures.
- Lifetime: The parameter is the number of cycles that a soft actuator can remain in operation before failing or exhibiting altered motion patterns. Lifetime is an important characteristic in FEA technology, which is subjected to constant fill and empty cycles that tend to wear away the material.
- Technology readiness level (TRL) [85]: Another criterion to compare the feasibility of each technology could be the TRL. Those that have experimentally demonstrated their efficiency in real operating environments, as well as those that are also easier to put into production due to the type of support devices they use and the materials and manufacturing process they require, have a higher TRL.
According to this classification, controlled adhesion technology may be difficult to adapt to agricultural tasks, as it requires a special surface to be able to grip an object,although the weight lifted/weight gripper ratio (39
[86] – 286.7
[87]) and the size of theobject could be suitable (0.16 × 10−2 m
[88] to 100 × 10−2 m
[89]). Regarding the grippers grouped around control stiffness, granular jamming ones stand out, since they have a good weight lifted/weight gripper ratio, as well as a good response time and the ability to lift small to medium-size fruits. The other components in this group are discarded for harvest purposes since their performance is not ideal for these tasks. Finally, in the actuation technology group, passive structures with external motors and FEA actuators could be ideal ones for fruit harvesting grippers because (i) they have a large lifted size/gripper weight ratio; (ii) the size of the object can be between 0.01 and 100 × 10−2 m, which includes the sizes of most fruits; (iii) they have a good response time; and (iv) they have the ability to grasp any object. A disadvantage may be their energy consumption since they are hampered by the need for an electric motor or pump. Nevertheless, these technologies present the highest TRL level, which would facilitate their production.
 +1 point
+1 point